S波段双偏振雷达和X波段相控阵天气雷达中气旋识别结果对比*
2022-03-23苏永彦刘黎平
苏永彦 刘黎平
1 中国气象科学研究院灾害天气国家重点实验室,北京 100081
2 中国气象局公共气象服务中心,北京 100081
提 要: 为了比较S波段双偏振雷达资料和X波段相控阵天气雷达资料识别中气旋的差异,结合X波段相控阵天气雷达(XPAR)和S波段双偏振天气雷达(SPOL)及地面观测资料,对比分析了2019年4月19日发生在广州的一次中小尺度天气过程,结果显示:使用的识别算法可以正确识别出中气旋;XPAR的高时空分辨率数据可以弥补SPOL仰角层不足的缺陷,观测到更加完整的中气旋垂直结构,识别结果中的参数也比SPOL更加细致,更精准地揭示了中气旋的短时演变。研究结果表明XPAR对于强天气回波的观测识别性能相比SPOL具有持续时间更长、垂直结构更加精细、正负速度对差值更大、随整个天气过程演变更加细致等优势,有利于对中小尺度天气系统的快速发展、演变开展细致深入的研究。
引 言
强对流天气中的暴雨、冰雹、强风、龙卷等中小尺度天气系统是产生局地气象灾害的主要原因。中尺度气旋是中小尺度强对流系统的重要组成部分,是雷暴尺度的涡旋,带有中气旋的对流风暴具有很高概率产生龙卷、冰雹、雷暴大风和短时强降水等强对流天气,因此中气旋的出现是强对流天气即将发生的明显信号和主要预警指标。如果能提前精准识别中气旋,便能在很大程度上减少人民生命财产的损失。
我国新一代天气雷达(CINRAD)采用的业务观测模式一般为VCP21模式,扫描周期较长(6 min),仰角层较为不足(9层仰角且分布不均),导致其垂直分辨率不足,对中气旋识别、参数定量估计和快速演变探测能力有待进一步提高。双偏振天气雷达采用发射水平和垂直偏振的电磁波来对粒子相态进行识别及对降水率进行准确的定量估测。相控阵天气雷达则通过提高雷达观测数据的时空分辨率来提高观测性能,目前已经被逐步运用到实际业务之中,是可能广泛应用的下一代天气雷达技术。
早在2002年,相控阵雷达技术就被美国国家雷达技术委员会推荐为未来取代美国WSR-88D系统的技术,2006年美国联邦气象工作办公室的工作报告也推荐可同时服务于天气过程监测、空管和飞机跟踪的相控阵天气雷达技术(Weber et al,2007)。为了分析相控阵天气雷达的这些优势,评估其应用价值,同时,为进一步发展替代WSR-88D的技术,美国建立了国家气象雷达试验平台,将退役的宙斯盾(SPY-1)相控阵雷达进行改造,建立了两维相扫体制的相控阵天气雷达系统,安装在俄克拉何马州的诺曼市,并进行了观测试验(Weadon et al, 2009)。2016年美国国家强风暴实验室(NSSL)工作人员对一次使用WSR-88D雷达探测龙卷风的数据进行处理分析,发现该雷达能够正确识别出龙卷风中的涡旋特征,但当中气旋距离雷达较远时,WSR-88D识别结果误差较大,甚至识别不出涡旋特征(Steve, 2016),垂直结构特征也不明显。同年日本研究人员使用单极化相控阵雷达对千叶市一次降水过程进行探测,观测到了明显的垂直风切变并且含有明显的垂直发展回波(Kashiwayanagi et al,2016)。日本研究人员在2018年还利用X波段相控阵天气雷达对东京市一次强对流天气中含有的中气旋进行了三维分析,通过三维快速扫描揭示了中气旋的空间结构及快速发展过程(Shimamura et al,2019)。通过与WSR-88D雷达探测结果进行对比,相控阵天气雷达能够更好和更准确地探测快速变化的天气系统,对于强对流过程的分析和预警非常有用。除此之外,美国还讨论了在相控阵天线上实现双偏振技术,制定了实现气象和导航等多任务功能(MPAR)的相控阵雷达可行性方案及性能指标。同时,美国的协同适应性大气遥感观测计划(collaborative adaptive sensing of the atmosphere,CASA)也采用了“相控阵小雷达”,以提高低空探测能力。美国计划在2025年完成对目前机械扫描多普勒天气雷达的替换。
中国也开展了对于相控阵和双偏振雷达技术的研究。2007年,中国气象科学研究院与中国电子科技集团公司第十四研究所等单位合作,攻克了军用相控阵雷达向相控阵天气雷达转化的关键技术,成功研制了一部S波段相控阵天气雷达原理样机(张志强和刘黎平,2011),获得了部分资料,并开展了相控阵天气雷达方面的研究,证明了相控阵天气雷达技术的可行性。2009年,中国气象科学研究院灾害天气国家重点实验室与安徽四创电子股份有限公司合作,研发专门应用于快速变化的中尺度对流系统的车载X波段相控阵天气雷达系统。2014年,中国气象科学研究院的研究人员研究了相控阵天气雷达的测试和定标方法,并利用该雷达与C波段双线偏振雷达于2013年4—6月在广东省江门市鹤山站进行了对比观测试验,以检验该雷达观测模式及其对快速变化的对流云演变过程的观测能力。广州、佛山、珠海等地也布设了X波段相控阵天气雷达网,进行强对流的观测。2016年中国气象科学研究院的研究人员利用X波段相控阵天气雷达(XPAR)和S波段双偏振天气雷达(SPOL)对华南一次强对流过程进行了分析,XPAR获取了时空分辨率远高于SPOL的观测资料,可以弥补SPOL仰角层不足的缺陷,观测到了超级单体完整的垂直结构,可更精确地描述超级单体的短时演变,但衰减较为严重,难以观测到10 dBz以下的回波(于明慧等,2019)。2019年9月在江苏高邮安装了国内第一部C波段相控阵天气雷达。
在中气旋识别方面的进展,大致分为三个阶段:第一阶段,即Donaldson(1970)提出的使用径向速度的方位切变值和垂直伸展厚度值作为中气旋识别判据,阈值为径向速度方位切变值≥5×10-3s-1,其伸展厚度大于3 km;第二阶段,即1977年NSSL研究人员提出的使用与距雷达距离有关的径向速度方位切变阈值和厚度阈值识别中气旋,数值为在距雷达230 km;以内方位切变值≥5×10-3s-1,其伸展厚度大于3 km;在230 km以外切变值≥1×10-3s-1,无厚度要求(JDOP, 1979),此后,针对中气旋的研究一直使用该识别判据;第三阶段,即1987年NSSL研究人员在多普勒/闪电试验中首次提出的,其使用旋转速度代替方位切变值作为判据(Forsyth et al, 1989)。Andra(1997)根据美国俄克拉何马中部伴有强雹和龙卷的中气旋进行统计给出了距雷达不同距离圈上观测到的旋转速度和中气旋强度的关系,将中气旋判据进行了细化,其分成了弱切变、弱中气旋、中等强度中气旋、强中气旋四个区域,并沿用至今。
近年来国内也提出了许多中气旋识别方法。2001年,胡明宝等(2003)利用多普勒天气雷达径向速度图识别中气旋的方法设计了自动识别软件,个例测试表明:该方法识别出的中尺度气旋与反射率因子图上出现的钩状回波相对应,用径向速度图进行不同高度之间的验证性识别可降低报错率。陶岚(2006)研究了以兰金模式(Rankin)为基础的中气旋三维识别技术,即通过在不同仰角的径向速度图上寻找、提取三维特征信息,进而与中气旋的切变和时空连续性三条判据进行比对,去掉不符合条件的伪中气旋,最后再使用NSSL的算法进行后期的验证。2010年,广东工业大学和广州中心气象台提出了一种基于浸水模拟改进算法的中气旋自动识别方法。该方法利用应用数学形态学和标记来实现图像分割,得到符合特征要求的广义极值区域,进而在径向速度灰度图中得到符合基本属性特征的凸峰和凹谷区,并利用两者关系检测中气旋(潘运红等,2010)。2017年,天津大学提出了一种基于速度对结构检测的中气旋识别方法,该方法利用图像树形结构分析方法,用树的节点对应一片同强度区域,用边代表不同强度区域间的重叠关系,先在雷达的径向速度场中寻找速度极值区域,包括速度极大值区域和速度极小值区域,然后通过匹配的方式获取涡旋的速度对结构。该方法直接从检测单仰角径向速度图中的二维正负速度对结构入手,避免了因一维切变段检测造成的误报问题,为速度对结构中的两个极值区域设计树形数据结构,既可将中气旋的兰金条件隐含于其中,又有效避免了环境风的影响(侯谨毅和王萍,2017)。
为了进一步分析SPOL和XPAR探测强对流的能力,本文以两种雷达观测数据对中气旋识别结果进行定量对比,以进一步提高对中小尺度气旋系统的监测预警能力。
1 资料来源和方法
本文使用的观测设备如下:(1)架设在广州白云区帽峰山森林公园的XPAR,可获取最大扫描范围42 km的径向速度数据及12层仰角的垂直结构。(2)位于广州番禺区的SPOL,可扫描230 km半径的回波强度以及偏振数据,且衰减极低。其中SPOL为广东省气象局业务雷达,按业务规定需定期进行周维护和月维护,且S波段雷达几乎无衰减,因此数据较为可靠;XPAR为广州4部组网相控阵天气雷达中的一部,已完成定标并投入使用,且雷达本身使用了自适应约束的衰减订正方法,因此无需进行重复的衰减订正,数据也相对可靠(程元慧等,2020)。识别中气旋最主要是运用径向速度,雷达探测径向速度主要依据多普勒频移原理,在雷达得到较好标定,雷达频率稳定性得到保障的前提下,一般可以达到较好的探测精度。图1给出了两部雷达的相对位置。

图1 SPOL和XPAR的相对位置Fig.1 Relative position of SPOL and XPAR
XPAR性能主要指标见表1,本次外场试验期间,XPAR获取一个样本(即雷达对所有仰角扫描完毕,获得该时刻所有仰角层的径向数据,以下统称一次体扫)所需时间为1.5 min,扫描后可得到均匀分布的12层仰角扫描资料,能够获得最均衡的时空分辨率。表1还同时列出了SPOL的相关参数,其中SPOL采用常规抛物面天线,以VCP21的观测模式进行观测。
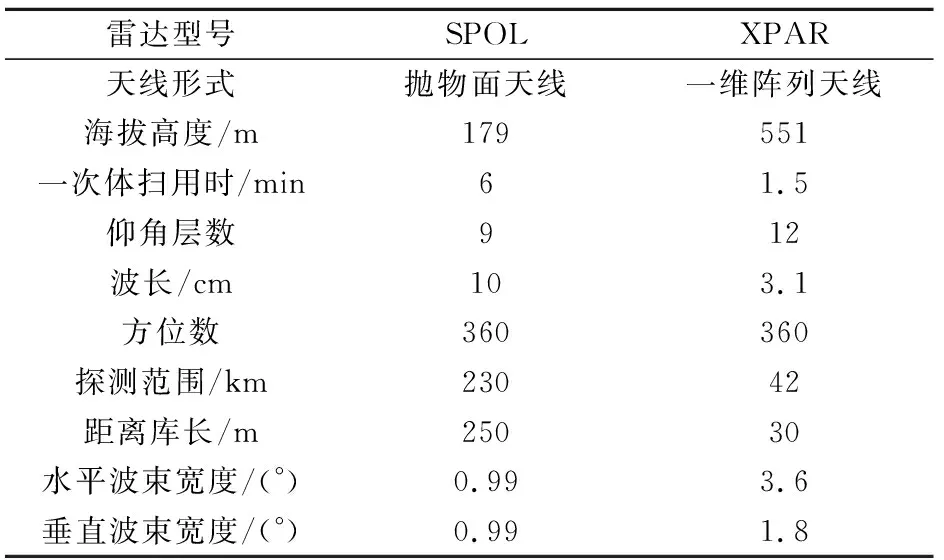
表1 XPAR和SPOL的主要技术参数Table 1 Main technical parameters of XPAR and SPOL
理论上,XPAR时空分辨率越高,能观测到的中气旋内部结构应当更加精细,观测到的中气旋生命史时间应当更长,识别的中气旋正负速度对差值应当更大,但由于XPAR波长较短,因此与SPOL相比,XPAR衰减更严重且容易发生速度模糊。
表2给出了雨强对两个波段雷达的衰减情况,由表可知在反射率因子超过55 dBz时,X波段雷达衰减极为严重,而S波段雷达衰减很少。且由厂家提供的技术手册可知,距离雷达10 km处,最小可测回波强度是10 dBz,若可测信号低于该数值,雷达将无法探测到有用信号。因此虽然XPAR的数据已经经过衰减订正,但如果在回波距雷达过远,或回波强度很弱的情况下,回波本身已经衰减至观测不到,那么也就无法进行衰减订正了,这是不可避免的。

表2 不同雨强条件下X与S波段雷达的衰减Table 2 Attenuation of X-band and S-band radars under different rain intensities
在进行本文所做工作之前,使用该算法对广州市SPOL的2016年数据进行识别,并将识别结果与业务雷达中气旋识别算法识别结果进行对比,识别结果基本吻合,算法运行稳定,因此使用该算法进行本文所述工作。
2 识别结果对比
由于XPAR的时空分辨率要高于SPOL,理论上在相同时间、相同区域内XPAR对于中气旋的识别数量要多于SPOL,即大部分处于XPAR探测范围内的SPOL识别结果也同样能被XPAR识别出。因此本文的思路是先在SPOL雷达数据上寻找距离合适的中气旋识别结果,进行地理坐标换算后与相近时间的XPAR识别结果相比对,若处于换算后位置的比对结果符合中气旋标准(正负速度对差值大于20 m·s-1,垂直厚度大于3 km,持续时间大于等于2个体扫),则将两个结果判断为同一中气旋,再对两部雷达识别参数进行对比分析。
图2给出了SPOL 3.29°和XPAR 2.70°分别在2019年4月19日03:42:01—03:54:00和03:41:20 —03:53:38的共计6个时刻的径向速度PPI图。在色标选择上,XPAR探测最大不模糊径向速度为32 m·s-1,SPOL探测最大不模糊径向速度为30 m·s-1,但由于两部雷达的径向速度输出参数中最大速度大多处于20~26 m·s-1,因此为方便对比,本文XPAR和SPOL选用同一色标。
从图2可以看出,本次中小尺度天气过程自西向东发展,并且在该时间段内两部雷达识别出两个中气旋个例A和B。为了方便对比相近时间两部雷达的径向速度PPI图,图2并未给出识别出两个中气旋的所有时刻的速度图,文章后半部分将会展示所有时刻的中气旋对比图。 对于中气旋个例A来说,SPOL最初在03:42:01(图2a)识别出黑圈所标出的距雷达33 km的该中气旋个例,直到03:54:00(图2c)最后一次识别出距雷达40 km处的该中气旋个例;而XPAR在03:41:20(图2d)时刻第一次识别出该中气旋个例,距雷达36 km,03:55:10为最后一次识别出该中气旋的时刻,距雷达18 km。对于中气旋个例B来说,SPOL最初在03:54:00(图2c)识别出距雷达56 km的该中气旋个例,直到04:00:01时刻最后一次识别出距雷达54 km的该中气旋个例;XPAR雷达在03:53:38(图2f)时刻第一次识别出该中气旋个例,距雷达31 km,04:02:51为最后一次识别出该中气旋的时刻,距雷达25 km。
2.1 生命史差异
由图2及前文所述,SPOL识别中气旋A的时间段为03:42:01—03:54:00,历经11 min 59 s(即3个体扫);XPAR识别中气旋A的时间段为03:41:20—03:55:10,历经13 min 50 s(即9个体扫)。从起始时刻和结束时刻可以看出,XPAR识别的该中气旋个例的起始时刻比SPOL早41 s,在SPOL上一个体扫数据时刻后,结束时刻比SPOL晚1 min 10 s,在SPOL下一个体扫数据时刻前,而SPOL在03:36:00和04:00:00时刻均未识别出该位置存在中气旋。

图2 2019年4月19日SPOL 3.29°(a,b,c)和XPAR 2.70°(d,e,f)分别在时刻相近的两时间段内的中气旋识别结果径向速度PPI图(黑色圆圈内为该中气旋个例区域,下同)Fig.2 The radial velocity PPI of SPOL at 3.29° elevation angle (a, b, c) and XPAR at 2.70° elevation angle (d, e, f) in two similar time periods on 19 April 2019(The black circle is the mesocyclone area, the same below)
对于中气旋B,SPOL识别该中气旋时间段为03:54:00—04:00:01,历经6 min 1 s(即2个体扫);XPAR识别该中气旋时间段为03:53:38—04:02:51,历经9 min 13 s(即7个体扫)。从起始时刻和结束时刻可以看出,XPAR识别的该中气旋个例的起始时间比SPOL早22 s,也恰好在SPOL上一个体扫数据时刻后,结束时刻比SPOL晚2 min 50 s,在下一个体扫数据时刻前,而SPOL在03:48:00和04:06:01 时刻均未识别出该位置存在中气旋。
因此,XPAR由于具有较高的时间分辨率,其探测到的中气旋发展的生命史更为完整。
2.2 中气旋参数差异
2.2.1 径向速度特征
理论上来说,与背景风场相同的方向会存在速度模糊的情况,导致虚假的中气旋识别,但通过查看本文所述中气旋个例输出的径向速度值文本文件发现,径向速度最大值均小于雷达的最大不模糊速度,而从径向速度图中也未看出明显的速度模糊区域,因此未做退速度模糊处理。由于XPAR和SPOL数据时刻不重叠,因此本文选取了相对接近且三维涡旋内部的二维特征较多的时刻进行对比,即对于中气旋个例A,SPOL选取2019年4月19日的03:42:01—03:54:00,XPAR选取19日的03:41:20 —03:55:10,选取时间段两部雷达初始和结束时间相差1 min 10 s(XPAR延后一个体扫),其中SPOL经过3个体扫,XPAR经过10个体扫;对于中气旋个例B,SPOL选取2019年4月19日的03:54:00—04:00:01,XPAR选取19日的03:53:38—04:02:51,其中SPOL经过2个体扫,XPAR经过7个体扫; SPOL和XPAR在中气旋个例A和B分别对应时间段识别结果及主要参数对比如图3和图4所示。

图3 2019年4月19日03:42:01—03:54:00 SPOL和03:41:20—03:55:10 XPAR观测中气旋个例A的径向速度极值差和对应时刻的垂直厚度随时间的变化Fig.3 The difference between extreme values of radial velocity and vertical thickness at corresponding time of mesocyclone Case A by SPOL from 03:42:01 BT to 03:54:00 BT 19 April 2019, and by XPAR from 03:41:20 BT to 03:55:10 BT 19 April 2019
由于两部雷达所处海拔高度不同,而SPOL的3.29° 仰角识别出的中气旋所在位置经过坐标换算后并无XPAR仰角对应,因此选取相邻两个大仰角(2.70°,4.49°)数据进行对比分析,又由于在所选时间段内2.70°仰角的二维特征识别结果多于4.49°,为了更详细地分析两部雷达的差异,因而着重对比2.70°。
图3和图4给出了两部雷达分别在被选取的时间段内识别该中气旋的径向速度极值差和垂直厚度随时间变化情况,其中图3由于03:53:38时刻XPAR未在该层仰角识别出二维中气旋,因此图中未给出该时刻的径向速度极值差。由图3和图4可以看出,在绝大多数时刻,XPAR得益于更高的时空分辨率,识别的中气旋最大最小径向速度差值和垂直厚度数值均比SPOL大,并且从径向速度差值变化可以看出,XPAR可以更清晰地显示正负速度对差值和中气旋垂直延展厚度随时间细微的变化情况,例如图3所示中气旋个例A的03:41:20—03:47:29 期间XPAR识别中气旋个例A识别正负速度对差值从52.6 m·s-1变为52.2 m·s-1,而SPOL识别该中气旋个例正负速度对差值均为47 m·s-1,无变化,03:47:29—03:55:10期间XPAR识别该中气旋个例正负速度对差值经历了先减小、再增大、再减小的过程,甚至在03:50:33 时刻减小至SPOL的直线下方,而SPOL识别结果仅减小了很小的数值。图4所示中气旋个例B同理。由于识别正负速度对差值是现有中气旋识别算法中的第一步,也是非常重要的一个环节,因此,XPAR相比于SPOL在识别正负速度上的优势也能从一定程度上反映出识别中气旋的优势。
图5给出了03:42:01—03:54:00的SPOL的3.29°仰角观测到的中气旋个例A在径向速度图上的特征以及相应时刻中气旋中心方位的垂直剖面。

图5 2019年4月19日03:42:01(a,d), 03:48:00(b,e)和03:54:00(c,f) SPOL 3.29°仰角观测中气旋个例A的径向速度(a,b,c)和对应时刻的中心方位垂直剖面(d,e,f)(图5a~5c的黑色虚线方向为中气旋特征中心方位的径向方向,图5d~5f的黑色虚线标注即为中气旋特征中心距雷达的距离,下同)Fig.5 Radial velocity (a, b, c) and vertical section of center azimuth at corresponding time (d, e, f) of mesocyclone Case A observed by SPOL at 3.29° elevation at 03:42:01 BT (a, d), 03:48:00 BT (b, e) and 03:54:00 BT (c, f) 19 April 2019(The black dotted lines in Figs.5a-5c are the radial direction of the feature center of the mesocyclone, and the black dotted lines in Figs.5d-5f are the distance from the feature center of the mesocyclone to the radar, the same below)
其中图5a~5c的黑色虚线方向为中气旋特征中心方位的径向方向,需要注意的是,本文所述的特征中心方位均表示的是算法判断该被标记为二维中气旋的特征区域内由每个模式矢量动量加权所得的中心方位,和最大最小方位的中间值有所不同的是,该方位理论上来说是该特征区域强度最强,切向方向旋转速度最大的位置,因此不一定在特征区域方位的正中间,下文同理。图5d~5f的黑色虚线标注即为中气旋算法识别中气旋特征中心位置距雷达的距离。
由图5可以清晰地分辨出三个时刻明显的正负速度区域,且该区域随时间推移由西向东发展的过程,与算法识别结果吻合,因此SPOL可以较为直观地展现出中气旋的随时间的变化,但由于SPOL一个体扫时间较长(约6 min),因此从识别结果上来说无法给出更精细的中气旋参数变化,从图中也无法更加细致地分辨出整个涡旋在当前仰角内部的发展。垂直结构方面,可以看出由于仰角层分布不均,在中高层仰角有大量空白区域的存在,因此SPOL对于中气旋垂直结构的探测并不十分清晰,对于整个中气旋发展过程中相邻时刻各层仰角速度值的转变也较为突兀。再加上该算法所计算的中气旋中心为二维中气旋中所有模式矢量加权平均的结果,因此受其垂直分辨率的限制,较难对三维中气旋进行垂直结构的研究。
图6给出了03:41:20—03:55:10期间XPAR的2.70°仰角观测到的和SPOL相同的中气旋个例A在径向速度图上的特征以及相应时刻中气旋中心方位的垂直剖面。需要注意的是在03:53:38时刻,由于该特征内模式矢量数不足的原因,2.70°仰角识别该区域为二维风切变,未将其判断为二维中气旋,但对整个三维涡旋的中气旋判定没有影响,因此本文没有给出03:53:38的XPAR的径向速度及垂直剖面。

图6 2019年4月19日03:41:20—03:55:10 XPAR的2.70°仰角观测中气旋个例A的径向速度(a~e,k~n)和对应时刻的中心方位垂直剖面(f~j,o~r)Fig.6 Radial velocity (a-e, k-n) and vertical section of center azimuth at corresponding time (f-j, o-r) of mesocyclone Case A observed by XPAR at 2.70° elevation from 03:41:20 BT to 03:55:10 BT 19 April 2019
由图6可以清晰地分辨出9个时刻明显的正负速度区域,并随时间由西南向东北偏东方向发展,与算法识别结果吻合,因此XPAR可以较为直观地展现出中气旋的随时间的变化情况,图6a~6e,6k~6n的黑色虚线方向即为中气旋特征中心方位的径向方向;图6f~6j,6o~6r的黑色虚线标注即为中气旋算法识别中气旋中心位置的距离。可以看出由于XPAR仰角层分布较为均匀,因此从图中能够较为清晰地看出中气旋中心区域径向速度的垂直结构变化,即从低层仰角正速度居多,逐渐向中层仰角正速度居多的转变。
图7和图8分别给出了中气旋个例B持续时间内两部雷达识别的径向速度和对应时刻中心方位垂直剖面。相比于中气旋个例A的识别差异,图7和图8所示中气旋个例B的两部雷达识别结果差异更为明显,由于该中气旋仅覆盖了SPOL的两个体扫,因此对于该中气旋的发展情况更加难以分辨,在垂直剖面图中仅能分辨出大体上数值的变化,而从XPAR的垂直结构图中,虽然整个二维特征区域(临近黑色虚线)的速度值变化并不那么明显,但整个天气过程对于该区域的影响依旧非常清晰。

图7 2019年4月19日03:54:00(a,c)和04:00:01(b,d) SPOL的3.29°的仰角观测中气旋个例B的径向速度(a,b)和对应时刻的中心方位垂直剖面(c,d)Fig.7 Radial velocity (a, b) and vertical section of center azimuth at corresponding time (c, d) of mesocyclone Case B observed by SPOL at 3.29° elevation at 03:54:00 BT (a, c) and 04:00:01 BT (b, d) 19 April 2019
综合图3~图8可以看出,由于两部雷达时空分辨率的差异,XPAR对于二维中气旋的追踪性能更为优秀,可以清晰地看到西南方向负速度区域与东北方向正速度区域融合的过程,并且从识别结果(圆圈标记)中可以看到二维中气旋在整个单层仰角中的发展情况,与识别结果相符合。在垂直结构方面,XPAR也能清晰地分辨出随着时间推移该中气旋从低层正速度居多逐转变为中层居多的状态,而SPOL垂直剖面图并未展示出这一点,这从算法输出中的XPAR 2.70°仰角正负速度差值、SPOL 3.29°仰角正负速度差值也可以看出。因此,得益于更加均匀的仰角层分布,XPAR对于中气旋垂直结构方面的识别性能要更为优秀。

图8 2019年4月19日03:53:38—04:02:51 XPAR的2.70°的仰角观测中气旋个例B的径向速度(a~d,i~k)和对应时刻的中心方位垂直剖面(e~h,l~n)Fig.8 Radial velocity (a-d, i-k) and vertical section of center azimuth at corresponding time (e-h, l-n) of mesocyclone Case B observed by XPAR at 2.70° elevation from 03:53:00 BT to 04:02:51 BT 19 April 2019
算法输出结果方面,在识别中气旋地理高度相近的两层仰角(SPOL 3.29°,XPAR 2.70°),XPAR识别的绝大部分正负速度差值比SPOL要大,垂直延展性方面,XPAR识别的垂直延展厚度均大于SPOL,与预期结果相吻合。
2.2.2 回波强度特征
为了从多方面验证本算法识别的准确性及两部雷达识别结果的差异,本文对中气旋个例A和B的CAPPI反射率进行了分析,对比了两中气旋个例分别在两种雷达上的回波结构。
图9给出了SPOL 3.29°仰角03:42:01—03:54:00 三个时刻的中气旋个例A的CAPPI反射率图和XPAR 2.70°仰角03:41:20—03:55:10中相近三个时刻的中气旋个例A的CAPPI反射率图,其中黑色圆圈为前文所述中气旋个例A的位置。图10给出了SPOL 3.29°仰角03:54:00和04:00:01两个时刻的中气旋个例B的CAPPI反射率和XPAR 2.70°仰角03:53:38和04:01:18中相近两个时刻的中气旋个例B的CAPPI反射率图,其中黑色圆圈为前文所述中气旋个例B的位置。色标选择方面,为了方便对比相同中气旋个例在两部雷达上回波结构的一致性,同时对比说明两部雷达的衰减差异,本文选用同一色标。
由图9和图10可以清晰地看出,在CAPPI图上两部雷达识别的两个中气旋回波强度相近,且回波结构大致相同。从图9的9a~9c中可以大致看出整个天气过程自西向东的发展情况,但较难对回波内部的强度进行分析。相比于SPOL的观测结果,从图9d~9f中可以清晰看出XPAR识别该中气旋从最初所处的回波区域与邻近区域融合并逐步由西南向东北偏东方向发展,以及中气旋内部的回波强度变化情况,图10同理。但是由于XPAR的波长较短,导致衰减较为严重,难以观测到15 dBz以下的弱回波。垂直结构方面,XPAR的回波强度垂直结构可以清晰地看出在整个时间段内回波强度的垂直结构变化情况(强度中心逐渐从底层向高层移动),而SPOL的垂直结构图则未展现出这一点。

图9 2019年4月19日03:42:01(a,g), 03:48:00(b,h)和03:54:00(c,i) SPOL(a~c,g~i),以及03:41:20(d,j), 03:47:29(e,k)和03:55:10(f,l) XPAR(d~f,j~l)观测中气旋个例A的CAPPI反射率(a~f)及对应两部雷达该时刻的垂直剖面(g~l)Fig.9 The CAPPI reflectivity (a-f) of mesocyclone Case A and the vertical section of the two radars at that time (g-l) observed by SPOL (a-c, g-i), by XPAR (d-f, j-l) at 03:41:20 BT (d, j), 03:47:29 BT (e, k) and 03:55:10 BT (f, l) at 03:42:01 BT (a, g), 03:48:00 BT (b, h) and 03:54:00 BT (c, i) 19 April 2019

图10 2019年4月19日03:54:00(a,c)和04:00:01(b,d) SPOL的3.29°的仰角观测中气旋个例B的CAPPI反射率(a,b)以及03:53:38(e,g)和04:01:18(f,h) XPAR的2.70°仰角观测中气旋个例B的CAPPI反射率(e,f)及对应两部雷达该时刻的垂直剖面(c,d: SPOL;g,h: XPAR)Fig.10 The CAPPI reflectivity (a, b) of mesocyclone Case B observed by SPOL at 3.29° elevation angle at 03:54:00 BT (a, c) and 04:00:01 BT (b, d) and the CAPPI reflectivity (e, f) of the mesocyclone Case B observed by XPAR at 2.70° elevation angle at 03:53:38 BT (e, g) and 04:01:18 BT (f, h) 19 April 2019 and the vertical section of the two radars at that time (c, d: SPOL; g, h: XPAR)
2.3 二维特征识别数量差异
如前所述,SPOL和XPAR分别在03:42:01—03:54:00和03:41:20—03:55:10识别出了同一涡旋,由于在单层仰角内被标记为二维中气旋的特征数量会直接影响该特征隶属的三维涡旋是否被标记为三维中气旋,且由于中气旋个例B持续时间较短,内部的二维特征数量较少,因此图11给出了中气旋个例A在XPAR 03:47:29时刻和SPOL 03:48:00 时刻两部雷达识别出所有属于该三维中气旋个例的被标记为二维中气旋的特征的径向速度图。由于中气旋个例A在两部雷达当前仰角所含的特征数量较多,距离较为接近,且不是二维中气旋的特征在算法中仅起到了区分三维风切变和非相关切变的作用,对三维中气旋的判断并无影响,因此为了避免混淆,图11仅圈出了该时刻被标记为二维中气旋的特征。
为了方便对比,本文在图11a的三个特征上标注序号1~3,图11b的三个特征上标注序号4~6。经过地理坐标换算,序号1和4,序号2和6分别是同一个特征,其中图11b中4号特征在图中可以发现可能是由于速度模糊问题被误判,但从图11a的1号特征中并未观察到明显的速度模糊情况,因此在应对速度模糊问题方面两部雷达识别结果也能进行一定程度上的互补。对于被XPAR识别的3号特征,经过中间值查询,发现在SPOL识别结果中由于内部能够形成模式矢量的速度对太少,没有被归结为能够形成中气旋的特征。对于被SPOL识别的5号特征,经过中间值查询,发现在XPAR识别结果中由于其特征内部所含的模式矢量相距过远,且由于5号中气旋在XPAR上对应位置离雷达距离较远,因此衰减较为严重,再加上回波面积较大导致有些弱回波观测不到,因此未被判断为有效特征。
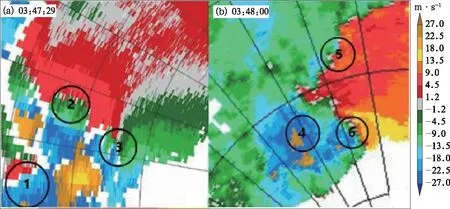
图11 2019年4月19日XPAR(a)和SPOL(b)分别在03:47:29与03:48:00时刻识别出三维中气旋个例A中所有二维中气旋的径向速度(黑色圆圈为二维中气旋区域)Fig.11 All 2D mesocyclone radial velocity maps identified by XPAR (a) and SPOL (b) in 3D mesocyclone Case A at 03:47:29 BT (XPAR) and 03:48:00 BT (SPOL) 19 April 2019(The black circle is the 2D-mesocyclone area)
总体来说,两部雷达识别的同一中气旋个例内特征数基本相同,但由于水平分辨率差异(SPOL径向距离库大),导致有些正负速度对未被识别。而XPAR由于波长小,因此强回波的衰减较为严重,导致有些稍弱的回波观测不到,直接影响了中气旋的识别性能。
3 退速度模糊
首先,由前文所述,XPAR速度模糊问题较为严重,而速度模糊会导致虚假的中气旋识别,因此如何处理速度模糊问题是改善中气旋识别结果的一个重要部分。前文所述中气旋个例皆是正确识别的中气旋,虚假中气旋分析及处理方法仅存在于本节所述内容。
本文最初的想法是依次对所有径向库上的速度从近到远做退速度模糊,即寻找同一径向上相邻速度跳变过大的区域(正负速度差值大于50 m·s-1),然后在该径向上将该区域的第一个速度假设为正确的径向速度,将后一速度加上或减去前一速度与最大不模糊速度(XPAR最大不模糊速度为32 m·s-1)之间的差值,再将后一速度更正为得到的新速度,以此类推。处理后的效果如图12所示。
由图12可见,SPOL退模糊效果较好,含有速度模糊情况的橙色区域基本更正为了深蓝色区域,但在图12c和12d中,XPAR由于数据质量等原因,存在很多极小的空白区域(无效径向速度),这些空白区域影响了该退模糊方法的进行,导致无法进行有效的速度退模糊。

图12 SPOL(a,b)和XPAR(c,d)经过简易退模糊前(a,c)、后(b,d)效果对比Fig.12 Effect comparisons of SPOL (a, b) and XPAR (c, d) before (a, c) and after (b, d) simple deblurring
由于研发一种适应相控阵天气雷达的退模糊算法较为复杂,因此本节从中气旋识别算法逻辑本身入手,将可能由于速度模糊导致的虚假中气旋标记出来,后期由人工进行判断。由前文可知,在算法中存在一个被标记为二维中气旋的特征和被标记为二维风切变的特征这一概念。而对于三维涡旋来说,若同一涡旋内只要存在大于等于2个二维中气旋,则该涡旋被判定为三维中气旋;若同一涡旋内存在一个二维中气旋,另存在大于等于1个二维风切变,则该涡旋被判定为三维风切变;若同一涡旋内二维中气旋和二维风切变总数为1,则被判定为非相关切变。由此可知,同一涡旋内二维中气旋的数量直接决定了该涡旋是否为三维中气旋。因此,本文从单个被标记为三维中气旋中的所有二维中气旋入手,若一个二维中气旋中最大最小速度均超过±26 m·s-1,且一个三维涡旋中符合该条件的二维中气旋数量占总数的50%以上,且覆盖仰角层数也占50%以上,就把该三维中气旋标记为可能由于速度模糊识别的错误中气旋,再由人工进行判定。图13 和图14分别给出了两个时间段以验证该方法的有效性。
由图13可以看出,图13b中黑色圆圈标注部分被识别为二维中气旋,且存在速度模糊情况,因此算法将该中气旋标记为可能由于速度模糊识别的错误中气旋。经人工核查发现,该时刻的前后两相邻时刻并未识别出二维中气旋,因此确定该时刻是由速度模糊引起的虚假三维中气旋识别。
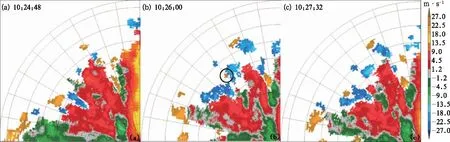
图13 2019年4月19日XPAR识别出可能由于速度模糊导致的虚假二维中气旋(b)及其前后相邻两时刻(a,c)的径向速度Fig.13 The false two-dimensional mesocyclone identified by XPAR (b) and its related factors probably caused by velocity ambiguity radial velocity diagram of two adjacent moments (a, c) on 19 April 2019
由图14可以看出,图14b中左侧黑圈部分存在速度模糊情况,且后一时刻(图14c)左侧黑圈部分也有速度模糊情况发生,因此算法将该中气旋标记为可能由于速度模糊识别的错误中气旋。但经人工核查发现,该时刻及前后两个相邻时刻均含有不存在速度模糊区域的正确识别的二维中气旋,因此虽然该二维特征被误判为二维中气旋,但并不影响三维中气旋的判断结果。

图14 同图13,但为不同时刻Fig.14 Same as Fig.13, but at different times
4 结 论
利用S波段双偏振雷达、X波段相控阵雷达及其地面观测数据、美国中气旋探测算法,分析了2019年4月19日发生在广州的一次中小尺度天气。对两部雷达识别出的两个三维中气旋个例的识别结果进行了对比,并从径向速度和反射率两部分进行了验证。结果表明:
(1)该算法能较为有效地识别出中小尺度天气过程中的正负速度对,并通过两步筛选(动量/切变阈值、距离阈值)得到具有典型中气旋参量的特征,并对特征进行三维(垂直距离)判定,最后得到中气旋、三维切变、非相关切变。
(2)由于时间分辨率的差异,理论上XPAR识别中气旋的生命史要长于SPOL。从中气旋生成时间来看,XPAR识别中气旋的生成时刻要早于SPOL,且该时刻处于SPOL识别的生成时刻的6 min 内;但从消亡时间来看,XPAR识别该中气旋消亡时间要晚于SPOL,且该时刻处于SPOL识别的消亡时间之后的6 min内,因此该结果是合理的。
(3)SPOL可以较为直观地展现出中气旋的随时间的变化情况,但由于其一个体扫时间较长(约6 min),因此无法更加精细地探测到整个涡旋的发展情况。且由于仰角层分布不均,导致对于中气旋垂直结构的探测并不清晰,再加上该算法计算的中气旋中心为二维中气旋中所有特征向量加权平均的结果,因此受其垂直分辨率的限制,较难对三维涡旋中存在的中气旋进行垂直结构的研究。并且由于SPOL库长较长(250 m),导致有些正负速度对未被识别,并且识别出的正负速度差值较小,影响了对中气旋的识别性能。
(4)XPAR可以直观地展现出中气旋的随时间的变化情况,且由于XPAR一个体扫时间较短(约1.5 min),使得对于中气旋的追踪性能更为优秀,可以清晰地分辨出中气旋的发展状况。并且由于XPAR仰角层分布较为均匀,因此从图中能够较为清晰地看出中气旋中心区域的垂直结构,识别出的中气旋垂直延展厚度也较SPOL更高,同时识别的正负速度对差值也更大。但由于XPAR波长较短,因此衰减较为严重,在回波面积大、强度强的情况下,对弱回波的观测效果还存在不足,难以观测到15 dBz以下的弱回波。
(5)对于同一个三维涡旋内,XPAR和SPOL识别的二维特征个数大致相同,结果从速度图和输出参数上来看也较为合理。但由于文中SPOL库长较长,而XPAR则衰减较为严重,两部雷达识别的中气旋结果可能无法做到严格一一对应,因此若是能够将两部雷达的中气旋识别结果合理结合,对于未来中气旋识别及强对流天气的预报可以提供更好的帮助。
(6)总体上,虽然XPAR衰减较为严重,但因其扫描速度较快,识别的中气旋内部结构变化较为清晰,而SPOL虽然衰减很小,但其扫描速度远慢于XPAR,因此对于中气旋的快速发展变化及其识别研究XPAR有明显优势。对于各类强天气过程、云和降水物理的研究,衰减很小且能提供偏振参量的S波段双偏振雷达具有明显而独特的优势,今后的研究中将考虑如何更好地将偏振参量应用起来。
