信控交叉口电动汽车驾驶行为特征分析*
2022-03-23毛喆胡宸黄衍
毛 喆 胡 宸 黄 衍
(1. 武汉理工大学智能交通系统研究中心 武汉 430063;2. 武汉理工大学国家水运安全工程技术研究中心 武汉 430063)
0 引 言
随着能源的日渐枯竭,以电动汽车为代表的新能源汽车保有量持续增高。根据中国汽车工业协会发布的汽车全年产销数据,我国2020年全年各类型汽车的总销量是2 531.1 万辆,同比增速约2%。其中新能源汽车销量是136.7 万辆,同比增长了10.9%,电动汽车的销量约为111.5万辆,其占新能源汽车总销量的主要比重,增长速度超过10%。相比之下,传统燃油车的销量不增反降[1]。由于《新能源汽车产业发展规划(2021—2035年)》的发布,预计至2025 年电动汽车的销量将持续增长。至2018 年底我国新能源汽车万车事故率为5.69次/万车,万车死亡率为1.06人/万车;至2019年底万车事故率陡增到11.59次/万车,万车死亡率也随之涨到2.10人/万车;而这2项数据在2020年底又分别上涨到12.47次/万车和2.11 人/万车[2]。从上述数年的数据统计可知,新能源汽车事故数以及死亡人数的年平均增长率高达171%和157%,每一年都保持上升的趋势。
道路交叉口作为交通事故发生率较高的场所之一,由于其复杂多样性一直对驾驶人及其驾驶行为提出很高的要求。所以,出现在道路交叉口的车辆运行状态和驾驶行为等也一直是业界诸多学者们感兴趣和研究的方向。唐克双等[3]通过对交叉口的车辆运行状态进行视频拍摄,提取交叉口相位切换期间的加减速变化行为,利用加减速度、加减速度变化率等指标在识别车辆危险驾驶行为同时进行分类,并对其特征进行分析。冯仁科等[4]通过实车实验采集车辆的各类数据及驾驶人的心生理反应,将二者关联起来,建立了驾驶人在交叉口时车辆最大减速度与心生理变化的关系模型,并对车辆通过交叉口危险程度进行分级。Almallah 等[5]通过信号交叉口的监控视频采集到的数据,分析了车辆刚通过交叉口时加速期间的数据,建立关联,分析其互相作用的原因。魏福禄等[6]采集了信号交叉口左转车辆的相关数据,从道路线形的角度来研究车辆在交叉口的运行状态,得出结论:随着转弯半径的增大、车辆速度也会相应增大。白婧荣等[7]结合实际车辆行驶环境,以是否存在纵向减速标线为变量,采集山区城市道路不同交叉口的道路条件、交通状态、车辆状态、驾驶人生理指标等数据,对二者进行对比分析,发现2种不同类型的交叉口的交通安全性有所差异,纵向减速标线的设置有利于提醒驾驶人在到达交叉口前作出减速动作,控制车速,提升交叉口安全性。Zhu等[8]以车辆的加速减速行为为研究对象,分析了当信号相位切换时车辆的加速减速状态,为了消减信号相位切换对交通状况造成的不良影响,建立模型对车速进行优化。江泽浩[9]采用模拟驾驶实验研究了绿灯倒计时对机动车微观驾驶行为影响,通过随机效应Logistic 模型,证明速度、距离等对车辆决策行为有显著影响。雷朝阳等[10]针对信控区的通行延误高和效率低的问题,通过多目标粒子群算法获得最优车速,建立了车速引导模型,并对其进行验证。Liao 等[11]采用最优控制思想,对交叉口类型和减速行为进行分类,利用分层控制,研究不同类型下的交叉口的减速停车行为,并构建了表征不同类型交叉口的驾驶行为模型。Aswad-Mohammed[12]采集了驾驶人的视觉数据,对信号交叉口的视觉注意力进行研究,将其与停车时间、车头时距以及跟车类型进行关联,从而分析出生理状态与驾驶行为间的相互作用。为了对驾驶人加速过程进行研究,Wallace 等[13]提取加速事件中的加速度值,研究最大加速度与平均加速度之前的关系;Bosetti 等[14]对纵向加速度与速度之间的关联性进行了分析。
由于电动汽车与传统燃油车在动力构造上的不同,导致其驾驶人驾驶车辆时表现出的驾驶行为不尽相同。速度与加速度是最为直观表现车辆微观运动的特征参数。现阶段信控交叉口的驾驶行为的研究对象以传统燃油汽车为主,未考虑电动汽车的特殊构造对驾驶人在信控交叉口的驾驶行为产生的影响,因此本研究对于抵近到驶出信号交叉口时电动汽车驾驶人的驾驶行为与其表现出的特征进行分析,为跟驰模型及微观交通仿真提供参数的标定值,对电动汽车混行交通的安全管理具有一定的参考价值。
1 自然驾驶数据采集
1.1 实验设计
1.1.1 实验车辆选择
在自然驾驶实验中,为了充分考虑车辆运行过程的随机性和行驶路段的多样性,本文主要考虑的电动车辆类型为出租车与网约车。经过调研发现,武汉市普通网约车的年平均行驶里程一般为50000~120000km,月均行驶里程为4200~10000km;出租车的年平均行驶里程为80 000~100 000 km,月均行驶里程较为稳定,一般为7 000~8 000 km,相比较而言,网约车出车率浮动较大,存在待出租的闲置情况,相比较之下出租车出车率更稳定。因此,本文选择某出租公司20 台镍钴锰酸锂电池的纯电动出租车作为实验车辆,如图1。

图1 实验车辆—纯电动出租车Fig.1 Experimental vehicle-pure electric taxi
1.1.2 被试人员选择
参与本次自然驾驶实验的被试人员筛选标准如下:
1)有驾照,驾龄在5年以上,并且熟知交通法规。
2)身体健康,最近5年内无重大疾病史。
3)无酗酒等不良嗜好。
根据上述筛选条件,选择了20 名被试人员(其中,男16名,女4名)参与本次实验,被试人员具体的人口统计学特征见表1。
表1 被试的人口统计学特征Tab.1 Statistical characteristics of experimenters
1.1.3 实验过程
根据前文的分析,确定了实验车辆与被试人员,本次实验为自然驾驶实验,在武汉市市区内城市道路上开展。实验过程中不对实验路线进行具体限定,亦不告知被试人员实验目的,驾驶过程不对被试进行额外的操作规范限定,不对被试的驾驶行为做任何干预,均属于被试自然驾驶习惯下的行为。被试自由驾驶实验车辆,在城市道路上行驶。车辆启动时,数据采集设备自动通电开启,车辆运行数据开始采集,车辆熄火时,数据采集设备自动关闭,停止数据采集。
1.2 实验数据采集与提取
1.2.1 数据采集与存储
高质量的数据信息能更好地反映车辆的瞬态信息,本研究通过定制开发的高级驾驶辅助系统(advanced driving assistance system,ADAS)对驾驶行为数据进行采集。该系统通过接入车辆CAN 总线获取本实验所需的驾驶行为数据,包括车速和纵向加速度等,采集频率为10 Hz,并以txt 文件格式保存;ADAS中的摄像头同时采集车辆行驶时交通环境的连续视频,视频数据以mp4文件格式保存。同时,驾驶行为数据与视频数据可通过采集/拍摄时间进行同步。
1.2.2 数据采集
本次自然驾驶实验共收集了20台实验车辆,5 d内在市区内自然驾驶的数据,剔除部分缺失的数据,本次采集数据总时长共计396 h。由于本实验场景为信号灯控制的路口,因此对获得的数据进行片段提取。实验中车辆驾驶行为分析阶段的数据提取片段见图2,t1至t2时间段为减速时间,即车辆在达到停止线前,车速由停止前峰值降为0的时间段,t2至t3为车辆在停止线前等待的时间,t3至t4为车辆由停止线启动加速,速度由0 达到启动后峰值的时间段。根据完整的加速、停止、加速过程共提取数据片段430条。
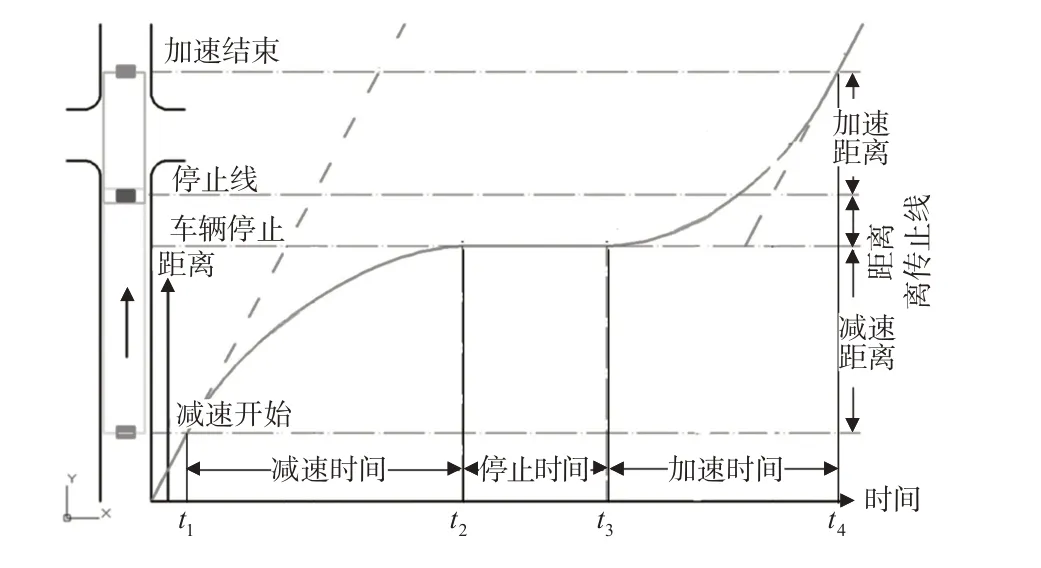
图2 车辆驾驶行为分析阶段Fig.2 Vehicl e driving behavior analysis stage
1.2.3 数据筛选
交通堵塞情况下道路交叉口的实验数据不在本次的研究范围内,原因在于发生交通堵塞时,被试驾驶人会频繁及无规律的切换操纵加速踏板和制动踏板,而此类加减速行为受到道路交叉口实际拥堵状况、前车行驶状态、驾驶人实际驾驶判断的影响更大,导致在此种情况下无法较为准确的反映出驾驶人的自然加、减速行为特征,故该段实验数据可不纳入分析范围。当被试在信号交叉口等待通行时,如停止线前有其他车辆在等待,当绿灯变亮后,被试的驾驶行为受前方车辆行驶状态干扰较大,因此只保留被试驾驶的车辆位于信号交叉口车辆停止线第一位的实验数据。获取实验片段后,对照ADAS 中的摄像头获取的视频数据,根据以上标准,人工进行片段筛选。实验片段中主要包含车辆在运行过程中的速度、加速度等数据,通过确定了汽车在交叉口的停车点位,即车速曲线为零的点位,截取其前后的速度曲线波峰点分别作为减速行为开始点和加速行为结束点,此为车辆在信号交叉口的数据采集范围,如图3。通过以上标准进行筛选后,最终共筛选出96条减速数据和78条加速数据。
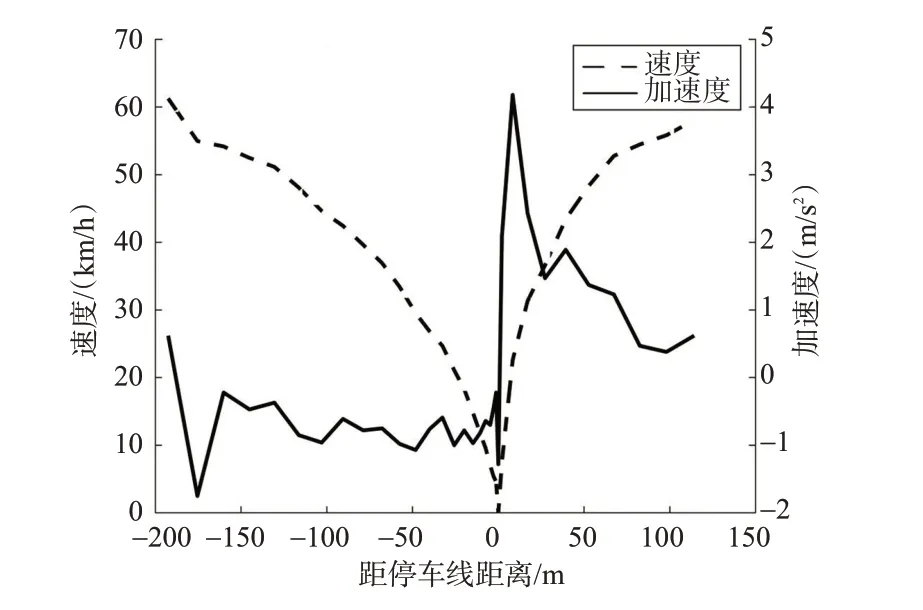
图3 信号交口速度加速度数据示例Fig.3 Example of speed and acceleration at signalized intersection
2 信号交叉口电动汽车纵向加速度特征分析
本文主要研究内容为电动汽车驾驶人在信号控制交叉口时的车辆加速起步和减速停车的驾驶行为,利用汽车在交叉口的纵向加、减速度值,将驾驶人在进入信号控制交叉口后的驾驶行为分为加速行为与减速行为。
2.1 纵向加速度累积频率分析
将实验中采集的被试在信号交叉口减速至停止与从停止到起步加速的过程中的纵向加速度进行平均计算,得到被试在通过信号交叉口过程中的平均减速度、平均加速度值,同时提取整个过程中纵向加速度的峰值加速度、峰值减速度,按照绝对值大小排列后绘制平均加/减速度和峰值加/减速度的累积频率曲线,如图4 所示。由图4 可知:整体减速度累积频率曲线均高于加速度累积频率曲线。当累积频率较低时,平均减速度与平均加速度有重合部分,随着累计频率的增高二者之间的差距逐渐缓慢增大,而峰值加速度则始终大于峰值减速度。电动汽车在加速过程中电机的转速转矩特性使电机在不需要预热的情况下直接启动,并且很快达到需求转速,达到较高的加速度,因此加速度的值会大于减速度值[15-16]。
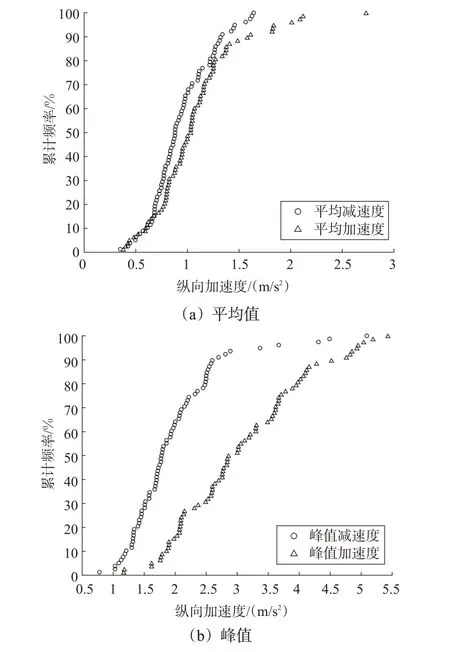
图4 信号交叉口纵向加/减速度累计频率曲线Fig.4 Cumulative frequency curves of longitudinal acceleration at signalized intersection
龙岩松等[17]利用传统燃油车的自然驾驶实验数据,观察车辆在信号交叉口的加速度特性,其结论为平均值、峰值减速度累积频率曲线均低于加速度累积频率曲线。减速度的幅值主要是由路面摩擦系数决定,而加速度幅值由发动机输出扭矩和传动扭矩决定,对于传统燃油车来说,其能够达到的最大加速度远小于最大制动减速度。该结论与本研究结论完全不同,说明电动汽车与传统燃油车在动力构造上的差异导致其驾驶行为亦存在差异。电动汽车具备的动力回收系统,使得部分驾驶人会依赖动力回收系统,减少踩刹车踏板频率和次数而达到车辆减速效果[18],在动力回收系统和制动系统的双重作用下达到平稳驾驶目的。
2.2 纵向加速度概率分布分析
实验中采集了在信号交叉口减速至停止与从停止到起步加速的过程中,被试驾驶车辆的纵向加速度数据,并绘制纵向加速度概率分布曲线,如图5所示,平均加速度、平均减速度曲线均呈正偏态分布,平均减速度与峰值减速度的概率分布曲线中的偏好值均小于平均加速度与峰值加速度的偏好值。纵向加速度值较小时,减速度大于加速度值;然而纵向加速度值较高时,加速度值高的概率大于减速度,这说明电动汽车驾驶人加速过程中更容易采用较高的加速度值,这与电动汽车动力构造特征密不可分。龙岩松等[19]在针对燃油车的研究中发现,当纵向加速度超过偏好值时,减速度明显大于加速度,与本研究的结论相反。
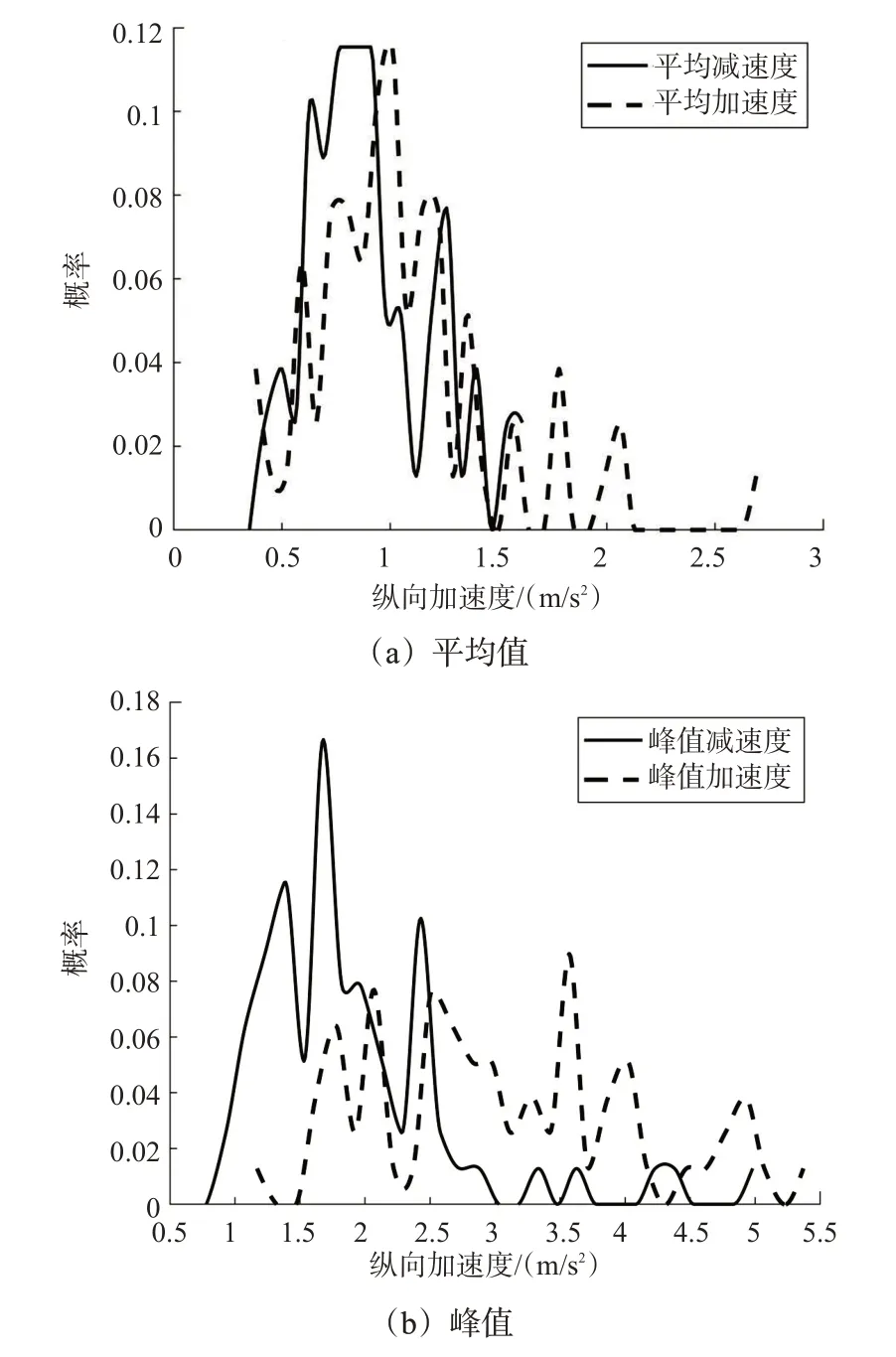
图5 纵向加/减速度概率分布曲线Fig.5 Probability distribution curves of longitudinal acceleration
2.3 纵向加速度特征值分析
通过获得的纵向加速度数据,提取其统计值和特征分位值,见表2。纵向加速度的特征分位值可以为信号交叉口微观仿真提供参数标定参考值,也可以为城市道路运行速度模型中加、减速度的参数标定提供一定的参考。

表2 纵向加速度的统计值和特征分位值Tab.2 Statistics and characteristic percentiles of longitudinal acceleration单位:m/s2
目前,各类道路交通设施的设计均采用第85%分位的驾驶行为参数作为控制依据,大多数学者对驾驶行为的研究也是基于第85%分位值,理由是用于描述驾驶行为的速度、加速度等参数的累积频率曲线斜率一般在第85%分位发生突变[20]。对本文图4中的累积频率曲线的斜率进行计算,在第85%分位左右平均加速度累积频率曲线的斜率产生不平稳的变化,意味着大于此位置平均加速度的数据较少。而平均减速度、峰值加速度、峰值减速度的累积频率曲线斜率突变点均为第90%附近。因此,对于电动汽车而言,采用第85%~90%分位的特征值对信号交叉口纵向加速度进行表征。
本节从纵向加速度的累积频率、概率分布和特征值3 个方面进行分析,通过累积频率可以得知驾驶人在信号控制交叉口加减速行为的纵向加速度值的中位值等不同的分位值,对道路设计、仿真参数标定都具有研究意义,概率分布则表征了电动汽车驾驶人加速度的概率,反映出电动汽车驾驶人的偏好,也从侧面表现出电动汽车的动力学特性。
3 信号交叉口电动汽车速度特征分析
3.1 速度与距停止线距离关联分析
抵近信号交叉口时,车辆的减速行为是驾驶人根据道路状况、停车距离进行预判,而使得车辆能够安全稳定的在停止线前速度降为0的过程。提取所有被试驾驶人在信号交叉口前的减速初速度和减速距离,绘制散点图,并对散点数据进行线性拟合。减速距离与初速度关系拟合见式(1),其相关系数R2=0.679,加速距离与稳定速度关系拟合见式(2),其R2=0.683。
如图6(a)所示,当初速度为较低水平时,速度点集中在拟合线型的附近,当初速度逐渐增大时,散点的离散程度也随之增大。当初速度越大时,所需要的减速距离越长,在减速过程中,速度的变化差异性增大,因此初速度越高,散点的离散程度越大。原因在于:速度较大时,驾驶人对距离的把控更加敏感,在距离停车线仍有一定距离时会提前开始减速行为,且驾驶人会依据前车的加减速行为对本车速度进行调整。此结论与张高峰等[21]利用无人机采集的城市交叉口交通视频数据得出的车辆时空图中结论一致,车辆距停车线越近,即减速距离越短,其减速初速度越小。
远离信号交叉口时,车辆的加速行为是1 个加速度持续变化直到达到稳定的行驶速度的过程。如图6(b)所示,当稳定速度较低时,散点的分布较为集中,与较高的稳定速度水平相比当速度达到中等水平时,稳定速度与加速距离的散点反而更加分散。原因在于:加速距离短时,表明此时交叉口交通流较大,驾驶人为保证安全,无法长时间持续加速,稳定速度为中等速度时,加速距离散点较分散,意味着此时道路交通状况对加速距离的影响较大,散点在速度为40~60 km/h区间分布密集,表明此为城市道路的合理车速。

图6 速度与距停止线距离关系Fig.6 Relationship between speed and distance from stop line
3.2 速度与加速度关联分析
将所有被试车辆的行驶速度与纵向加速度实测数据绘制散点图,并绘出第5%,50%,95%分位加速度曲线,如图7。由图7 可知:信控交叉口整体纵向加速度呈椭圆分布,当车速较低时,随着车速的增大,制动减速度也在增大,各散点逐渐发散,当速度逐渐增大时,减速度处于波动的状态,缓慢减小;与此相似,当车辆逐渐加速驶离信控交叉口,速度较低时,随着车速的增大,加速度也在逐渐增大,车速处于中高速时,加速度以波动的状态缓缓减小。由此可知:电动汽车驾驶人刚离开停止线,开始加速时,趋向以较高的加速度开始加速,以求在更短的加速时间内达到平稳的行驶状态,而在速度达到较高时,加速度减小,此时的车辆已经趋近稳定的行驶状态,只需以较小的加速度以适应交通状况的变化。当电动汽车驾驶人逐渐抵近信号交叉口时,会首先采用较小的减速度,由于速度较快,此时离信控交叉口距离尚远,较小的减速度能够使速度平稳下降,接近停止线时根据实际状况会采用合适的较大减速度,使车辆完全停止,以防过线。
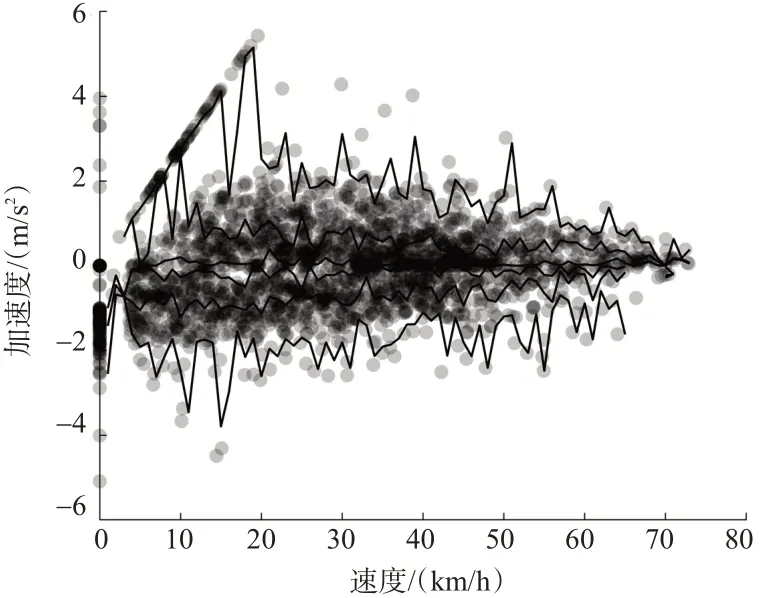
图7 纵向加速度分布随速度变化关系Fig.7 Relationship between longitudinal acceleration distribution and velocity
4 结束语
本文通过电动汽车自然驾驶实验数据,对电动汽车驾驶人在信控交叉口的驾驶行为进行了一定的分析,得到以下结论。
1)电动汽车驾驶人更易在加速过程中采用更高的加速度。当累积频率较低时,平均减速度与平均加速度有重合部分,随后二者之间的差距随着累计频率的增高逐渐缓慢增大,而峰值加速度则始终大于平均加速度。这是由于电动汽车在加速过程中电机的转速转矩特性可以使电机在不需要预热的情况下直接启动,并且很快达到需求转速,达到较高的加速度。
2)在第85%分位左右平均加速度累积频率曲线的斜率产生突变,而平均减速度、峰值加速度、峰值减速度的累积频率曲线斜率突变点均为第90%分位附近。因此,对于电动汽车而言,建议采用第85%~90%分位的特征值对信号交叉口纵向加速度进行表征。
3)驾驶人在信控交叉口减速与加速行为与实时速度和离停止线的距离都有较为明显的关系。且在接近和刚远离停车线时电动汽车驾驶人都偏好采用较高值的纵向加速度。
道路交叉口的交通安全提升对于道路安全具有重要意义。本文对于信控交叉口电动汽车驾驶行为的研究中,纵向加速度的特征分位值可以为信控交叉口微观仿真研究中提供参数标定参考值,在电动汽车混行交通安全管理法及道路设计规范的制定提供借鉴。本研究中未考虑道路参数对电动汽车驾驶行为的影响,且因为各方面条件的制约,参与到实验中以作为样本进行统计的总量较少,在后续的研究中将从不同的道路类型来对电动汽车驾驶人在信号控制交叉口的驾驶行为进行分类研究,并扩大样本数量,以期获得更为准确的结论。
