矿用超声倒车预警系统★
2022-03-24段庆
段 庆
(太原理工大学电气与动力工程学院, 山西 太原 030024)
引言
超声波以其非接触、抗干扰强、结构简单、成本低等优势在测距领域获得广泛推广应用。尤其是在煤矿井下,存在光线条件不足、反射性能差、粉尘灰尘影响、潮湿环境等不利因素,超声测距作为一种可靠有效的的距离测量方法具有重要的作用。文献[1]设计了超声测距的硬件结构,编写了配套的软件,并应用于环境探测机器人,实现了距离探测。文献[2]研究针对船舶测距技术需求,设计了船舶周围接近物体的超声探测技术,实现对目标的距离和方位测量,确保航行安全。文献[3]针对塔式起重机力矩测量中力臂距离测量技术难题,提出一种高精度的超声测距方案,具体为使用直射布置并通过软件优化最终实现了测距精度的显著提升。
煤矿井下地形狭长,照明条件较差,机车驾驶员在此条件下长时间驾驶,极易引起精神和视觉疲劳,为煤矿井下的安全生产埋下了隐患。为辅助驾驶员在燃爆环境下安全驾驶,设计基于煤矿本质安全的超声预警系统,对周围环境进行实时监测及安全预警具有重要意义。
1 设备本质安全的实现
电子设备的本质安全功能实现需要在电路结构设计及器件选择时预先考虑,具体要求为电路在发生短路时产生的电火花或热效应限制到燃爆性气体点燃能量值以下,并要求通过实验测试进行确定。
1.1 本质安全电路的设计
接通电路和断开电路的瞬间产生的电压和电流是最大的,不同电路负载性质对应的电路在通断时能量储存方式有所差别。
1)电阻性电路无储能元件,在电路通断瞬间空气击穿产生电弧,在设计电路时需计算短路电流值,不能超过最小点燃电流。通常采用在回路中串联限制能量的电阻,发生短路时其产生的能量不至于引燃爆炸性气体。
2)容性电路具有储能的特点,在暂态过程中其作用与电源类似,因此需要严格计算其容量大小及配套电阻值,防止电路通断过程产生危险能量。
3)电感性电路在断开时电感两端有很强的反电势,通常在电感两端并联一个分路来释放或吸收电感能量。
针对整体设计的电路,很难直接判断其电路属性和故障时的电路情况,需通过等效变换等方法将其拆分成多个简单电路进行逐个分析。
1.2 本质安全电路的安全评价
为了达到电路的本质安全要求,电路在测试和改进时需要对电路参数进行测试是否达到评价标准。常用的最小点燃能量评价方法判定电路安全性能,通过演算和推导完成,具有过程简单、周期较短的特点。
通过最小点燃能量的方法进行本质安全评价时,电火花的产生是将电路中电能转化为热量,并散发到燃爆环境中。
电路中的储能元件是电能大量存储和释放的地点,需要根据其具体的参数情况进行能量转换的测试和计算,如果未能达到本质安全评价的要求,则需要对储能元件进行参数优化及对电路结构的优化。
计算电火花能量时可以分析电路开断瞬间的能量变化情况,此时的变化量是最大的,只要在电路切换的瞬间满足本质安全评价要求,则能证明电路时本质安全的。计算放电能量时,需要在一段时间内对电压时间函数和电流时间函数的乘积进行积分,得到的结果小于最小点燃能量即为满足本质安全的求。如果该电路不含电阻元件,放电能量的计算方法为:

对于本质安全电气设备来讲,其正常工作或发生短路故障时,瞬时能量值上限为0.28 MJ,这样才能保证安全火花。设计电路时要对电感、电容等储能元件采取消除能量的措施,例如在电感上并联二极管。为达到电路本质安全的要求,也需要对电路采取限流、限压措施,同时防止其他来源的能量进入本质安全电路,限制电火花能量到要求范围内。
2 矿用本质安全的超声预警系统
2.1 煤矿井下超声测距预警原理
煤矿井下地形狭长、光线条件差、设备种类繁杂、活动空间小、道路错综复杂,驾驶员在车辆驾驶过程中受昏暗灯光条件、高低不平行驶道路、未知的前方路况以及自身长时间驾驶引起的疲劳和不集中等因素影响,极易引起煤矿井下的车辆事故。在煤矿井下进行的倒车作业,会受到对路况的感知和判断、倒车系统辅助规划路线和倒车系统等多方面综合影响,如图1 所示。

图1 倒车过程分析
在进行倒车操作中,要同时考虑驾驶员的判断和执行程度与矿用车辆的车辆状况。驾驶员在确定方位时,如果仅凭自身的视觉和听觉来判断路面状况,是很难做到将所有有效信息捕捉完全。驾驶员需要通过其他辅助装置来帮助自己判断和确认路况信息,在此基础上进行倒车路线的规划,并完成倒车操作。
为预防倒车过程中可能出现的事故,降低其发生概率,从情况的感知和判断、倒车系统辅助规划路线和倒车系统执行三方面进行优化。为便于驾驶员更清楚地判断周围环境,通过视频配合估算障碍物距离和其他可能影响倒车安全的情况,需对障碍物进行更准确的距离测量。同时应对测量结果进行距离显示并进行障碍物报警,确保驾驶员在能够在有效反应时间内收到准确信息后迅速做出判断和调整。这也有助于提醒驾驶员集中注意力,在制定行车路线时更有把握,更为细致谨慎。为保证测距效果立刻起到有效作用,要尽量缩短系统测量反应时间以及系统结果反馈时间。为满足设备能够在燃爆环境安全正常使用,需要对设备进行本安化处理,并确保其工作性能和效果不受影响。
2.2 本质安全超声测距系统方案
本研究设计的本质安全超声测距系统主要由STC 单片机、驱动电路、超声信号产生及接收电路、信号调理电路、报警与显示电路组成、并对系统特性进行温度校正。单片机负责本质安全超声测距系统统一控制,数据指令的发送、接收以及处理均依靠其来完成。本安驱动电路不能采用传统高压脉冲变压器驱动方式以保证系统满足燃爆环境下本质安全电路要求,采用无变压器方式驱动超声波发射模块。
具体工作原理为超声探头产生40 kHz 频率的高频信号,信号在空间传输过程中遇到障碍物发生反射,反射信号被超声探头接收,进而对信号进行放大、滤波及采集处理,通过单片机进行计算,获得飞行时间,通过超声波在空气中的传播速度及温度补偿算法,计算出距离,通过LCD 屏直观显示距离,并根据设置的报警阈值提示判断是否预警。本安超声预警系统原理图如图2 所示。
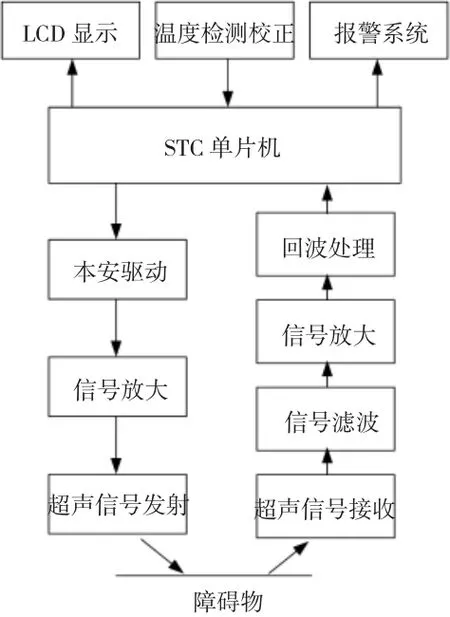
图2 本安超声预警系统原理图
3 结语
研究表明,该本安超声预警系统可以实现在煤矿井下环境的精确位置测量,具有结构简单、成本低、适用范围广、可靠性强等优点。该本安超声预警系统为煤矿井下矿车运输安全提供了新的技术保障与支持,提高了运输矿车安全水平,保障了矿车、工作人员、机电设备等安全,具有广泛的应用前景,可产生显著的社会效益。该系统在测距和预警方面成效显著,但缺乏更直观的实时视频影像系统,不能帮助驾驶员更有效判断周围情况。接下来的研究方向是在完善本安超声预警系统的基础上,研发更先进的本质安全影像系统,以满足煤矿预警系统更进一步的要求。