动态分组策略在大学生机器人教育中的应用*
2022-03-23钟柏昌黄水艳
钟柏昌 黄水艳
(华南师范大学 教育信息技术学院,广东广州 510631)
作为人工智能在教育应用中的典型,机器人教育表现出了重要的教育价值和发展前景,尤其有利于合作能力、问题解决能力等核心素养的培养[1]。在国际范围内,机器人教育普遍强调基于项目的合作学习[2]。合作学习的影响因素众多,如互动模式、小组规模、分组策略等,其中分组策略至关重要。在传统合作学习中每个小组的成员一般维持不变,即所谓静态分组。然而近年来的一些研究表明,学习者的学习状态并非一成不变,静态分组可能会造成一系列问题,如搭便车现象与旁观者效应[3]、角色固化[4]、负面的小组思维效应[5]、合作倦怠[6]等。究其原因,主要在于静态分组忽略了小组条件(如异质性水平、合作融洽度)随时间的变化[7]。因此,教师在教学过程中必须对小组进行不间断的检查,并在必要时进行调整。有研究者发现,采用动态分组策略可以显著提高小组的集体认知责任和学习成绩,以弥补静态分组的不足[8][9]。遗憾的是,国内机器人教育乃至相关的科技创新教育、STEM教育中鲜有以动态分组作为分组策略的相关研究,那么在机器人教育中引入动态分组策略是否可行?对此,本研究拟采用准实验研究法来尝试回答这一问题。
一 动态分组在教育中的应用综述
动态分组是指在合作学习中对小组成员进行重组,以实现预定的教学目标[10]。当前,动态分组的相关研究集中在学习效果和分组策略两个方面。
1 学习效果
关于动态分组对学习者学习效果的影响,主要涉及学业成就、合作能力和学习积极性等维度。从学业成就来看,多名研究者认为,相较于静态分组,动态分组可以更加有效地提高学习者的学习成绩[11][12][13][14][15][16][17];同时,动态分组可以提高学习者的集体认知责任,并促使学生产生更高水平的问题和想法[18][19]。而Aronson等[20]认为,经过一段时间的学习,动态分组有助于学习较差的小组成员重启小组学习。动态分组策略给予了学生选择成员的权力和自由,有利于促进从“以教师为中心”的教学转向“以学生为中心”的学习。从合作能力来看,Chen等[21]发现,动态分组更有助于提高学习者的合作能力,这能反映学习者在合作过程中进行协调、讨论并最终与其同伴达成共识的努力水平;Chuang等[22]则发现,动态分组策略能够帮助低成就者找到更合适的合作者。除了直接指向学习层面的合作能力,学习者在动态分组的过程中通过组间交流互动,还能锻炼更具普适价值的合作能力——人际沟通与交往能力。例如,Jong等[23]认为,相对于静态分组的学习者,动态分组的学习者在学习和社交方面表现良好;Zurita等[24]发现,小组的动态形成显著改善了学习者学习和社交行为的质量与数量,这些行为包括交流、互动、帮助、谈判等。从学习积极性来看,Jong等[25]通过课堂观察发现,相较于静态分组,动态分组的学习者能更为积极、主动地参与小组讨论;Oakley等[26]认为,重组学习小组主要是为了解散功能失调的小组,以有针对性地调整并重组为更能有效合作的小组。
当然,动态分组也可能会引发一些负面效应:一方面,师生需要花费大量的时间和精力[27],并有可能增加学习者的认知负荷;另一方面,小组成员多次调整导致学习者失去小组归属感或联系感[28],这在高竞争性的合作学习中可能会带来更大的负面影响。总的来说,已有研究主要探讨动态分组对学习效果的影响,目前还缺少将动态分组应用到更加注重合作学习的机器人课程方面的研究;在学习效果的比较上,学生合作能力的改变无疑是一个关键变量,然而现有的研究仅笼统地检验了动态分组对合作能力的影响,而未作进一步的细分研究,缺少对合作倾向、合作融洽度和群体凝聚力等深层因素的探索。基于此,本研究尝试以合作倾向、群体凝聚力和合作融洽度作为因变量,来探究动态分组对学生学习机器人课程的影响。
2 分组策略
当前,计算机支持的合作学习(Computer-Supported Collaborative Learning,CSCL)已经成为动态分组研究的核心领域。研究者纷纷在CSCL环境中尝试利用平台,并结合不同算法,进行动态分组方法的改良和创新[29][30][31][32][33][34][35][36][37][38]。然而,这些分组算法具有一定的技术难度,不利于在常态课中进行普及与推广,但动态分组的一些具体做法可为本研究的开展提供借鉴。例如,在小组规模方面,Chuang等[39]、Chen等[40]都以两人配对学习方式开展动态分组;在分组标准方面,结合汉明距离异构分组算法,Chen等[41]提出了多维动态分组策略,以认知风格、性别和知识水平作为分组标准;在动态分组时机或触发条件方面,Jong等[42][43][44][45]、Chan等[46]将学习过程分为多个阶段,每个阶段结束后进行小组重组。另外,Wu[47]提出了两阶段合作学习策略:第一阶段精确分析学生的知识结构,以便于第二阶段动态分组时开展异质分组。综上可知,目前影响动态分组策略的关键因素主要有分组的人数规模、分组标准和触发条件等,其中区别于静态分组的主要维度是分组时机、触发条件和调整频次。
遗憾的是,以上动态分组研究侧重于信息学、计算机科学等学科,而在机器人教育乃至相关的科技创新教育、STEM教育中尚缺乏相关的研究。而就国内而言,动态分组研究成果更为鲜见,有待后续的进一步研究。
二 研究设计
1 研究目标与研究问题
本研究重在构建大学生机器人教育中的动态分组策略,并从学习态度、合作能力、学业成就等三个方面探究此策略的应用效果。其中,学习态度用来检验开展动态分组后学生的学习积极性;合作倾向、群体凝聚力、合作融洽度是表征合作能力的三个重要维度;而机器人课程的学业成就主要体现在工程设计和编程能力方面。
结合上述研究目标,本研究将重点回答以下问题:动态分组策略对学生学习机器人的学习态度、合作倾向、群体凝聚力、合作融洽度、工程设计和编程能力是否有显著影响?
2 实验对象
为回答上述问题,本研究以广东省H大学教育技术学专业参加选修课“中小学STEM与创客”课程的18名(含1名男生、17名女生)大二学生为研究对象。先前知识测试结果显示,这些学生大多没有机器人相关课程的学习经验,即不具备工程设计和编程能力。
3 实验材料
在教具方面,本研究选用了DFRobot探索者D1教育机器人以帮助学生认识机器人相关的各种机械和电子零件。
在教学材料方面,本研究选用教育科学出版社于2020年出版的《信息技术选择性必修6:开源硬件项目设计》一书作为教材,因为此教材内容对于在高中阶段尚未学习过相关开源硬件项目设计的学生而言更容易上手。本研究摘选此教材中第一、二单元的项目进行基础知识教学,还设计了“无聊的盒子”、“智能快递车”两个原创项目。与此同时,本研究制作了配套的学习任务单,主要分为四个部分:体验作品、还原作品、再设计与微创新、作品测试。其中,“再设计与微创新”为学习任务单的核心部分,主要内容包括:①从不同角度设计3~4个作品改造方案;②小组讨论确定最终方案并阐述理由;③绘制作品流程图和结构图;④详细描述所需器材和加工方法。
4 测量工具
本研究以动态分组策略为自变量,以学习态度、合作倾向、群体凝聚力、合作融洽度、工程设计和编程能力作为因变量,采用经过专家论证、修改而形成的问卷或测试进行数据收集。
①学习态度问卷(总Cronbach’s α值=0.912):参考相关研究成果[48][49][50],设有自信心、享受度和价值观三个子维度。
②合作倾向问卷(总Cronbach’s α值=0.81):参考相关研究成果[51],设有包容性、互惠性、合群意愿三个子维度。
③群体凝聚力问卷(总Cronbach’s α值=0.88):参考相关研究成果[52][53],设有群体互动对个人的吸引力、群体任务对个人的吸引力、群体统合—互动、群体统合—任务四个子维度。群体互动对个人的吸引力指的是群体成员对群体互动和群体关系的感受;群体任务对个人的吸引力指的是群体成员对于群体集体目标实现的个人参与感;群体统合—互动指的是群体成员对群体亲密度、相似性和作为一个社会单位的联结感;群体统合—任务指的是群体成员对群体亲密度、相似性和围绕群体任务的凝聚力的信念。
④合作融洽度问卷(总Cronbach’s α值=0.76),参考相关研究成果[54][55][56],共设有三道主观题:第一题请学生评价小组搭档在合作学习中的贡献程度如何?第二题是请学生评价自己在合作学习中的贡献程度如何?在此基础上,本研究增加了第三题:“请输入你希望下次合作的组员姓名______(最多两个)”。
⑤工程设计和编程能力测试:学生的工程设计和编程能力主要通过填写学习任务单和编程测试题两种方式来考查。其中,学习任务单的总分为40分,其评分标准由本研究团队自行编制;编程测试总分为100分,由教师、助教依据作品评分表共同评分,评分表参考康斯雅等[57]提出的机器人作品评分表绘制而成。
除了上述工具,本研究还通过课堂观察和访谈获得相关信息,以作为后续研究结论的佐证。
5 动态分组流程
现有动态分组的研究以奥苏贝尔的有意义学习理论为依据,认为学习者的知识水平在一周的时间发生了变化,故学习小组需要每周动态调整[58]。此外,班杜拉的社会学习理论、皮亚杰的认知发展理论、西蒙斯的联通主义,乃至脑科学与学习科学的最新进展,均与动态分组有一定的联系,但尚缺少具体而充分的研究[59]。结合机器人教育的特点,整合Chuang等[60]的配对策略和Chen等[61]的多维动态分组策略,本研究将动态分组的操作流程分为五步(如图1所示):
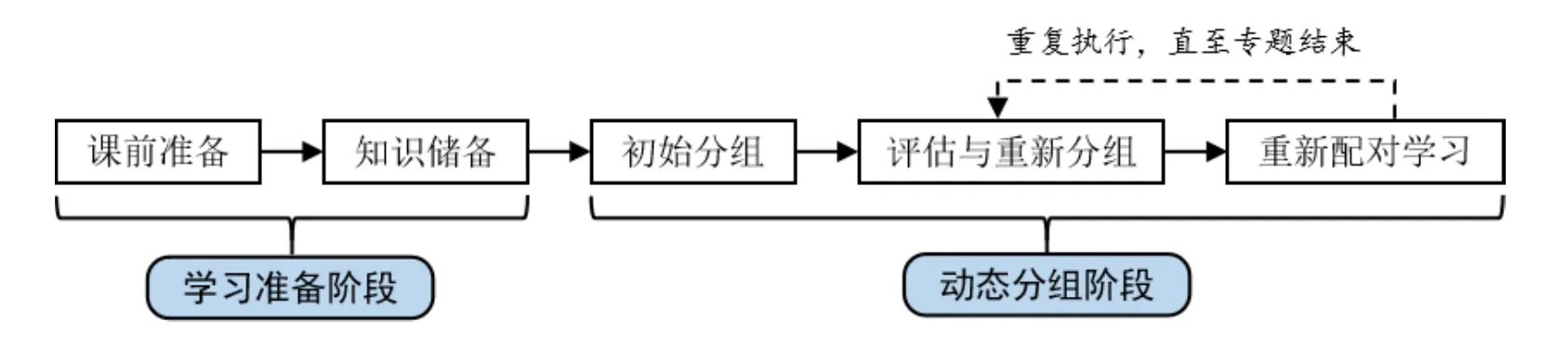
图1 动态分组的五步操作流程图
①课前准备:教师根据教学内容划分专题,并设计配套的学习任务单。
②知识储备:机器人基础知识的讲解与学习。
③初始分组:教师要求学生随机配对,并合作完成专题学习。
④评估与重新分组:经过一段时间的专题学习后,教师采用问卷和测试的方式来评估学生的学习状态。首先,教师根据合作倾向、群体凝聚力、合作融洽度(前两题)、工程设计和编程能力测试的分数加权计算出排名,再按照排名进行初步异质分组(即第一名和最后一名为一组),依此类推;然后,参考合作融洽度问卷的第三道题调整分组情况,得到最新的分组结果。
⑤重新配对学习:按照最新的分组结果,学生以小组形式合作完成新专题的学习。
之后,重复执行第④、第⑤步,直到最后一个专题结束动态分组。值得注意的是,循环的次数由具体的专题数量来决定。参考Wu[62]的两阶段合作学习策略,本研究将第①、②步归为学习准备阶段,后面的步骤归为动态分组阶段。
6 实验周期
本研究于2020年9月15日至2021年1月5日开展教学实验,共持续17周,每周3节课,共51个课时。本研究分阶段进行教学实验,具体教学安排如表1所示,包括:①在学习准备阶段,主要完成五个专题的学习。其中,前四个专题为理论讲授部分;而专题五为教师带领学生使用开源硬件,设计与开发多个创客项目,以熟悉Arduino软硬件的基本操作;②在动态分组阶段,主要完成专题六和专题七的学习并进行学期任务考核。
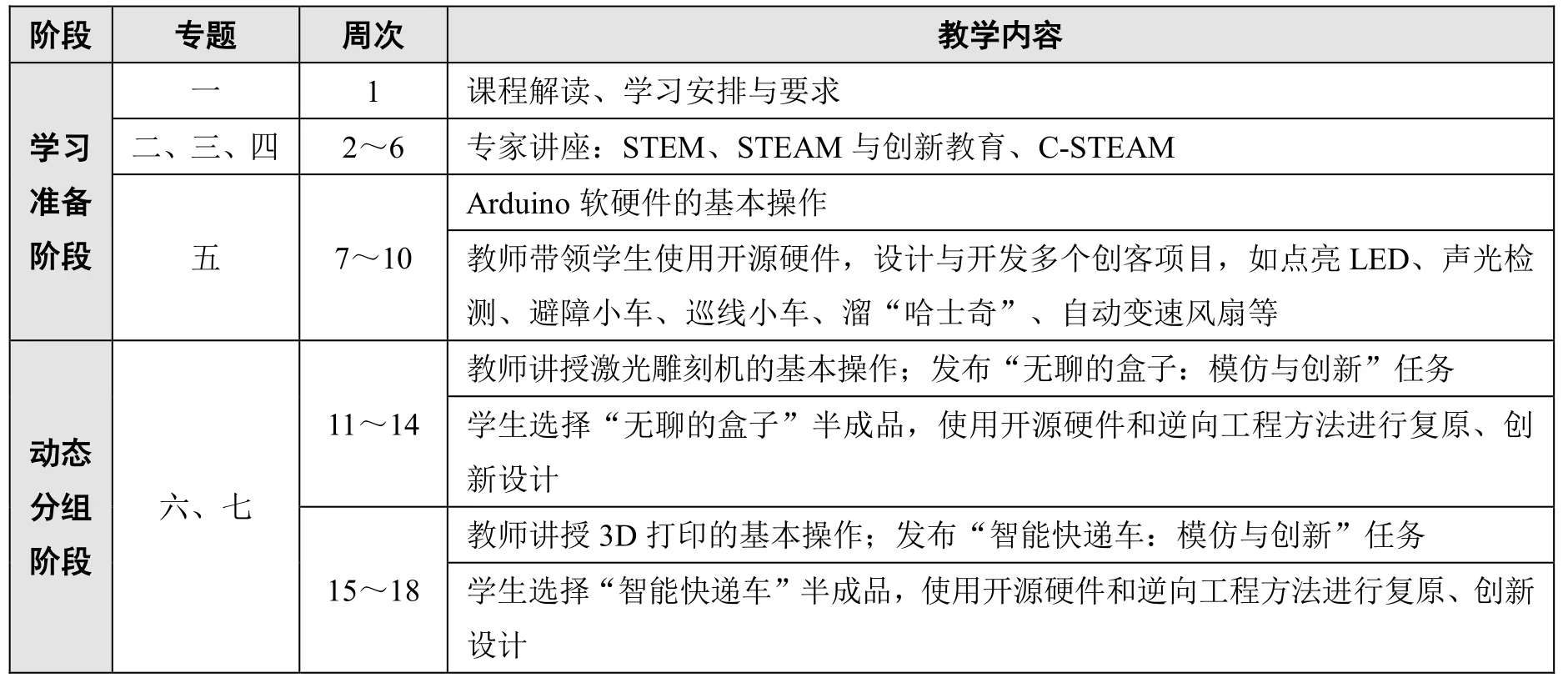
表1 教学安排
7 实验流程
在本实验中,专题一至专题五为学习准备阶段,不作实验干预;专题六和专题七为实验阶段。整个实验分为前测、专题六学习、第1次后测、专题七学习、第2次后测等五个环节(如图2所示):①使用先前知识测试进行前测;②学生随机配对,完成专题六相关内容的学习;③进行第1次后测,要求学生完成合作倾向问卷、群体凝聚力问卷、合作融洽度问卷的填写,并参加工程设计和编程能力测试;④学生根据分组结果,合作完成专题七相关内容的学习;⑤进行第2次后测,要求学生完成学习态度问卷、合作倾向问卷、群体凝聚力问卷、合作融洽度问卷,并参加工程设计和编程能力测试。因受实验时间限制,本研究只在专题六后进行了一次动态分组;专题七虽做了动态分组需求的测试,但因课时关系没有开展新专题的合作学习。

图2 实验流程
三 研究结果
为检验动态分组前后因变量是否存在差异,本研究采用非参数检验中两个相关样本的威尔科克森符号秩检验分析相关数据,数据统计结果如表2所示。
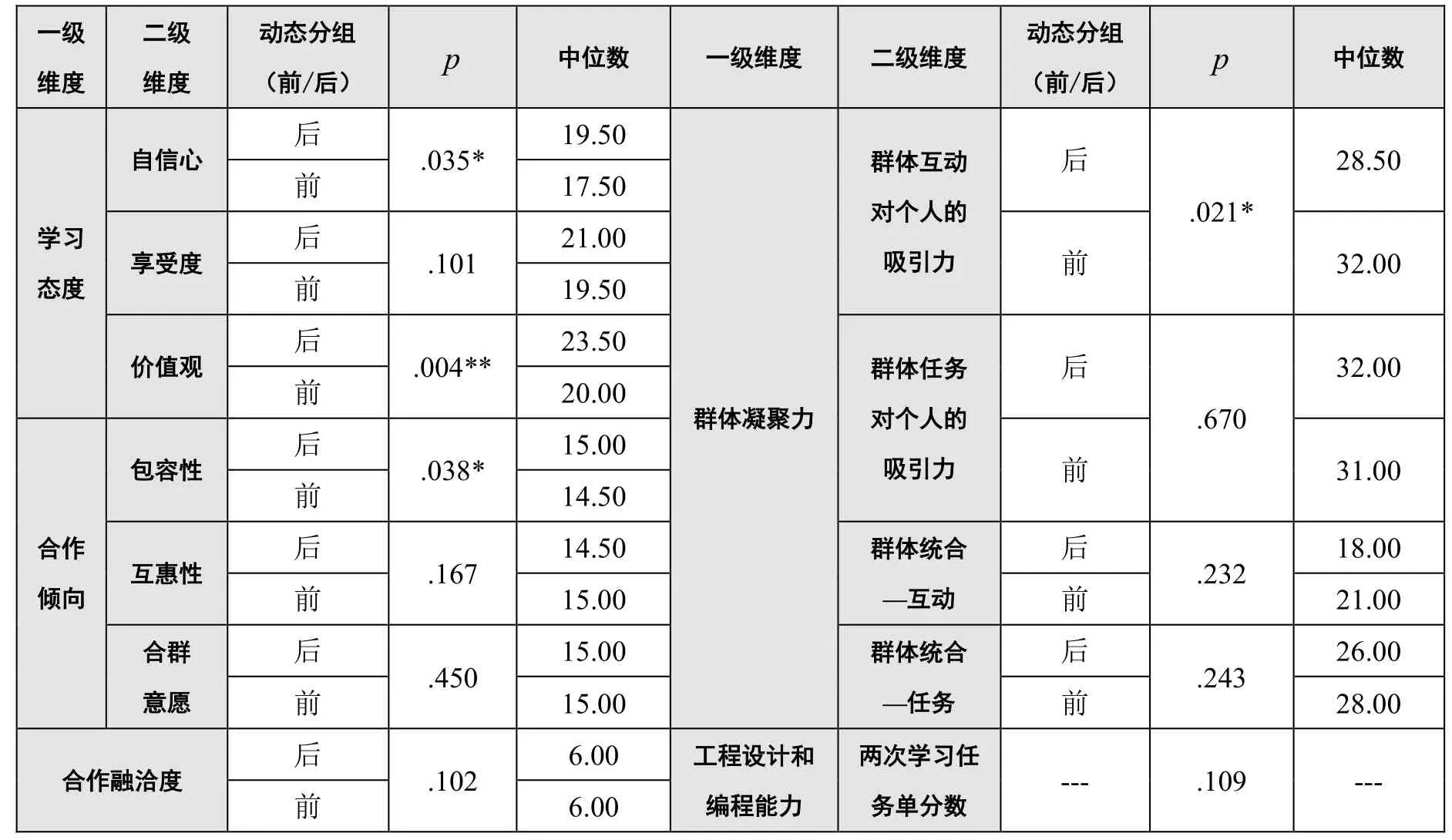
表2 数据统计结果
1 学习态度差异
动态分组前后,学生的自信心(p=0.035<0.05)和价值观(p=0.004<0.01)存在显著差异,而享受度不存在显著差异。进一步分析中位数,可以看出动态分组后学生的自信心和价值观明显高于动态分组前。
2 合作能力差异
①合作倾向方面,动态分组前后学生的包容性存在显著差异(p=0.038<0.05),而互惠性和合群意愿不存在显著差异。进一步分析中位数,可以发现动态分组后学生的包容性高于动态分组前。②群体凝聚力方面,动态分组前后群体互动对个人的吸引力存在显著差异(p=0.021<0.05),而其它三个子维度均不存在显著差异。进一步分析中位数,可以发现动态分组后学生的群体互动对个人的吸引力小于动态分组前,说明动态分组可能降低群体互动对个人的吸引力。③合作融洽度方面,动态分组前后学生的合作融洽度不存在显著差异(p=0.102>0.05),而中位数分析也进一步验证了动态分组前后学生的合作融洽度等同。
3 工程设计和编程能力差异
动态分组过程中涉及无聊的盒子和智能快递车两个学习项目,学习难度层层递进,因此学生在编程测试中的得分不具有可比性,故此不赘述。考虑到学习任务单的填写能体现学生工程设计和编程能力的实质性变化,故本研究聚焦于学习任务单的分数分析,来呈现动态分组前后学生工程设计和编程能力的变化:①本研究使用Kendall和谐系数,测量三名评分者对学习任务单评分的一致性。数据统计结果显示,p=0.021<0.05,Kendall’s W值>0.6,说明三名评委的打分具有一致性。②两次学习任务单分数的非参数检验结果显示,动态分组前后学生的工程设计和编程能力不存在显著差异(p=0.109>0.05)。
四 结果讨论
1 动态分组能提高学生的自信心和价值观
在机器人教育中,学生会遇到各种各样的问题,如硬件连接、程序错误等[63]。这些问题容易降低学生对学好机器人课程的自信心,并对机器人教育能提高自己的能力这一说法表示怀疑。结合课堂观察,本研究发现:进行初始分组时,合作学习只停留在组内合作,遇到问题时容易产生焦虑情绪,而且不认同机器人课程的教育意义,即产生较低的价值观;在第一次动态分组后,学生与学生之间越来越熟悉,学生会尝试和之前的小组成员交流沟通、共享经验和资源,以完成特定的任务。此时,小组之间的互动不仅促进小组内部的知识发展,而且有助于传播知识和增长集体知识[64],这也在一定程度上有利于提高学生的自信心和价值观。
上述观点在本实验中得到了印证——实验结果表明,动态分组后学生的自信心和价值观明显高于动态分组前。而在访谈中,也有学生表示:“更换小组成员后,她比我懂的更多,她产生了一些自己完全没思考过的想法,她还坚信该想法并做出来了。”可以看出,经历过一次项目合作后,小组成员都会积累一定的经验,其中高成就者更会运用自己成功的经验且会带领低成就者共同完成项目。此外,合作融洽度问卷的统计结果显示,第二次评估自己团队中表现一般的学生数比第一次有明显减少,这也印证了动态分组后学生的自信心和价值观提高了。
2 动态分组有助于培养学生的包容性
有研究者发现,在学习竞争激烈的环境下,部分学生为了保持自身竞争力而不愿共享知识和资源,以抗拒抵触的心理面对合作学习模式[65]。然而,本实验所得结果与上述观点相反:动态分组后学生合作倾向中的包容性明显高于动态分组前,且合作融洽度也不存在显著差异,说明学生对动态分组没有产生抗拒心理,对合作伙伴也表现出了较大的包容性——此结果与Siqin[66]提出的“动态分组有助于促进更高水平的集体认知责任”观点一致。
结合课堂观察,本研究发现学生B起初拒与新的伙伴合作,但经过教师的开导和两周的磨合后,学生B接受了新伙伴并尝试与其一起完成任务。项目结束后,学生B在访谈中表示:“不仅是为了达到课程的学习要求,还希望能考验一下自己,看看比较内向的自己在一个陌生的环境与同学合作会有怎样的突破;我也意识到,因个人原因抵触合作伙伴,会让她觉得不自在,所以我就主动接触她,和她一起想办法完成任务。”由此可见,初始分组的确会让部分学生产生抗拒心理,但经过一段时间的磨合后,小组成员为了共同完成任务,他们会接纳新伙伴,关系也会更加和谐融洽。此外,合作融洽度问卷中最后一题(即请输入你希望下次合作的组员姓名______(最多两个))的数据统计结果显示,经历动态分组后,学生更愿意尝试与陌生的同学合作,打破了只与朋友搭档的僵局,这也印证了动态分组有助于培养学生的包容性。
3 动态分组降低了群体互动对个人的吸引力
从合作学习的角度来看,一个良性的合作小组往往需要经历组建、形成、发展和成熟四个发展阶段。根据课堂观察发现,大部分合作小组都还停留在形成阶段,尚未形成良好的群体凝聚力,这和动态分组前后群体凝聚力无显著差异是一致的。然而,进一步分析子维度发现,群体互动对个人的吸引力维度在实验后反而降低了。过往研究发现,群体间互动主要受任务不确定性、时间与目标取向、相互依赖性等因素的影响[67]。动态分组减少了小组成员的相互依赖性和归属感,又因任务难度增加,导致群体互动对个人吸引力降低。从这个角度上说,单纯依赖合作学习和动态分组并非十全十美,还可以增加竞争、社会比较等方法调动学生的积极性[68]。
五 结语
为弥补静态分组中合作倦怠和角色固化等不足,本研究采集多模态数据分析了学生的学习态度、合作能力和学业成就。研究表明,动态分组在提升学生的学习态度和合作能力的同时并没有因为组员的变动而降低学业成就,这挑战了教师认为组员的变动容易涣散团队精神、拉低团队战斗力从而影响合作学习成效的惯性思维。从这个意义上说,动态分组在机器人教育中展现出了较大的应用潜力。后续研究可开展等组实验,深入挖掘影响分组效果的因素和改进办法,以进一步优化动态分组的效果。
此外,本研究存在样本量少、性别比例失衡的问题,故研究结果的推广性和普适性还有待进一步验证;而前期理论讲授部分占用的时间较长,实际开展动态分组实验的时间仅为8周,导致动态分组次数较少,未能跟踪研究大学生在机器人课程中开展动态分组的情况。因此,后续研究还需扩大样本量且尽可能实现性别均衡,并扩充项目学习的数量以增加动态分组的次数。同时,还可延长每次项目学习的合作时间,给予学生充足的时间使其经历“抗拒—磨合—合作”的过程,以充分考察学生合作能力的变化。
