园区智能防疫无人驾驶作业车电控系统设计
2022-03-24高艾平陈鑫凯张士强
高 欣, 高艾平, 陈鑫凯, 孙 帅, 吴 珂, 张士强
(河北省智能装备数字化设计及过程仿真重点实验室, 唐山学院, 河北 唐山 063000)
1 引言
新冠肺炎疫情形势严峻且备受全社会关注。 校园、 企业、 居民小区、 市场等封闭园区类区域人员相对聚集, 药物喷洒是目前一种常规的环境消杀方式, 但消杀作业劳动强度大, 对消毒人员安全构成威胁, 且作业难度增加, 作业时间段受限。
本次研发的自动喷洒防疫药物的智能作业车能按照系统设定的时间段、 行走轨迹自动进行指定区域的药物喷洒作业。 操作人员只需按照提示装备作业药物、 设定作业行驶路径, 作业车即可智能自动作业, 同时作业车能监测药物量等状态信息, 对喷洒环境条件进行判断, 自动避障。
2 作业车机械结构形式
2.1 作业车底盘
如图1所示, 作业车采用轮式驱动底盘, 选择4轮驱动电机为动力源, 左右电子差速实现转向, 底盘的主要控制包括前进、 后退、 制动、 转弯等基本功能。
2.2 作业车装备等上装系统
图1上装部分主要包括药物供给系统、 药物喷洒控制系统、 GPS卫星惯导定位系统、 超声波传感器、 激光雷达传感器等; 电控系统主要负责环境感知和药物喷洒作业控制。
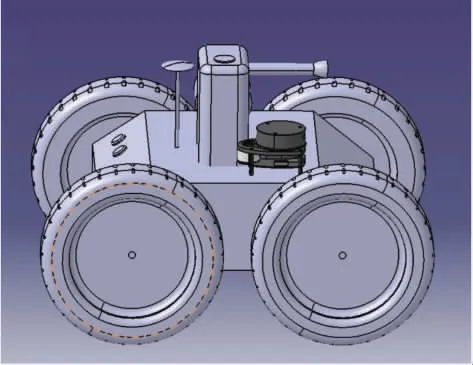
图1 作业车结构形式示意图
3 作业车电控系统设计
电控系统采用电子线控方式, 功能上包括运动控制系统、 感知系统、 执行系统等。 整个电子电气控制系统包括VCU、 感知、 执行等, 系统拓扑如图2所示。
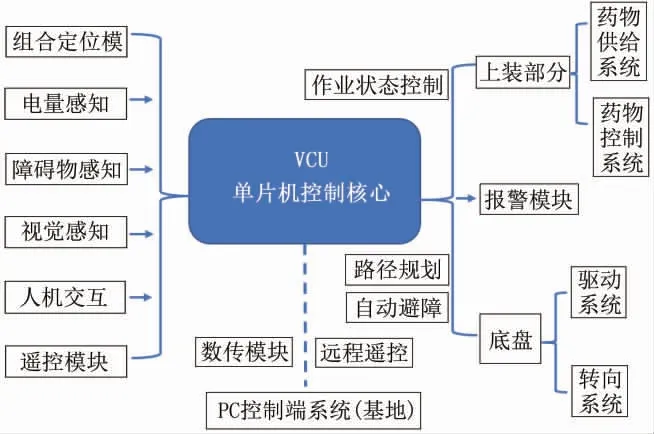
图2 电子电气控制系统结构拓扑图
3.1 VCU控制核心
单片机控制核心选择Pixhawk作为整车控制单元VCU,Pixhawk 是一款透明且可以二次开发的硬件, 其内置2 个STM32 系列芯片, 其中STM32F427 芯片是主控制器,STM32F103芯片作为协处理器在主控制器发生故障时可以继续运行程序, 板载加速度计、 陀螺仪和气压计等传感器。
3.2 感知系统
GPS全称为全球卫星导航系统, 通过感知作业车地理坐标位置信息, 实现路径规划功能。 本设计选择的GPS为M8N 电 子 罗 盘, 如 图3~图5 所 示, 它 的 定 位 精 度 误 差 在50cm左右, 工作电压为5V, 更新速率为1kHz。 GPS模块的4个引脚分别与Pixhawk中的VCC、 TX、 RX、 GND相连, 另2个引脚分别与CAN中的CAN_H和CAN_L相连。

图3 Pixhawk实物图
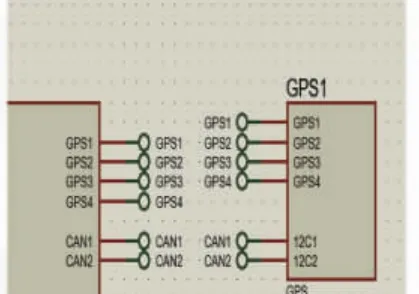
图4 GPS连线示意图

图5 GPS实物图
本设计将4个传感器布置于车头和车尾, 为避免由于超声波安装过近导致一个超声波接收到另一个超声波回波的情况, 不适宜安装较多的超声波传感器。 超声波传感器安装与电气原理如图6所示。 由于Pixhawk接口有限, 因此我们将IC接入一个集线模块ATmega2560, 使一个IC接口可以插入4个超声波传感器。
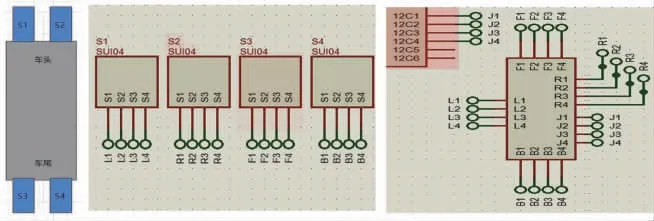
图6 超声波传感器安装与电气原理图
3.3 驱动与转向系统
驱动电气原理如图7所示, 系统通过脉宽调制来控制直流无刷电机转速, 本设计对4个驱动电机分组为左、 右两组, 智能车左或右2个电机为同一电调控制, 因此只配置2个电调控制, 电机转速通过电调控制, 电调受控于Pixhawk控制器。 控制原理为Pixhawk输出某占空比的PWM信号用来控制电调引脚的开关信号。 控制电调引脚开关信号再发送给电机, 控制电机正反转和转速。 而本设计中, 底盘需要实现左转、 右转、 前进和后退4个功能, 前进和后退依靠占空比改变直流无刷电机的正反转, 左转和右转通过改变左右2个电机的占空比, 左边电机的占空比低于智能车右边电机的占空比时, 左轮的转速低于右轮的转速, 智能车实现左转。 反之, 底盘实现右转。
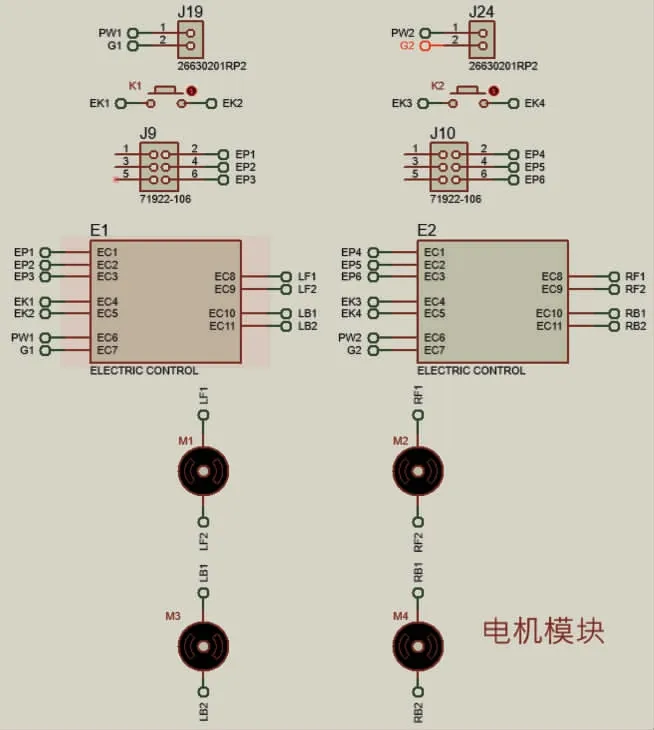
图7 驱动电机及电调电气原理图
3.4 数据传输模块
数据传输模块主要是为了完成作业车与Mission Planner地面站通信任务, 实现实时对车辆数据信息的监测, 确保Mission Planner 地面站发布的命令作业车可以接收。 系统采用的是3DR 无线数传,如图8所示, 其具有传输距离远、 体积小巧、 方便等优点,3DR数传的一端与PC端相连, 另一端与Pixhawk板相连, 既可以向PC端发送位置信息, 又可以接收PC端指令完成指定功能。

图8 数传模块工作示意图
4 作业车系统调试
4.1 作业车地面站软件
系统采用Mission Planner地面站软件与Pixhawk相配合,选择高德地图进行路径规划、 下载固件、 传感器初始化、参数标定和行驶状态检测等功能。 软件界面如图9所示。
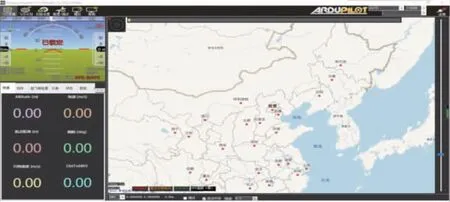
图9 Mission Planner地面站
4.2 参数标定与试验
如图10所示, 系统采用GPS单元和IMU单元感知车辆位姿作为PID的反馈信息。 如图11所示, 进行PID调参, 首先将I和D的值归0, 然后对P值进行设置, 设置原则根据先小后大, 且不能太大, 如果P值过大, 在实验中发现, 智能车行驶路线会与规划路径相差较多, 智能车会因为惯性在路线左右多次往返运动; 如果P值过小, 智能车的反应会变慢; P值适中, 智能车也会因为惯性在路线左右往返运动,但误差会逐渐减小, 经过多次往返运动后, 小车会在路线上行驶。 然后, 为了控制比例环节的过调, 设置微分参数D, 合适的D值会让智能车更容易到达规划路线上。 合适的P值和D值, 可以在平坦路面上行驶, 但如果路面崎岖,智能车会发生偏转, 比例和微分控制环节会让智能车在一段时间回到正常航线, 为缩短此时间, 配置积分控制参数I。 合适的I值, 会对误差和误差经历的时间做积分运算,输出更合适的PWM信号, 让智能车回归轨迹。
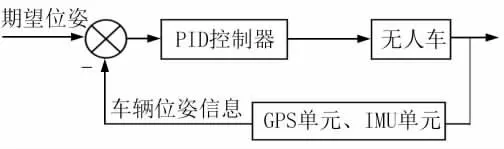
图10 PID参数调整图
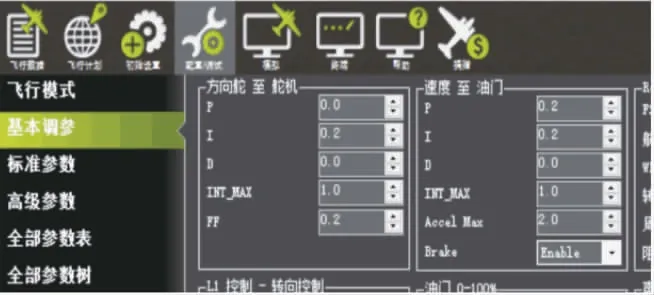
图11 PID调参界面
图12为调完PID的值后智能车的规划路径和行驶路径。经过PID调参, 智能车的行驶路径已经可以和规划路径基本重合, 验证了智能车已经可以在校园环境下自动行驶。 智能作业车可以有效减轻人工投入, 提高作业速度, 便于实现多频次、 定时消杀, 尤其是疫情严重地区, 进行有效的药物喷洒工作, 能够有效地避免人员与有害环境的接触。

图12 路径规划试验
5 结论
本次研究的智能防疫无人驾驶作业车机械结构由通用电动线控底盘加上装作业部分组成, 电控系统采用Pixhawk飞控作为控制核心, GPS和陀螺仪位姿信息作为轨迹控制的反馈, 超声波传感器负责障碍物检测, 车辆转向设计为电子差速转向, 经过PID调参调试, 能实现封闭园区的规划路线的自动行走和消杀防疫作业, 未来会进行环境感知的进一步研究, 以适应更复杂的作业环境。
