带式输送机智能控制系统可行性探讨
2022-03-24宋阳阳
宋阳阳
(山西西山晋兴能源有限责任公司斜沟煤矿, 山西 吕梁 033602)
引言
大输送量、长距离输送带式输送机是大型煤矿运输系统的主要设备,其运行环境相对恶劣,运转速度高、载荷大,启、停过程的脉动冲击频繁,输送带的跑偏、撕带、打滑问题较多[1-2]。
本文基于带式输送机机械结构、运动学特性,研究采用多滚筒双电动机的匹配控制策略,实现电动机的功率平衡,从而保证带式输送机的安全、稳定、可靠运行。
1 带式输送机存在问题和不足
随着煤矿井下输送距离和运量的增加,一台电动机已无法提供足够牵引力,因此需采用多滚筒双电动机的驱动模式[3]。理论上电动机功率和牵引力是平衡的,输送机运行中受输送带载荷分配、电机特性、皮带张力的影响,电动机功率和驱动力分配偏离较大,直接造成输送带受力和电动机功率负载的不均衡,个别载荷过重的电动机容易出现故障,制约煤矿开采的有序安全进行。
带式输送机运行环境较恶劣,随着控制系统和信息系统的引入,带式输送机系统变得相对复杂,尽管采用了各种措施和方法来提高带式输送机的安全性和可靠性,但技术人员很少会系统地研究输送机故障及因果关系,因此缺乏降低输送机故障发生率的策略和应对手段。
现有输送系统采用集中控制模式,控制的核心为电机互锁、延时启停、电气设备状态监控和故障信号传输,但是井下输送系统的设备布置相对分散,目前监控系统采用的单片机和集成电路可靠性差,维护成本高,且控制系统信息传输能力有限,很难适应这种恶劣的传输环境[4]。
2 智能控制系统的控制策略
输送机的智能控制必须研究输送带自身黏弹性和在牵引力驱动下整个输送带张力的变化,选择最佳可控起动速度曲线,以保证起动的平稳性,降低惯性力对设备的冲击作用。加速度曲线有四种模式,分别是等(线性)加速度、三角形曲线、正弦曲线、抛物曲线,如图1 所示。等(线性)曲线速率为0,但启动加速度最大,启动冲击也最大。综合考虑启动冲击和速度变化大小,正弦形加速度(J)曲线是变频调速驱动的最佳选择,其加速度(J)和时间(t)曲线方程如下:
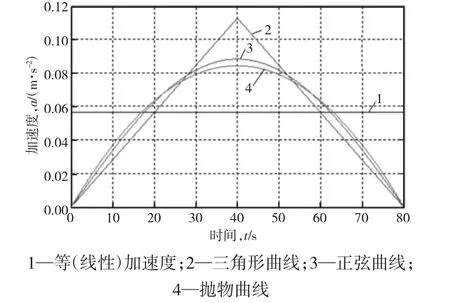
图1 四种加速度曲线

式中:T 为启动时间,s;αmax为最大加速度,mm/s2。
现代化煤矿生产用长距离带式输送机采用双滚筒或三滚筒驱动模式,通过多个较小驱动单元满足生产要求,可有效减少输送机的体积,减小输送带最大张力,但是该驱动模式必须提高安装精度,充分考虑电动机功率失衡、机械偏载等问题。如何保证多电动机之间输出的功率和牵引力之比与设计比相等,实现多电动机的功率平衡是控制系统设计的关键。输送机在速度为V 时,牵引力源于滚筒与输送带的摩擦力,滚筒在电动机驱动转动时,滚筒1 输送带和滚筒切入点的张力T11大于分离点张力T12,张力差为滚筒1 所产生的牵引力,双滚筒驱动受力分析方法相同,如图2 所示。
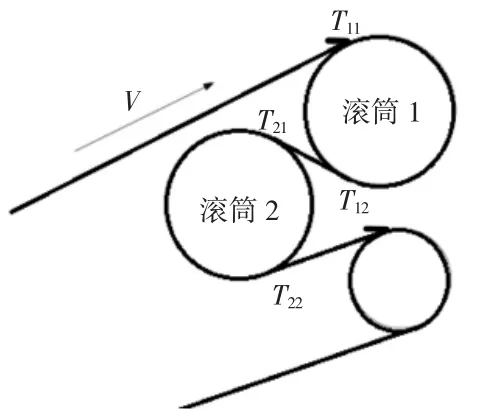
图2 双滚筒受力模型
基于模糊控制和PID 控制模式,采用速度补偿的模糊PID 控制方法实现两台电动机的功率平衡。通过比较器读取、计算变频器输出转矩差值,通过速度补偿对两台变频器的给定输入速度进行实时修正,以实现滚筒速度和输出转矩的同步,实现功率平衡控制,并抑制输送带打滑现象。
3 智能控制系统设计与实施
智能控制系统基于PID 控制技术和模糊控制,即使没有精确的数学控制模型,依然能实现稳定控制。根据转矩偏差和转矩偏差率调整PID 参数,保证两台电动机牵引力平衡。输送带处于偏载时,两台电机转矩快速同步,减少转矩偏差;电机的转矩接近时,必须防止超调现象,取消微分环节,直接采用PI控制器增加系统稳定性。两台电机转矩差较大,微分系数(KP)取大值以快速消除转矩差,并设计积分系数(KI)取零,防止超调的出现。转矩偏差和转矩偏差率同号或异号时,两台电机转矩朝偏离方向相同或者相悖,其控制工作原理如图3 所示,并通过仿真分析模糊PID 的控制性能,调整量化因子和比例因子,满足预定的控制效果。

图3 自适应PID 工作原理图
智能控制系统分为集中控制和现场控制,实现驱动电动机之间的功率平衡。通过I/O 接口发出指令实现起车、紧急停车和故障保护;现场控制设置手动控制按钮,主要为了应急和调试设备时使用。带式输送机智能控制系统分为监控、控制和执行三层。煤矿调度室设置人机界面(HMI),数据传输和交换通过以太网交换机与CPU 的以太网模块完成,组态软件通过图形图标的方式展示控制系统的运行状态参数。控制层由PLC 为中心现场总线构成,现场总线标准为开放式,屏蔽双绞线采用传输介质,系统为总线拓扑结构,如图4 所示,控制系统通过读取I/O 的状态,对设备运行控制和监视。
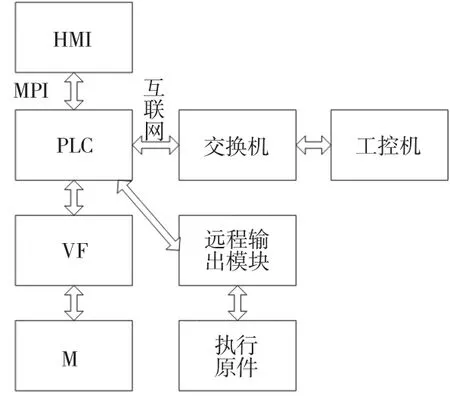
图4 控制系统拓补图
执行层主要由变频器和远程输出模块组成。设置一个具有DP 网络接口的RPBA-01 通信模块,以实现光电隔离总线信号和短路保护作用。现场控制传感器电流或电压值、电气元件开关、开关检测信息和执行元件输出电流。现场控制通过专门设置的屏柜对输送机主要设备的控制,实现开停设备。具有远控和检修的功能,上位机通过按钮远程控制输送机起停;输送机在检修时,各部设备可解除连锁关系,实现独立运行,完成检修过程。
4 结论
针对长距离、大运量多滚筒双电动机带式输送机的起动冲击、多滚筒功率不平衡问题,对比多种加速度曲线与起动速度曲线的优劣,确定以正弦形曲线作为最佳起动速度曲线。基于PID 模糊控制策略,采用速度补偿的功率平衡控制模式,实现双滚筒驱动力的分配比的平衡,从而减少对运输系统的损害,提高带式输送机的运行平稳性,保证煤矿安全、稳定生产。