工业机器人技术在智能制造领域中的应用
2022-03-21山东技师学院冯可铮
山东技师学院 冯可铮
现如今,我国制造领域呈现出迅猛发展,且急需产业化转型。虽中国被誉为世界制造强国,但是制造技术有待持续提升,最终方才可真正地成了制造业大国。尤其在转型途径中,信息基础设备的建造为势必强化的方面,针对工业机器人了来讲,归属于将来核心制造业中,且在将来智能制造行业中势必承担起更为主要的任务。针对工业智能装备制造此领域,基本配套设施自身则为一台工业智能机器人,如何达成工业生产管控效率的提升,及其产品安全性提高,主动展开过往工业生产线中的琐碎任务,急需一台工业智能机器人系统协助完工。文章率先讲述了工业机器人在国内智能装备制造有关行业的主要角色定位,随后针对国内工业制造机器人在国内智能装备加工生产有关行业使用中的实践应用状况实施了具体全面地阐述解析。
1 工业机器人概念阐述
机器人此定义早期就有定论,无论借助过往电视机,抑或者借助互联网平台,大众针对机器人或多或少有大致了解,同时部分单一的机器人已投入应用在日常生活中。就目前来讲,世界上暂时没有针对机器人给出详尽的统筹概念,但是大致整个定义状况遵循的基础准则完全类似,其部分细节方面有差异化。然而,国家标准化机构ISO简要阐述了一个概念,即针对工业机器人阐述为工业机器人为能够达成自动操控及其反复编程的具备数个自由度的及其各种功能的操控机器,能够达成工具操控及其原料运输,最后实现一连串操控工作。目前,绝大部分国家比较赞同此概念。从中不难发现,国内工业机器人技术仍处于初级阶段,因此,将来工业机器人技术持续发展实践中,此概念也会不断获得丰富。
国内机器人加工制作起步于20世纪中后期,经历了数十年不懈努力发展,国内已拥有了数个独有的工业机器人科研机构与单位。工业机器人绝大部分通过主体、驱动及其控制系统组成。其中主体部分包含了囊括机座、执行机构,及其臂、腕、手部,绝大多数机器人拥有三至六个运动自由度,其中腕部位置1至3个;驱动系统包含了动力装置和传统机构,可推动执行架构呈现效用;控制系统则为代表通过输入程序面向驱动系统传送执行机构给出的指令,针对其高效管理。详尽工业机器人架构图如图1所示。
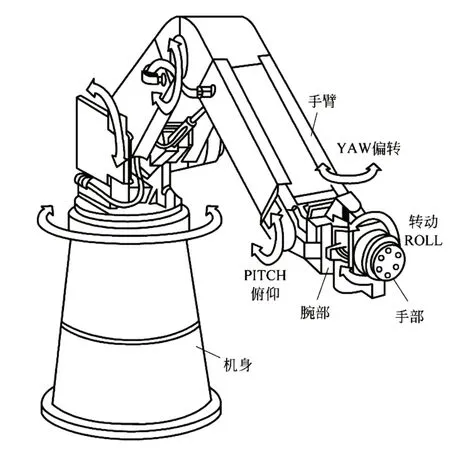
图1 工业机器人构成Fig.1 Composition of industrial robots
2 根据工业机器人智能制造单元的硬件架构设计
依据工业机器人智能制造单元的设计实践中,其中硬件架构设计为单元设计的根本,针对工业机器人智能化制造达成产生深远影响。尤其在工业机器人智能制造单元设计中,急需依据工业机器人工业制造实践状况采取硬件系统的创建,而在一般工业加工制造实际中,智能制造单元基本程序牵扯到原料上下、制作、检测及其分拣等功能。依据工业机器人智能制造单元设计中,具体硬件系统创建工作程序如图2所示。随后依据工业机器人智能制造单元设计硬件系统架构中,核心硬件架构包括了:总控系统、存储单元、执行系统、加工系统、检测系统、分拣单元以及相关辅助设施等。然而,在实践设计中,整体操控系统通过PLC系统来完成,储存单元即为制造系统自动料仓,工业机器人则为执行单元,工业生产线数控机床则为加工单元,CCD则为检测单元。
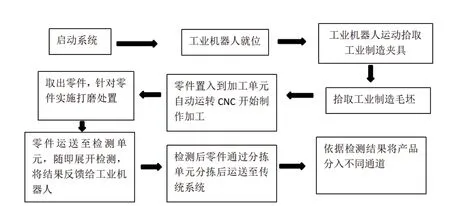
图2 工业机器人智能化制造工作程序流程图表Fig.2 Flow chart of the working procedure of intelligent manufacturing of industrial robots
根据工业机器人智能制造单元硬件系统创建中,总控体系为硬件系统构建的核心要素。要想确保工业机器人加工制作的顺利展开自动化,则需利用PLC控制系统来完成,借助PLC控制系统远程操控和自动化操控,可完成针对硬件系统架构中执行、加工、分拣、仓储、检测等功能系统的通信与操控。尤其在实践设计当中,利用西门子S7-1200系列PLC控制设施。存储单元为工业机器人智能制造单元中的料仓架构,为工业生产原料及其料坯储存位置。且储存单元可依据总控体系命令,把有关原料推出,完成工业机器人生产中原料索取。执行单位为工业机器人,参照总控体系加工命令实施生产计划。制作单元为工业生产的数控机床,参照工业制造的设计诉求实施工业制造计划。尤其在实践中,则筛选西门子828D当作制作单元的系统架构,可实现智能制造单元设计实践诉求。打磨单元利用气缸来达成操作,尤其在现代工业加工制造打磨系统设计中,借助工业机器人来完成。把工业机器人末端工具代替成为打磨系统,随后利用系统编程,经过工业机器人完成针对零部件的打磨处置。分拣单元通过汽缸与传递系统协同构成,依据总控系统输出命令针对传统系统状态实施操控,参照汽缸动作程序,把打磨好的零部件分拣开。检测单元为参照针对零部件的检测,把测试结论回馈到总控系统。总控系统参照检测结论信息针对汽缸实施操控,最终把不一样的检测信息零部件分别处置。
3 工业机器人在智能制造领域中的具体使用解析
3.1 焊接机器人在智能制造行业中投入使用
现阶段,焊接机器人重点投入使用领域在汽车制造行业中,尤其为消声器、底盘及其座椅骨架等焊接工作当中,利用焊接机器人对于汽车上的部分零件采取搭接及其角接,从而保证汽车整体安全性。比如:日本丰田汽车利用了点焊机器人,对比过往焊接技艺,加大提高了焊接品质,与此同时改进了焊接流水线,极大降低了整个生产线长度。当前众多制造行业中,对于焊接位置精准度要求越来越高,基本设置了电弧传感器及其激光传感器等科学的设施,能够针对焊接达成全自动的追踪焊接成效,实施焊接过程中,可以将焊接轨迹及其焊接程序随意自动变化。不仅如此,在铁路机械及其船舶制造领域中牵涉面也非常广。从而不难看出来,智能制造已成为将来发展的主流趋向,大量的精致化焊接任务需要通过焊接机器人来提供协助,最终达成工作任务。此外,按照性能指标划分不同,可将机器人划分为五大类型,即超大型焊接机器人、大型焊接机器人、中型焊接机器人、小型焊接机器人、超小型焊接机器人。如表1所示。
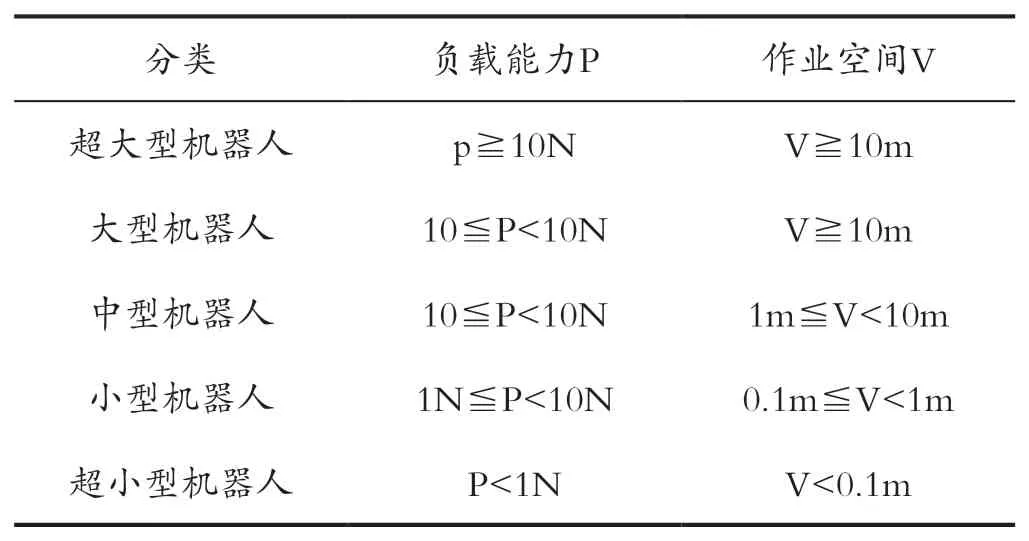
表1 不同焊接机器人功效Tab.1 Efficacy of different welding robots
3.2 搬运机器人在智能制造行业中的投入使用
伴随着智能制造技术的深入,过往搬运机器人已不能胜任制造诉求,基于此,大量的创新型搬运机器人被开发出来,部分创新型搬运机器人被应用了大量先进科学技术,当中非常熟悉的则是六轴搬运机器人。目前,伴随着科学技术水平的不断提升,搬运机器人最大负荷能力也获得了前所未有的提升。同时能够实现垂直方向上5m范畴之内的多种搬运任务。近些年,国内所利用的大部分为并联机器人,其可完成最大6个自由度,日常常见的是Delta机械手,其精密度较强,可以操控士0.1mm,毕竟研发较晚,以至于在搬运机器人此技术上,我国整体技术水平仍有滞后于国外等发达国家。
3.3 钢铁行业智能制造实践中所采取的多种工业机器人
(1)自动拆捆机器人。在钢铁生产技艺中,冷轧带钢为借助钢卷方法来完成制造的,其制作出钢卷前,需要将其拆捆、开卷及其穿戴,随后在增速到相对正常的速率实施加工制作。最终势必会延长整体生产周期。随后借助自动拆捆机器人可以致使前一道程序机组产生的钢卷完成自动化的捆带剪断操控,并且针对自动拆捆机器人来讲,机头能够完成旋转操作机器横向位移,同时能够针对卷边机器捆带方位实施自动测定。把捆带剪接完成之后,针对自动拆捆机器人来讲,能够把剪裁好的捆带实施自动压实,此时整体尺寸与体积被压缩至最小化,随后再自动卸掉废弃材料中随机处置。利用自动拆捆机器人,可以极大缩减整体工作流程时长,同时提升了整体操控安全性。
(2)自动取样机器人。借助自动取样机器人的应用,尤其在生产实践中,可对于钢板进行自动取样操控及其打标记操控,针对自动取样装置来讲,需借助4个立放样板斗、一台机器人、一个平方样板斗、一套取样贴标夹具及其平头推出机构所组成。一般状况下,针对自动取样装置来讲,在机组取样剪接之后,则会针对取样小车内包含的试样板实施贴标操控,随后再把其运送至对应的料斗中。借助此种机器人应用,可以极大降低整体劳动强度,并且可极大提高品质进程中的操控平稳性。
(3)自动贴标签机器人。一般情况下,针对冷轧制造技艺程序来讲,钢卷实施打捆操控之后,钢卷会随着钢卷小车一并送至对应的贴标工台上,此时,自动贴标签机器人会收到命令。随后逐步开始标签打印、拾取及其粘贴操控。此种机器人借助真空原理针对标签实施吸附,且也可把钢卷宽度及其直径大小核算出来,随后贴标头机械臂则会立刻位移到需要采取贴标的平台,紧接着吸附有标签的贴标头则会率先压在急需贴标的位置,随后借助辊轮把标签整平,此时标签已经贴在对应位置上。随后机器人则会返回最初初始状态。利用此种机器人,可以极大地完成整体贴标程序的智能化操控工作。
4 结语
总而言之,随着机器人技术的突飞猛进,工业机器人随之在智能制造行业中应用越来越宽泛,其中仿生学在机器人的投入使用中,可让机器人模仿人类的精细化动作,进一步实现传统制造行业中需手工操控的一连串的工作内容,从而提升焊接质量,确保整体智能制造生产效率。不难看出,将来工业机器人势必成了制造加工流水线的主打,其在智能制造行业中做出突出贡献。
