基于PLC 的高压氧舱气源自控系统的设计与应用
2022-03-21张敦晓
林 鑫,时 光,张敦晓
(1.兴安盟人民医院,内蒙古乌兰浩特 137400;2.解放军总医院第六医学中心,北京 100048)
0 引言
随着医学事业的发展,高压氧治疗的应用也越来越广泛,在突发性耳聋、一氧化碳中毒、脑外伤、挤压伤、放射性损伤、气栓症、减压病、糖尿病足溃疡、多发伤等疾病的治疗中,具有疗效显著、安全性高、副作用小等特点。高压氧治疗是指在高压的环境下吸高浓度氧气的治疗,高压氧舱是进行高压氧治疗的唯一医疗设备,按照加压介质分为氧气加压舱、空气加压舱两种。氧气加压舱,采用纯氧进行升压,由于氧气的易助燃性,为保障高压氧治疗的安全,现阶段各大中型医院已逐渐淘汰。空气加压舱,是指以空气为介质进行升压的高压氧舱,GB/T 12130—2005 中规定,舱内氧浓度不得超过23%,其具有安全性高、治疗人数多等特点,符合目前高压氧治疗的应用越来越广泛的需求。
1 系统简介与构成
气源共有3 组制气机组、2 组储气罐,每组制气机组均包含空压机、冷干机、散热风机等,每组储气罐均包含4 个并联储气罐(表1)。
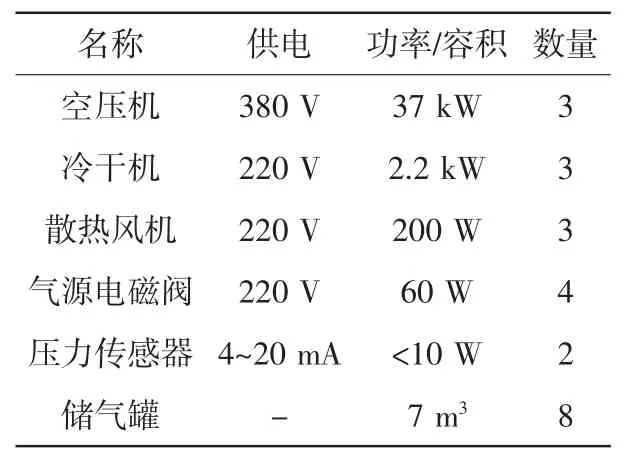
表1 气源各设备参数
空压机启动和关闭各由其面板上的两个自动复位触点开关PB 控制。冷干机的启动由1 个常开开关SB 控制主电路继电器构成自锁启动,其关闭由主电路串联的1 个常闭开关SB 控制。散热风机、电磁阀启动和关闭的控制原理与冷干机启闭原理相同,即1 个常开开关SB 控制启动,1 个常闭开关SB 控制关闭。
本研究所述的基于PLC 的高压氧舱气源自控系统总体结构包含上位机、PLC、参数采样模块、接触器控制输出模块、组态软件等,系统结构如图1所示。
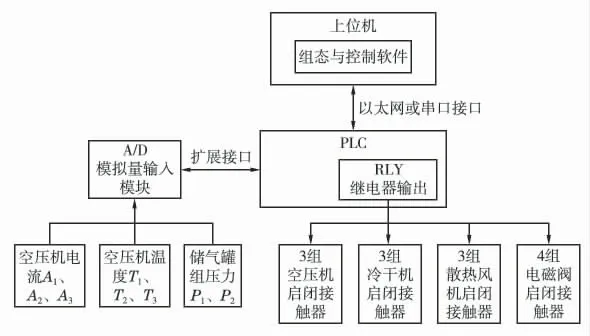
图1 系统结构组成
上位机通过串行总线访问PLC 的A/D数据采集模块,获取3组空压机温度值T1、T2、T3,2 组储气罐气压值P1、P2,以及3 台空压机工作电流A1、A2、A3。上位机的组态与控制软件通过P1、P2值进行空压机启闭和储气罐电磁阀启闭的判断,通过T1、T2、T3进行散热风机启闭的判断,通过系统日期进行冷干机启闭逻辑的判断。
2 硬件设计
2.1 上位机
上位机采用研华IPC-810E,通过串行总线与PLC 进行通信,访问PLC 的参数采样模块和接触器控制输出模块(图2)。
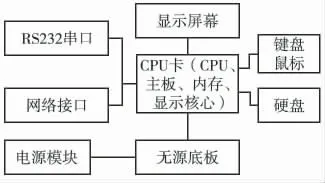
图2 研华IPC-810E 结构组成
IPC-810E 可在Windows XP 操作系统下完成系统组态及监控软件的设计、开发。上位机通过网络接口或串口连接PLC的以太网接口或信号板RS232 接口,向其发送参数采集指令,PLC 返回系统所需的储气罐压力值、空压机温度值、空压机电流值等采样数据,对气源各设备参数进行监控,同时可实现对气源各设备运行状态的远程手动控制,以及可查询各设备历史运行状态。
2.2 PLC、参数采样模块、输出扩展模块选型
分析气源各设备参数,得出电路多为感性负载,且控制频率低、控制回路电流相对较大,因此PLC 选型为继电器输出型,型号为西门子S7-200 SMART SR40。S7-200 SMART SR30 为标准型CPU 模块,继电器输出,220 VAC 供电,具有18 个输入点,12 个输出点,具有可靠性高、编程容易、组态灵活、输入/输出模块功能齐全、安装方便、运行速度快、模块化结构、易于实现分布式的配置、性价比高、电磁兼容性强等特点。
2.3 控制电路
空压机的温度传感器输出为4~20 mA,无电流传感器,需在空压机配电柜供电主线路上添加电流传感器、变送器输出为4~20 mA。储气罐压力传感器输出为4~20 mA。
S7-200 SMART SR30 为继电器型输出,每路最大为2 A,但因输出设备较多、PLC 功率无法满足极特殊情形下的满负荷控制,因此为提高系统的稳定性,S7-200 SMART SR30、EM DR08 输出端在控制空压机、冷干机、散热风机、储气罐组电磁阀启闭时需添加中间继电器,中间继电器采用SSR(Solid State Relay,固体继电器)。
S7-200 SMART SR30 控制常开SSR1 延时通路时,主电路继电器KM1 控制线圈得电,主电路通路,形成互锁,1#空压机启动,延时结束SSR1 恢复常开;控制常闭SSR2 延时断路时,主电路继电器KM1 控制线圈失电,主电路断路,1#空压机关闭,延时结束SSR2 恢复常闭。控制原理类似,2#空压机由SSR3 控制启动,由SSR4 控制关闭;3#空压机由SSR5 控制启动,由SSR6 控制关闭;1#冷干机由SSR7 控制启动,由SSR8 控制关闭;2#冷干机由SSR9 控制启动,由SSR10 控制关闭;3#冷干机由SSR11 控制启动,由SSR12 控制关闭。
散热风机、储气罐组电磁阀的工作电流较空压机、冷干机小,因此无需采用交流接触器,SSR 即可满足电流需求。1#散热风机由常开SSR13 控制启动和关闭,2#散热风机由常开SSR14控制启动和关闭,3#散热风机由常开SSR15 控制启动和关闭,1#储气罐组电磁阀由常开SSR16 控制启动和关闭,2#储气罐组电磁阀由常开SSR17 控制启动和关闭。
3 软件设计
3.1 上位机监控软件
上位机研华IPC-810E 安装、运行由Delphi7.0 开发环境编译、调试的监控软件,监控软件包含运行组态模块、数据记录模块、历史运行数据查询模块等。
系统设备的运行组态模块用于直观显示气源控制系统中各设备、传感器的运行状态或参数采样值。
数据记录模块首先获取串口返回字符串,字符串为16 进制,共24 位,字符串格式为:起始位4 位+1#储气罐组压力传感器采样值2 位+2#储气罐组压力传感器采样值2 位+1#空压机温度传感器采样值2 位+2#空压机温度传感器采样值2位+3#空压机温度传感器采样值2 位+1#空压机电流传感器采样值2 位+2#空压机电流传感器采样值2 位+3#空压机电流传感器采样值2 位+终止位4 位。然后程序根据字符串格式解析出各参数的采样值,再通过Chart 进行赋值并时时画出曲线。
3.2 气源自控流程
气源的自动控制通过控制系统循环采集1#、2#储气罐组的压力采样值与系统设定的启动压力Pmin、关闭压力Pmax做比较。系统设定Pmin为0.6 MPa,Pmax为1.3 MPa,在储气罐组压力低于0.6 MPa 时,改组储气罐组的前端电磁阀打开,后端电磁阀关闭,另一组储气罐组的前端电磁阀关闭,后端电磁阀打开,同时1#制气机组冷干机、空压机启动,待空压机油温温度高于85 ℃时,散热风机启动。2 min 后启动2#制气机组,4 min 后启动3#制气机组。待储气罐组压力高于Pmax时,依次关闭1#、2#、3#制气机组,然后进入下一个采样循环比较过程。
4 应用效果
制气机组运行稳定。机组中空压机的启闭程序较为复杂,空压机启动时先触发三相电动机星形启动,待油压升高至0.2 MPa后,空压机改为角形全负载运行,同时开启供气电磁阀向储气罐供气,其复杂的启闭程序受空压机内置PLC 控制。系统设计采用S7-200 SMART SR30 控制空压机操作面板按钮通断的方式,在保证空压机独立稳定运行的前提下大大简化了控制线路及程序。
高压氧舱的气源自动化的运行提高了医务人员工作效率。应用PLC 控制气源自动化运行后,可根据压力信号自动切换储气罐组供气,代替了操作人员切换气源的工作。同时,机组制气过程中,PLC 可根据空压机油温自动启闭散热风机,实现了全程无人托管式的自动化运行,大大降低了制气工序所需额外的人工工作量。
5 结语
本研究采用PLC 作为控制器,控制SSR 驱动不同制气机组设备运行的方法,在满足高稳定性的前提下,具有速度快、可靠性高、电磁干扰小等优点,尤其在发生故障时,医务人员可在现场对故障机组进行快速隔离,使得制气工序不受影响,高压氧治疗不因制气设备故障而间断。临床应用表明,气源采用PLC 控制自动化运行后,在大大提高医务人员工作效率前提下,其故障率是极低的,值得应用于各大高压氧气源中心。PLC 作为高压氧舱及其附属设备将来的主要控制方法,其自动化的应用是大势所趋,新建或翻修高压氧舱气源时,应当考虑采用空压机组原厂PLC 集成控制的方法策略。
