悬臂式掘进机自动截割控制系统的设计分析
2022-03-24杨晨亮
杨晨亮
(霍州煤电集团河津杜家沟煤业, 山西 运城 043300)
引言
目前,由于矿井装备的自动化与机械化速度加快,采掘设备被逐步广泛应用于各大煤矿中,其中悬臂式的掘进机被应用较多,由于现场人员对其在实施操作控制时要按照井下不同的煤岩的地质来实施,而且存在很多的不确定因素,导致开采作业时产生了许多问题。因此,设计了一种掘进机截割自动控制系统,通过变频与智能控制,按照其变化的状况实施自动化、智能化的调节截割电机的运行参数,促使掘进迅速、安全与稳定的进行。
1 掘进机的构成
在本文中设计截割控制系统采用的研究对象是EBZ-200 型悬臂式掘进机,其使用非常普遍,悬臂式掘进机结构图如图1 所示。

图1 悬臂式掘进机结构示意图
以巷道设计为基础,悬臂式掘进机按照设计的截割途径,截割煤岩体使用的是截割头与截割臂的转动与移动,一直到巷道断面。按照悬臂式掘进机做工特征,悬臂式掘进机控制的对象主要是油缸的运行参数和移动,而且其特点是自适应调速、路线规划、自动截割作业等[1-2]。
2 控制系统的总体控制方案
为使悬臂式掘进机实现自动截割,以计算机与可编程控制器为基础并结合悬臂式掘进机的主要结构,设计了一种悬臂式掘进机自动截割控制系统,提出了控制系统的总体控制方案,使以下功能得以实现,如可视化显示、截割头姿态、远程通信、截割路径跟踪和截割路线规划等,图2 即为控制系统方案。
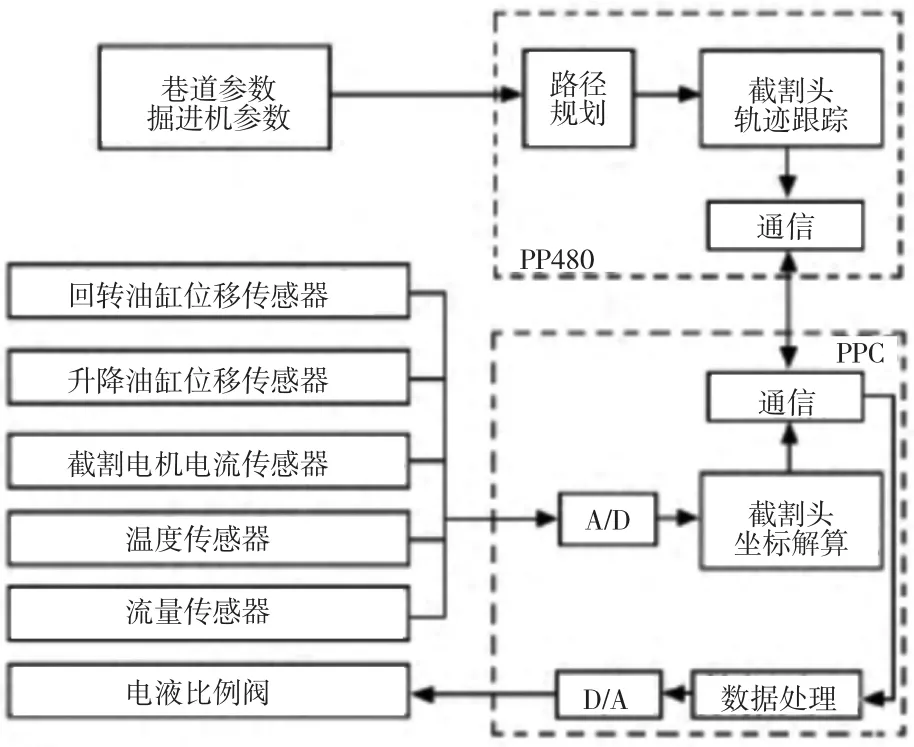
图2 控制系统方案
控制系统的运行流程为:悬臂式掘进机中的油缸的有关参数如电流、位移、流量、温度等会被A/D转换器采集并输送给可编程控制器,根据其对截割头的姿态与位置的分析,然后计算机接收CAN 通讯传递的信息[3]。根据技术参数、断面的形状、巷道的尺寸等信息,使可编程控制器的以下功能能够实现,如自适应转速的调节与截割路线规划。使用具有通讯功能的计算机与可编程控制器,在截割轨迹与规划截割路线的基础上,计算控制量的实现使用的方法是截割臂轨迹自动跟踪算法,然后为了控制电液比例阀需要D/A 转换器对电流进行输出与控制,促进自适应截割控制截割头得以实现。
3 控制系统的硬件部分
控制系统组成框图即为图3。从图3 中可知,下位机、检测单元、执行单元、控制单元等构成了控制系统。把检测单元安装在悬臂式掘进机中,其能够通过每种传感器把有关掘进机截割的所有信息参数获取到,控制单元能够记录与储存所有被传感器获取的数据信号,分析掘进机截割头工作时候的截割状况,自动控制掘进机截割流程的是执行单元。
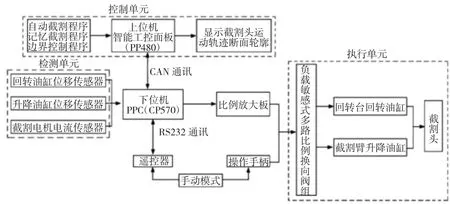
图3 控制系统组成原理图

表1 控制系统硬件选型
4 控制系统的软件部分
设计控制系统使用的是贝加莱Automation Studio 仿真软件,贝加莱Automation Studio 仿真软件有以下特点:多样的控制目标、简便的C++语言程序、高效的自动化组件[4],而且开发上、下位机系统的条件都符合。
4.1 控制的基本
按照掘进机截割头不同角度与位移分解对应的姿态和位置,掘进机自动控制得以实现的基础是把掘进机的姿态与位置进行尽快更正。把三维直角坐标系建立在掘进机需要掘进的巷道中,在坐标系中,与巷道底板垂直向上的用X 轴表示,为其正向,与巷道的水平方向相同的用Y 轴表示,为其正向,与掘进机掘进方向相同的用Z 轴表示,并为其正向。
在三向分解掘进机的机身的姿态和位置以后,依据对其姿态和位置进行测量之后得到的数据,更正其姿态和位置,进而确保掘进机的姿态与位置始终都是正确的。
4.2 自动截割控制
PID 控制技术被控制系统用于自动截割控制掘进机,PID 控制技术有以下优点,如运行可靠、结构简单、线性控制等,而且在井下现场操作的环境下也可以使用。起初,把PID 控制器的参数进行设置,并把测量出来的偏差数据输入到PID 控制器,能够判断与分析数据,然后处理结果被通讯系统当做输出信号,进而实现控制与掘进机有关的机构,促进闭环控制系统的形成[5]。
把与自动截割控制有关的数据进行采集是PID控制器第一步要做的,并把回转体中心安装在旋转编码器,把截割臂安装在位移传感器,采集截割臂纵向的位移数据的是位移传感器,采集截割臂横向的位移数据的是旋转编码器。在计算与比较被传感器收集的给定值和数据信号的偏差,并让PID 控制器接收与计算偏差值,计算完成后并把相对应的信号输出来,实现控制掘进机截割臂的动作,使CAN 总线成为连接整体的PID 控制器和别的设备的纽带。掘进机截割臂PID 控制器工作流程示意图如图4 所示。

图4 掘进机截割臂PID 控制器工作流程示意图
5 结语
悬臂式掘进机自动截割控制系统是基于计算机与可编程控制器,下位机、检测单元、执行单元、控制单元构成了整个控制系统,使以下功能得以实现:可视化显示、检测截割头姿态、跟踪截割路径、规划截割路线等。井下掘进工作面应用的模式是手动截割模式,其缺点粉尘污染较大、能见度比较低,现场操作人员在操作移动截割臂与转算截割头动作时只能根据经验来操作,断面成型的时间平均是22 min,作业效率较低,造成比较差的巷道断面成型效果;但自动截割模式与手动截割模式相比,自动截割模式的巷道断面成型效果好,形成的时间只有19 min,减轻了掘进作业人员劳动强度,提高了掘进作业效率。