煤矿主通风机自动化控制技术研究与应用
2022-03-24武波
武 波
(西山煤电集团有限责任公司西曲矿, 山西 太原 030000)
引言
矿井主通风机素有“矿井肺腑”之称,担负着向煤矿井下工作面输送新鲜空气、排出有毒有害气体和粉尘的重任,是保证矿井通风系统安全稳定运行时煤矿安全生产的重要工作。矿井通风机作为矿井通风系统主要通风设备,在日常生产中由于通风机数量较多,在正常运行过程中通风机存在间歇时间长、通风效率低、低负载运行等问题,严重浪费电能。所以对通风机进行变频调速是十分重要的。此前廖丽等[1]在分析矿井通风机变频调速系统总体设计的前提下,对PLC 控制平台及矿井通风机变频调速控制进行分析,给出了相应的风机变频调速系统,为其余矿井通风变频控制系统的构建提供参考。蒋金庆[2]针对通风机不能根据需风量进行实时风量控制的问题,在原有通风系统的基础上对通风机变频调速系统进行总体设计,并给出了相应的硬件、软件设计过程,并通过现场实践验证了设计的变频控制系统的可行性。本文利用PID 控制器对矿井通风机进行风量自动调节研究,有效地提升了矿井通风机的工作效率,为矿井高效生产提供一定的参考。
1 自适应模糊PID 控制技术
传统通风机有大惯性、模型时变及大时滞等特性,其运行过程中的控制量不能准确反映系统的扰动,所以通风机的控制十分复杂。随着计算机科学的不断发展,智能化逐步运用于矿井开采中,基于自适应模糊PID 控制可以较好地实现变频控制。自适用模糊PID 控制器是采用自适应模糊推理的方式,对PID 调节器的各个参数进行整定,从而实现稳定控制[3]。自适应模糊PID 控制器结构示意图如图1 所示。

图1 自适应模糊PID 控制器结构图
由图1 可以看出,自适用模糊PID 控制器的工作流程为对控制器进行给定值的输入,给定值输入后对给定值与实际值进行比较分析,确定两者的差值,此时模糊推理控制模块会对差值进行分析,从而得出修改PID 控制器的参数,实现实时调节,系统一直持续循环以上过程,实现控制器的最优化管理。
通风机风量调节原理同样是对给定值进行一系列的计算,从而对比得出变频器输入量,实现异步电动机的实时控制,达到控制风量的目的[4]。
对比分析自适应模糊PID 控制与模糊控制响应曲线,首先进行仿真模拟的数据设置。由于两者为单一变量对比,所以两者的参数设置应当一致,完成模型的设置后进行仿真,仿真结果如图2 所示。


图2 仿真模拟曲线
如图2 所示,当延时为1 s 时,此时的自适应模糊PID 控制曲线在60 s 时达到稳定,而相应的模糊控制曲线120 s 达到稳定,所以在延时为1 s 时的模糊控制曲线达到稳定的速度较自适应模糊PID 控制曲线慢。当延时为10 s 时,此时的自适应模糊PID控制曲线在120 s 时达到稳定,而相应的模糊控制曲线160 s 达到稳定,延时为10 s 时的自适应模糊PID控制曲线达到稳定的速度较模糊控制曲线要快。从以上分析可以看出,自适用模糊PID 控制对风量的控制响应较快,能较好地解决系统控制的时滞性。
2 变频控制系统设计
通过仿真研究确定了自适应模糊PID 控制技术后,对系统风机变频调速控制系统进行设计。本文的PLC 控制器选定S7-400H 为核心控制器,利用传感器对系统的风压等参数进行采集,通过通信模块实现控制器与变频器的数据交流,同时利用上位机实现风机数据的显示。PLC 控制器的输出电流为10 A,接口模块为IMI153,数字量输出输入模块分别为6ES7322-1CF0-0AA0 和6ES7321-7BH01-0AB0,模拟量的输入输出模块分别为6ES7331-7KF02-0AB0和6ES7322-5HF00-0AB0,与上位机采用CP1623通信板卡连接。
对通风机的控制程序进行设计,程序的控制流程如图3 所示。
根据图3 可以看出,程序运行可分为手动及自动模式两种,其中手动模式是操作人员根据实际的通风机运行状态对系统进行切换,自动模式是控制器对分支风道内部的负压和风速进行监控。为了避免风流短路事故,在程序中增加两组立风门和平风门,两风门为互锁状态,当1 号风机发生故障且短时间内无法恢复时,此时2 号风机启动。在风机正常运行过程中控制器通过对采集数据与标准值进行实时比较,当出现采集风量与标准值差距较大的情况时,此时程序会对偏差进行计算,得出变压器的频率变动值,同时为了保证控制的效果,设定阈值为±4 Hz,避免调节过大造成的冲击,实现风机风量的变频控制[5]。
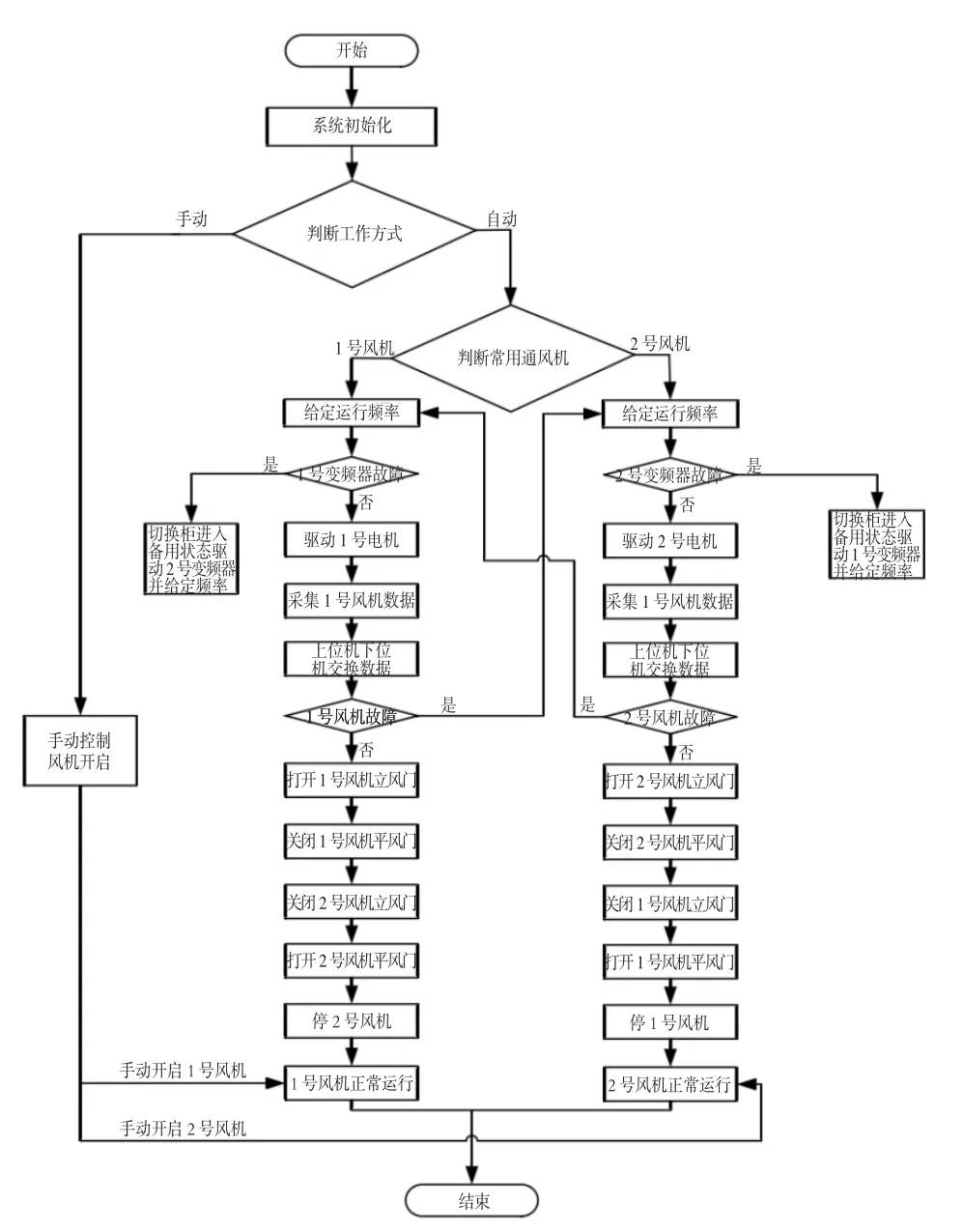
图3 程序的控制流程
对上位机进行设计,人机界面为人与系统交流的媒介,其主要用于参数的显示,同时上位机需要对风机、风门及变频器等设备的运行数据进行储存,上位机的组态软件框架如图4 所示。
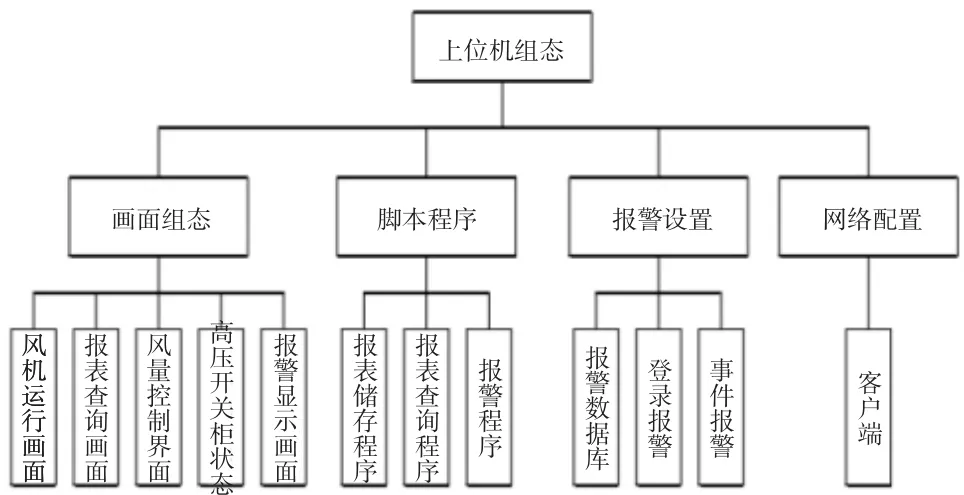
图4 上位机的组态软件框架
从图4 可以看出,上位机的组态系统共4 个部分,分别为画面组态、脚本程序、报警设置及网络配置,其中画面组态包括风机运行画面、风量控制界面、报警显示界面、报表查询界面及高压开关柜状态,同时系统可以将运行状态及风量等随时间变化曲线进行绘制,便于对比研究。报警系统可以监测风机的速度、温度、风流量、负压等参数,根据提前设定的阀值,从而给出报警范围,当检测的数据超过正常范围时,此时系统会自动报警,并亮起故障灯[6]。
对设计的变频控制系统进行应用研究,根据实际地质情况测定的给风量7 500 m3/min 进行设定,将风量输入至上位机组态软件,开始进行系统运行。根据系统反馈的数据可以看出,频率值为25.5 Hz,控制器的输出频率不断上升,此时风量上升至7500m3/min,由于存在一定的滞后性,使得风量超过给定值,此时显示的输出频率降低;风量维持在7 500 m3/min,此时变频器的数值持续保持在25.5 Hz,自适应模糊PID 风机变频系统达到了预期的效果。
3 结论
本文对自适应模糊PID 控制技术原理进行分析,并对比模糊控制技术及自适应模糊PID 控制技术的响应速度,发现自适用模糊PID 控制对风量的控制响应较快,给出了自适应模糊PID 变频控制通风系统的总体设计目标,并对变频控制系统的硬件及软件进行分析,给出了自适应模糊PID 变频控制系统。通过对变频控制系统应用进行分析,发现经过优化后的自适应模糊PID 风机变频系统达到了预期的效果。