火电厂灰库安全清理机器人控制系统设计
2022-03-20董飞英
董飞英
(上海上电漕泾发电有限公司,上海 201507)
灰库作为锅炉的重要配套设施,在掺烧经济煤种的行业背景下,灰库发生黏壁、板结、搭桥等问题的频次明显增加,严重影响机组的安全及经济运行。
人工清理灰库的危险系数极高[1],为此开发一套火电厂灰库安全清理机器人,替代人工进入灰库进行清理作业,从而减少意外伤亡事故的发生,保障“零死亡、零事故”安全目标的实现[2-3]。
1 火电厂灰库概述
某电厂2台锅炉设原灰库、粗灰库、细灰库3座灰库,灰库为水泥结构,用于收集并短期储存除尘器和第二烟道来的飞灰。3座灰库容量相等,总高度30 m,直径15 m,有效高度16 m,有效容积2 720 m3,人孔门高度13.1 m,人孔门直径Φ600 mm×800 mm,顶部释放孔Φ530 mm×14 mm),能满足锅炉最大连续蒸发量(MCR)负荷45 h灰量的储灰要求。
灰库立面图如图1所示。灰库储灰层板底如图2所示。
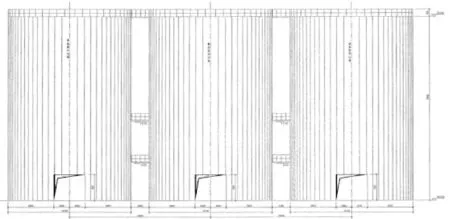
图1 灰库立面图

图2 灰库储灰层板底
2 安全清理机器人结构设计
安全清理机器人本体结构主要由释放孔辅助吊装装置、高刚度伸缩机械臂、水平旋转关节、竖直旋转关节、清灰机器人、辅助照明与监测单元等构成,如图3所示。

图3 清灰机器人整体架构
安全清理机器人采用库顶释放方式,利用释放孔辅助吊装装置的快装机构实现机器人与库顶释放孔的刚性连接,配合辅助支撑装置实现机器人在灰库的稳固安装,通过竖管快速地连接下放整机。通过水平旋转关节、竖直旋转关节实现清扫伸缩臂的水平往复旋转,利用设置于机械臂两端的滚筒状旋转毛刷完成壁面除灰作业。灰库璧面清理模式如图4所示。
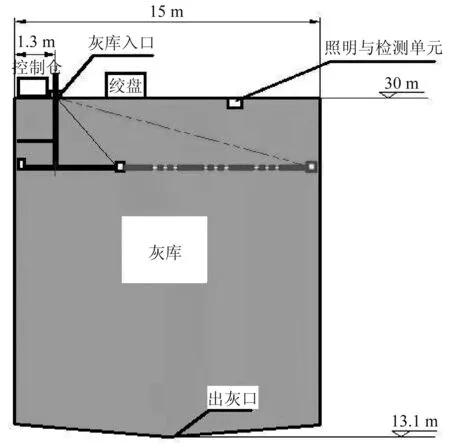
图4 灰库璧面清理模式
高刚度伸缩机械臂上端与吊装装置刚性连接,连接后具备水平回转、竖直回转、水平伸缩三自由度可控运动性能。用于提供清理机器人及专用清理装置的可靠支点,主要由水平回转结构、竖直回转机构、水平伸缩机构、自适应柔性末端、辅助牵拉结构、环境感知单元、综合防尘结构等部件构成。
3 安全清理机器人控制系统总体设计
安全清理机器人控制系统总体框架以施耐德M241PLC作为主控模块,传感器系统有激光测距、激光雷达模块和深度相机模组。运动控制系统是通过驱动电路与电机实现清扫以及机械臂的回转。
3.1 系统硬件部分设计
控制硬件方面主要是针对应用场景、功能需求及电路设计的合理性进行设计,根据整体硬件设计框架、各硬件模块的选型及总体硬件原理图等,可得出一个相对可行的低成本硬件设计方案。
3.1.1 主控模块
在设计中机器人以施耐德M241 PLC作为主控模块。主控模块使用24 V直流电源,包括一个实时时钟系统,随机存取存储器 (RAM)容量64 Mbit,其中8 Mbit可用于执行应用程序,闪存128 Mbit用于断电时保存程序与数据,内置I/O口 。主控模块可使用以下几种通信端口:CANopen Master、以太网、USBMini-B、串行通信端口1和串行通信端口2。
3.1.2 激光测距模块
激光测距模块使用深达威SW-LDS50B,可提供0.05~50.00 m的非接触式距离感测功能。
激光测距仪一般采用脉冲法和相位法2种方式来测量距离。该传感器采用相位法测距原理,通过测量回波信号的相位并与发射信号的相位进行比较实现测距。在户外或者条件恶劣的测量环境下也能保证较高的测量精度。
PLC、电脑和激光测距联合调试接线图如图5所示。

图5 PLC、电脑和激光测距联合调试接线图
3.1.3 深度相机模块
深度相机模块使用Smart ToF TC_E2模组,该模组是基于飞行时间(Time of Flight,简称TOF)技术的小型深度CCD相机模组产品[4-9],可通过Micro USB 2.0 接口以 60 fps的速度输出QVGA(320 mm×240 mm)尺寸的深度图、灰度图及点云图。产品采用850 nm LED光源,配合独特的光学、电子、结构设计而成,支持外部供电。测距范围可达6 m,精度可达毫米级。
该深度相机可用于识别灰库上的黏结物,通过通用串行总线的形式传输数据。
3.1.4 电机驱动电路
主控模块M241 PLC支持CAN通信,通过CAN总线发送控制信号给电机驱动器,然后驱动器控制电机的运动。清灰机器人电机驱动部分原理如图6所示。

图6 电机驱动电路部分原理示意图
3.2 系统软件部分设计
系统软件设计主要包含路径规划算法和电机驱动控制方案。
3.2.1 路径规划算法
路径规划算法的主要目的是研究人工智能技术在各种环境下某系统的自主推理、规划和控制的能力。考虑到清扫任务的需要, 为提高机器人的工作效率,有必要为机器人进行合理的路径规划。首先通过深度相机、激光雷达等传感器识别出灰库壁上的黏结物,然后规划出一条速度最快的路径使清理机器人迅速移动至黏结物处。采用点到点的路径规划方式,移动机器人根据自身的传感信息自行规划出一条从起始点到目标点的安全可行路线,路径规划算法采用遗传算法[10-11]。路径规划算法原理如图7所示。

图7 遗传算法流程图
3.2.2 运动控制方案
通过CAN总线的方式控制驱动器从而控制电机,主控模块通过CAN总线给每一台驱动器发送控制指令,由驱动器控制电机运动,搭载在机器人上的传感器系统将机器人的运动状态以及灰库的库壁情况反馈给上位机,电机运动状态通过读取电机编码器上的参数来确定。
上位计算机位于灰库上,可完成人机界面交互、环境初始值的输入、作业任务的安排、机器人路径的规划和机器人的状态显示等。下位计算机位于机器人的机械本体上,接受来自上位计算机的命令,传送机器人的信息,检测和控制机器人运动机构和清扫作业装置的工作等。脐带多股电缆线用来传递信息和输送动力。
激光测距和激光雷达模块用来检测机器人的位置和姿态。安全清理机器人上的激光测距仪用来检测清扫刷与壁面之间的距离信息。深度相机既可以显示机器人周围的状况,又可以检测清扫情况。
4 结语
本文对火电厂灰库安全清理机器人的控制系统进行深入分析,主要完成了以下几方面的工作:介绍了清理机器人的结构;在硬件设计方面,分别从主控系统、传感器部分、驱动电机部分等功能模块阐明了设计思想、方案论证和具体电路的实现,为后续软件设计工作提供硬件开发平台;在软件设计方面,从机器人路径规划以及运动控制方面阐明了设计要点,以及方案实现方法,通过计算机与主控模块以及主控模块与各大功能模块的互连,实现在线调试,进一步验证了硬件电路设计的合理性。
