基于无人车竞赛的车辆工程专业课程实践教学方案设计
2022-03-23俞小莉杨爱喜陈俊玄盛军辉陈沛禹
黄 瑞, 俞小莉, 杨爱喜, 陈俊玄, 盛军辉, 陈沛禹
(浙江大学a.能源工程学院;b.工程师学院,杭州 310027)
0 引 言
近年来,随着经济与科技的发展,高校车辆专业传统的培养方式所输出的人才已很难满足当今高度集成化的汽车行业所青睐的复合型、应用型人才需求[1-3]。为了突破传统工科壁垒、促进多学科交叉融合、培养跨学科复合型人才,新工科建设计划应运而生[4-7]。“项目制”是我校工程师学院积极响应新工科建设计划而创新设立的一种新型学生培养模式,“汽车工程及其智能化”即为首个全日制专业学位研究生项目制研究方向。进入该项目制研究方向的研究生为来自光学、动力、电子与信息和电气工程4个不同学科大类的本科生,研究生专业课程安排也具有跨学科性,充分体现了多学科领域交叉的特点。
基于学生本科专业背景差异大、新开专业课程学科知识跨度大的教学背景,为了实现研究生协同创新能力和实践能力培养的教学目标[8-10],汽车工程及其智能化研究方向特别开设了车辆工程专业课程设计与实践教学课程,根据车辆自动驾驶技术发展对教学的需求,以无人驾驶小车为教学载体,开展从无到有的无人驾驶车平台搭建、功能设计与课程竞赛等多项实验实践教学活动,是一套针对性较强的实验实践教学方案。
1 教学目标与思路
车辆工程专业课程设计与实践课程的教学目标是:通过教师的指导,学生能够结合专业课程知识与产业实际技术需求进行专题设计研究,促进对前置专业课程的理解,培养理论联系实际、学以致用的能力,更重要的是培养学生在具有多学科交叉背景的团队中充分发挥各自优势完成设计任务的能力。总的来说,本实践教学环节着力培养学生在多学科交叉背景的团队中相互学习、合作的团队能力;应用所学理论知识分析问题、发现问题的能力以及自主拓展学习、独立解决问题的能力。基于该目标,课程教学方案的设计思路为:
(1)学生依托无人驾驶小车硬件平台,以团队的形式开展实践,每个团队须包含来自4个不同专业的学生。
(2)学生通过开展文献查阅与市场调研,结合团队成员的交叉学科背景提出多项能够体现跨界思想的车辆自动驾驶技术进行开发,在规定的时间内完成开题、解题、结题的闭环流程。
(3)各团队以竞赛的方式开展车辆自动驾驶技术的结题报告和成果展示。
2 无人驾驶小车实践教学开发与设计
2.1 硬件平台的选择与搭建
轮式移动机器人平台是高校开展无人驾驶实验教学的一种常用工具[11-13]。目前市面上有很多完全封装的移动小车平台,如直接利用此类平台进行软件开发,则无法训练学生的系统性思维能力,也难以补足学生的车辆相关专业知识。因此,本课程只提供无人驾驶小车平台必要的零部件和传感器,由学生自主完成搭建和调试工作。
课程所提供的主要零部件有模型车底盘、有刷电动机、电调、锂电池包、转向舵机;控制系统方面,选择树莓派3B+作为上位机、STM32单片机作为下位机用于接收简单的传感信号和发送PWM信号;传感器方面,包括2D激光雷达、CSI接口5×106像素摄像头、IMU惯性导航元件和超声波传感器。学生需要对小车进行组装,并通过编程使小车能够准确执行下发的控制指令,在整个过程中对汽车构造、汽车理论和控制理论等多门学科的知识进行实践。无人驾驶小车平台的整体框架如图1所示,实物如图2所示。

图1 无人驾驶小车平台整体框架图

图2 无人驾驶小车平台实物图
2.2 平台功能设计与实践
2.2.1 功能设计及能力培养
为充分锻炼不同专业背景学生合作解决工程实际问题的能力,要求学生依托无人驾驶小车平台,必须完成以下三大功能设计:循迹功能、自适应巡航控制(Adaptive Cruise Control,ACC)功能、即时定位与地图构建(Simultaneous Localization and Mapping,SLAM)与自主导航功能。此外,也可创新开发其他附加功能。
(1)循迹功能。循迹功能场地布置如图3所示。场地道路轨迹主要包含直道、不同曲率弯道和十字交叉道路,同时在轨迹旁布置有红绿灯、STOP交通标志,在轨迹上布置有行人、车辆和普通障碍物模型。

图3 循迹功能场地示意图
需要学生完成的开发工作包括:①实现基础循迹。小车需完成对黑线道路轨迹的识别并实现在整个路况下的行驶。②识别行人、车辆实现避障。小车在逐渐靠近行人和车辆的行驶过程中,通过视觉传感器识别目标物体进行避障动作,并在避障动作结束后重新循迹回到轨迹线上。③针对普通障碍物实现避障。④识别红绿灯状态实现“红灯停绿灯行”。通过视觉传感器识别红绿灯当前状态,并实现红灯亮起过程中小车停在原地等待,绿灯亮起后小车继续循迹行驶。⑤识别STOP标志实现停车。
培养学生掌握单片机原理、图像处理、车辆运动学模型、信号传输通信、深度学习算法、运动控制算法等基础知识,使学生具有系统架构观念,能够协调整合各个子任务要求,其不仅体现在硬件层面如传感器的选择上,同时在软件层面上也要求学生认真思考各模块代码的调用与优先级设置。
(2)ACC功能。ACC功能场地布置如图4所示。在空旷场地上布置直道黑色轨迹路径,两辆小车配合完成ACC功能。前车在图中用A进行表示,通过循迹功能保持稳定向前加减速行驶,后车在图中用B进行表示,为各团队所设计制作的小车,通过使用相机、雷达传感器或车间通信方式(V2V,Vehicle to Vehicle)测量与前车间隔的距离,时刻调整自车速度从而保持规定的安全距离。
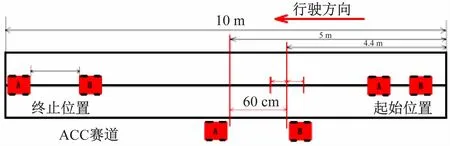
图4 ACC功能场地示意图
需要学生完成的开发工作包括:①前车缓慢加速启动与缓慢减速停车状态下保持跟车。②前车急加速启动与急减速停车状态下保持跟车。
培养学生掌握超声波雷达传感器原理、数据滤波处理、经典控制算法等基础知识,需要学生通过自主查阅资料研究当前整车应用ACC系统现状以及相关技术原理,并以此为基础完成小车平台相关功能开发。
(3)SLAM与自主导航功能。SLAM与自主导航功能场地布置如图5所示。最外围的黑色框代表所设置的封闭场地,场地内布置固定障碍物,各团队的小车在已建地图的基础上完成从发车点行驶到停车点的自主导航任务。
需要学生完成的开发工作包括:①遍历行驶场地进行建图。控制小车遍历测试场地,建立完整的测试场地地图。②无障碍导航。如图5(a)所示,以停车标志物为导航目标,小车从固定发车点自主导航行至场地目标停车圆内。③固定障碍导航。如图5(b)所示。④实时避障导航。导航期间当小车运动到A点时,迅速加入障碍物,测试小车能否及时重新规划路线,绕开障碍物前往目标点。

图5 SLAM与自主导航功能场地示意图
培养学生掌握激光雷达点云数据处理、ROS(Robot Operating System)操作、路径规划算法、SLAM算法等基础知识,实现自动驾驶车辆在无GPS定位情况下地图构建及自身位置确定的功能,以及完成抵达预设目标点的自主导航。
(4)其他附加功能。鼓励学生在完成规定功能设计开发之余进行自主创新,如自动泊车、无线充电和APP远程控制等相关技术功能。
培养学生独立发现问题、解决问题的能力以及通过文献阅读、企业走访、市场调研等手段探究设计课题任务,自主研究技术路线、设计解决方案的工程协同创新能力。
2.2.2 竞赛考核及评分规则
汽车工程及其智能化项目制课程的考核内容包括开题报告、中期汇报和成果展示,其中成果展示占有重要比例。为了激发学生积极主动的学习动机、培养严肃认真的学习态度、营造比学赶超的学习氛围,成果展示的形式为自动驾驶竞赛(见图6)。竞赛结果直观有效,对参赛团队而言,既是完成考核任务,也是研究成果展示,更是实现自我挑战与超越[14-16]。评分规则设置如表1所示。

表1 无人驾驶竞赛评分表

图6 智能车竞赛现场图
3 学生设计成果
基于“循迹功能”设计开发,学生掌握轨迹图像处理算法和基于YOLOv3的目标识别算法,效果图如图7、8所示。

图7 轨迹图像处理过程效果图

图8 基于YOLOv3设计的目标识别算法效果图
以基础循迹子任务为例,摄像头获取轨迹原始彩色图像,经过灰度化、图像分割、图像去噪、边缘检测后达到如图7(c)所示效果,通过相机标定计算出预瞄位置与当前车身方向的横向偏差距离值,根据基于最小误差的单点预瞄驾驶员模型计算出前轮转角用以控制小车未来时刻的行驶轨迹方向以实现对轨迹的跟踪。目标识别子任务中,学生充分考虑识别目标种类的多样化和复杂性,采用深度学习方法,基于YOLOv3算法采集制作目标物体数据集,对YOLOv3-tiny模型进行微调训练,进而实现对行人、车辆、红绿灯、STOP标志的有效识别。
SLAM与自主导航功能建图效果与路径规划效果如图9所示。基于ROS采用Gmapping算法实现建图子任务,基于车辆阿克曼转向模型编写导航程序,在可视化界面输入目标导航点,程序输出一条合理的规划轨迹并发布运动控制指令,小车即可实现自主导航功能。

图9 SLAM与自主导航功能效果图
4 结 语
本文以汽车工程及其智能化项目制培养模式为依托,结合学生本科专业背景差异大、新开专业课程学科知识跨度大的教学背景,设计新型实验实践教学方案。结合车辆无人驾驶技术,以无人驾驶小车为教学载体,由学生自主搭建调试小车平台,完成课程规定功能设计和自主创新附加功能。通过无人驾驶竞赛对教学成果进行评估,有效激发学生深层次学习动机。根据教学过程实际和反馈情况,本实践课程加深了学生对前置专业课理论知识的理解,发现问题、解决问题的能力得到锻炼,不同专业背景的学生在团队中互相学习渗透,提升跨学科学习能力,是面向汽车行业智能化培养复合型、创新型和应用型专业人才的一次有益探索。