经验模式分解在旋转机械非平稳振动信号表征中的应用分析
2022-03-24车文超张国强李文凯
车文超, 张国强, 李文凯
(1.潍坊职业学院机电工程学院, 山东 潍坊 262737;2.中国人民解放军95979 部队, 山东 新泰 271207)
引言
旋转机械广泛被应用于各类机械装备,占到机械装备的80%以上[1-2]。在机械装备中,旋转机械起传递动力的作用,属于核心部件。但由于旋转机械通常工作于非平稳和高负荷工况,易出现故障[3]。一旦旋转机械出现故障,会降低设备的工作效率,影响产品质量,甚至会导致设备停机或人员伤亡。以振动信号分析为基础的设备状态监测技术为保障设备的健康运行起到了十分积极的作用[4-5]。因此,研究非平稳工况下的旋转机械振动信号表征方法是十分必要的。
对于非平稳信号,其时变特征表征方法主要分为两类。第一类为基于基函数的线性或非线性时频分析方法,如短时Fourier 变换(Short-time Fourier Transform,STFT)、小波变换(Wavelet Transform,WT)和 Wigner-Ville 分 布(Wigner-Ville Distribution,WVD)。基于核函数的时频变换虽可以实现非平稳信号时变特征的表征,但其受Heisenberg 不确定原理或交叉项的影响,无法精确地刻画非平稳信号的时变特征[6]。第二类是以经验模式分解(Empirical Mode Decomposition,EMD)为代表的多分量分解方法。EMD 可以将非平稳多分量信号分解为多个本质模式函数(Intrinsic Mode Function,IMF)[7]。对于单个IMF,运用Hilbert 变换、能量算子、归一Hilbert 变换等估计其瞬时特征,最后叠加各分量的瞬时特征,可实现非平稳多分量信号时变特征的刻画[8-12]。
相较于基于基函数的非平稳信号表征方法,以EMD 为基础的分析方法,其优势主要体现在以下两个方面:很强的自适应性,可根据信号的特征自动匹配基函数;分辨率高,可以准确估计每个IMF 每个时刻的瞬时特征[13]。而旋转机械实测到的振动加速度信号为多源激励响应,表现出很强的非平稳和多分量特征[14]。因此,结合EMD 在非平稳多分量信号表征中的优势和旋转机械振动加速度信号的特征,本文运用EMD 来表征旋转机械非平稳信号的时变特性。此外,对其优势、劣势及适用范围做出了总结,以期为EMD 的使用者提供一定的参考。
1 基于经验模式分解的非平稳信号时变特征表征
1.1 经验模式分解
华裔科学家黄鄂博士开创性地提出了用于多分量信号分析方法EMD。如下页图1 所示,EMD 通过逐步迭代筛分的方式实现了单个多分量信号到一组从高频到低频IMF 和残余分量的过渡。在逐步迭代筛分过程中,运用信号时域局部特征来构造用于筛分的均值信号,使得EMD 具备很强的自适应性,可以很好地匹配信号的时变特征。因此,EMD 不需要提前定义分解参数或基函数,便可以实现多分量信号的分解。多分量信号分解成一组IMF 的目的在于,对于单个IMF 可以运用信号瞬时特征估计技术实现其时变特征的刻画,进而为非平稳信号时变特征的表征提供一种有效手段。
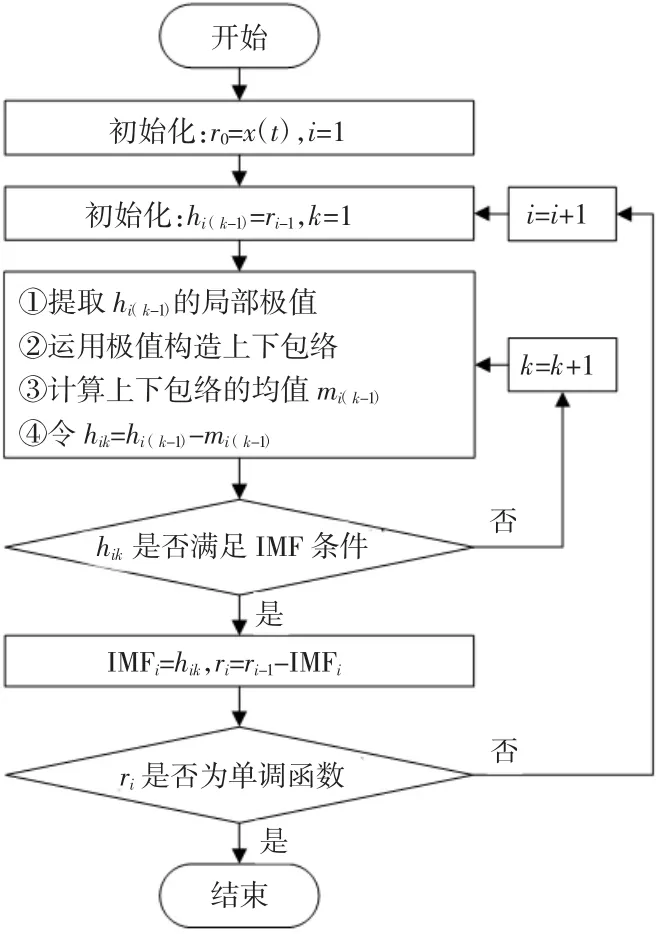
图1 EMD 算法流程图
1.2 非平稳信号时变特征表征
对于EMD 分解得到的IMF 需要进一步进行处理才能达到非平稳信号时变特征表征的目的。由于能量算子、广义过零点、直接正交和归一化正交与经典的Hilbert 变换具有相似的性质,分析结果也比较接近,故本文选用Hilbert 变换估计各IMF 的瞬时幅值和瞬时频率。
首先,运用Hilbert 变换构造分解得到第i 个本质模式函数ci对应的解析信号zi(t)[15-16],如式(1)和(2)所示。
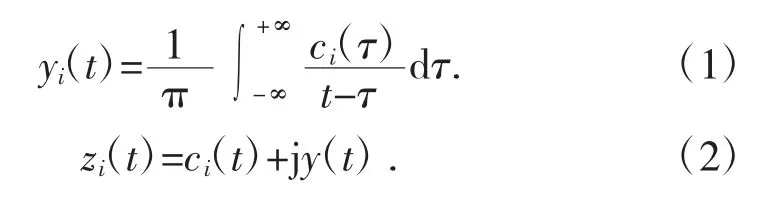
式中:j2=-1。
然后,估计zi(t)的瞬时幅值ai(t)和瞬时频率fi(t),如式(3)和(4)所示。

最后运用估计到的各IMF 的瞬时幅值和瞬时频率构造原始信号的时频分布TFRx(t)如式(5)。

至此,多分量信号的时频分布TFRx(t)被构造出来了,实现了非平稳多分量信号x(t)时变特征的刻画,也为旋转机械振动加速度信号的表征提供了一种手段。
2 数值仿真信号分析研究
本节采用2 组具有不同特征的数值仿真信号来分析基于EMD 的非平稳信号表征方法的性能,以便准确了解EMD 的优点、不足和局限性,为实测旋转机械振动加速度信号分析提供一定的指导。
2.1 分量间隔充分的多分量信号分析
首先分析由3 个间隔充分的分量组成的多分量信号,其表达式如式(6)所示。该数值仿真信号3 个分量的频率分别为f1(t)=10+20t、f2(t)=2f1(t)和f3=4f1(t)。

此处时间(s)t=(1,2,3,…,1 024)/1 024(采样频率为1 024 Hz)。
无噪声情况下,该多分量信号分解出7 个IMF和1 个残余项,取前3 个分量构造的时频分布如图2-1 所示,可见基于EMD 的非平稳信号分析很好地表征了该非平稳信号的时变特征。在该数值仿真信号中加入信噪比为15 dB 的高斯白噪声后,同样分解得到7 个IMF 和1 个残余项,运用前3 个分量构造的时频分布如图2-2 所示。可见,基于EMD 的非平稳信号时变特征表征方法容易受噪声的影响。这是由于:分解过程中,背景噪声容易影响上下包络构造的精度,而迭代筛分是误差累计的过程;通过Hilbert 变换估计瞬时特征的精度高,但鲁棒性较差。可见,EMD 可以很好地实现信噪比高、分量间隔充分多分量信号的分解,并准确表征其时变特征。

图2 分量间隔大的数值仿真信号时频分布
2.2 分量间隔小的多分量信号分析
本小节分析由间隔不充分分量组成的多分量信号,其表达式如式(7)所示,其他参数同式(6)。


无噪声情况下,运用EMD 得到6 个IMF 和1个残余项,同样取前3 个分量构造的时频分布如图3-1 所示。加入信噪比为15 dB 的高斯白噪声,分解得到8 个IMF 和1 个残余项,前3 个分量构造的时频分布如图3-2 所示。对于分量间隔不充分的多分量信号,无论有无噪声,都无法准确刻画其时变特征。这是由于分解过程中,分量间的瞬时频率接近,通过迭代筛分的方式无法将各IMF 准确分离,容易造成模式混叠,最终导致分解效果不佳。可见,EMD要求测试得到的振动加速度信号在信噪比高的基础上还要求分量间的间隔要充分。

图3 分量间隔小的数值仿真信号时频分布
3 实验信号分析研究
对最为常用的也最为典型的旋转机械电动机的振动加速度信号进行分析,电动机的型号为YP-50-4.0-2,其额定功率为4.0 kW,极数为2。如图4 所示,ABB 变频器控制电动机转速,电动机驱动单级减速机,负载约为30 N·m。实验过程中,电动机转子的回转中心与定子的几何中心偏离1.5 mm。电动机右侧正上方布置一个振动加速度传感器来采集电动机的振动加速度信号,信号的采样频率为1 024 Hz。运用基于EMD 的非平稳信号表征方法分析得到的电动机振动加速度信号的时频分布如图5 所示。由于测试得到的振动加速度信号分量间隔较为充分,且信噪比较高,故该非平稳信号的时变特征被准确地表征。

图4 实验台结构简图

图5 电动机转子偏心加速度信号的时频分布
4 结语
旋转机械通常工作于非平稳和大载荷工况下,因此易于出现故障。针对旋转机械多源激励和多分量特性,经验模式分解为该类非平稳多分量信号的时变特性表征提供了思路:经验模式分解在从多分量信号中提取本质模式函数时,各组成分量的间隔必须充分;经验模式分解中上下包络信号的构造易受背景噪声的影响,而产生较大的插值误差;3)Hilbert 变换虽可以实现本质模式函数时变特性的精确表征,但背景噪声也易影响瞬时特征的估计。基于经验模式分解的非平稳信号分析方法适用于分量间隔充分、信噪比高的场合。数值仿真信号和典型旋转机械电动机转子偏心信号验证了上述结论。