两种构型码垛机器人运动学与静力学对比分析
2022-03-19胡旺宁
胡旺宁
(上海捷勃特机器人有限公司,上海 200030)
码垛机器人作为一种通用型自动化设备,因其负载能力大、工作节拍快、结构紧凑、可靠性好等优点,在众多行业的生产、仓储、物流等环节的应用越来越广。码垛机器人按构型分为混联码垛机器人和关节码垛机器人[1]。对码垛机器人构型的研究有助于对其性能特性的理解,从而在开发码垛机器人时选择合适的构型。
混联码垛机器人的构型特点是:第2、3轴采用滚珠丝杠驱动,通过连杆机构实现末端在竖直平面内的定位,借助辅助平行四边形保持末端的水平姿态。日本不二开发的“FUJI ACE”系列混联码垛机器人采用直线运动设计原理,实现竖直平面内运动的解耦[2]。李金泉等[3]开发的TH50型码垛机器人采用三角形原理将滚珠丝杠的直线运动转化为第2、3轴的旋转运动,从而实现末端定位。混联码垛机器人因其具有的滚珠丝杠结构,在结构紧凑性、整机刚性和维护性上面受到了制约。关节码垛机器人的构型区别于混联码垛机器人的地方在于用关节减速机代替了滚珠丝杠,在结构紧凑性、工作节拍和维护性上面得到了较大提升[4]。关节码垛机器人根据构型特点分为双平行四边形码垛机器人和单平行四边形码垛机器人,其中双平行四边形码垛机器人含有1个主平行四边形机构和1组辅助平行四边形机构,而单平行四边形码垛机器人只有1组辅助平行四边形机构[5-6]。
对这两种码垛机器人进行机构方面的对比研究对指导开发关节码垛机器人具有重要意义,目前国内外学者对双平行四边形码垛机器人的机构研究得较多,对单平行四边形码垛机器人的机构研究得较少。本文拟就运动学与静力学两方面对这两种构型码垛机器人进行对比分析,以便为码垛机器人的构型选择提供参考。
1 两种构型码垛机器人运动学对比分析
1.1 单平行四边形码垛机器人运动学建模与逆解
单平行四边形码垛机器人的机构简图如图1所示,由1个串联机构和1组(2个)辅助平行四边形机构组成,具有4个自由度。辅助平行四边形机构能够使末端执行器始终保持水平姿态,使原本5个自由度的串联机构减少1个自由度。因此,可以按照串联机构的方式建立单平行四边形码垛机器人的D-H连杆坐标系。

图1 单平行四边形码垛机器人机构简图
克雷格将坐标系{i}固连于连杆i的首端关节副,其原点位于关节轴i上,坐标系的编号与关节轴的编号保持一致[7]46-49。按该方法建立的单平行四边形码垛机器人的D-H连杆坐标系如图2所示。

图2 单平行四边形码垛机器人D-H连杆坐标系

(1)
式中:cθi=cosθi;sθi=sinθi;αi-1为绕Xi-1轴,从Zi-1旋转到Zi的角度;ai-1为沿Xi-1轴,从Zi-1移动到Zi的距离;θi为绕Zi轴,从Xi-1旋转到Xi的角度;di为沿Zi轴,从Xi-1移动到Xi的距离。αi-1,ai-1,θi,di(i=1,2,3,…)都是D-H连杆坐标系参数。

(2)
式中:s1=sinθ1;c1=cosθ1;s23=sin(θ2+θ3);c23=cos(θ2+θ3);s1-5=sin(θ1-θ5);c1-5=cos(θ1-θ5),其他类同;[nxnynz]T构成X6轴的单位矢量;[oxoyoz]T构成Y6轴的单位矢量;[axayaz]T构成Z6轴的单位矢量;(px,py,pz)为坐标系{6}原点在坐标系{0}中的坐标。
由式(2)中px,py对应的表达式可得:
θ1=Atan2(py,px)
(3)
由式(2)中nx,ny对应的表达式可得:
θ5=θ1-Atan2(ny,nx)
(4)

(5)

θ3=Atan2(s3,c3)
(6)
由式(2)中pz对应的表达式整理可得:
(a3s3)c2+(a3c3+a2)s2=l2
(7)
解超越方程[7]82-83得
(8)

上述步骤解算出来的θi是D-H连杆坐标系中定义的关节角,可由图1所示机构简图中各个轴的物理轴角Ai叠加上关节角的初始值得到。因此,各个轴的物理轴角Ai可由式(9)算得:
(9)
1.2 双平行四边形码垛机器人运动学逆解
双平行四边形码垛机器人的机构简图如图3所示,由含1个主平行四边形的主体机构和1组(2个)辅助平行四边形机构组成,同样具有4个自由度。与单平行四边形码垛机器人不同的是,其主体机构是1个串并联混合机构。在运动学上,仍然可以按照串联机构的方式来处理,不过需要考虑主平行四边形的约束关系。因此,双平行四边形码垛机器人运动学逆解中解算关节角θi的步骤与单平行四边形码垛机器人相同。下面仅就主平行四边形的约束关系对各个轴的物理轴角Ai的影响作具体阐述。

图3 双平行四边形码垛机器人机构简图
由图3可知,第1、2、5轴的物理轴角与单平行四边形码垛机器人相同,而第2、3轴的物理轴角的轴线重合。由于主平行四边形的约束,第3轴的物理轴角为:
(10)

(11)
2 两种构型码垛机器人静力学对比分析
2.1 单平行四边形码垛机器人静力学分析

与机器人第3轴静力矩有关杆件3、4、5、8的受力情况如图4所示。分别对杆件8、杆件4和杆件5构成的整体、杆件3作受力分析,并根据力平衡和力矩平衡条件列出表达式,然后联立这些表达式,可得:

图4 单平行四边形码垛机器人第3轴静力矩分析
T3=G3lC3c23+FD2l3c23
(12)
式中:ci=cosAi;cij=cos(Ai+Aj),以下类同。
与机器人第2轴静力矩有关杆件2、6、7的受力情况如图5所示。分别对杆件6、杆件7、杆件2作受力分析,并根据力平衡和力矩平衡条件列出表达式,然后联立这些表达式,可得:
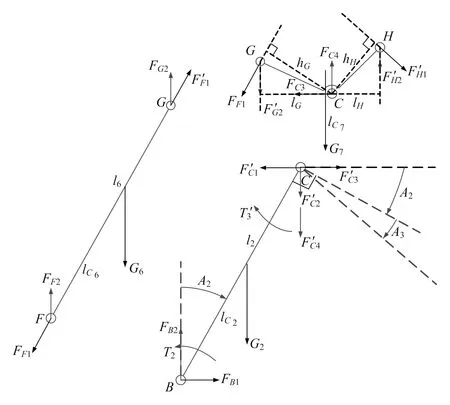
图5 单平行四边形码垛机器人第2轴静力矩分析
(13)
2.2 双平行四边形码垛机器人静力学分析
与机器人第3轴静力矩有关杆件3、4、5、8、9、10的受力情况如图6所示。分别对杆件8、杆件4和杆件5构成的整体、杆件3、杆件10、杆件9作受力分析,并根据力平衡和力矩平衡条件列出表达式,然后联立这些表达式,可得:

图6 双平行四边形码垛机器人第3轴静力矩分析
(14)

与机器人第2轴静力矩有关杆件2、6、7的受力情况如图7所示。分别对杆件6、杆件7、杆件2作受力分析,并根据力平衡和力矩平衡条件列出表达式,然后联立这些表达式,可得:

图7 双平行四边形码垛机器人第2轴静力矩分析
(15)
3 实例计算与仿真验证
3.1 双平行四边形码垛机器人运动学逆解实例与仿真
由1.2节可知,双平行四边形码垛机器人的运动学逆解过程实际上包含了单平行四边形码垛机器人的逆解过程。现以ABB IRB460为例对双平行四边形码垛机器人进行运动学逆解计算,从机器人结构模型中提取D-H参数值如下:a1=260 mm,a2=945 mm,a3=1 025 mm,a4=220 mm,d1=724.5 mm,d6=251.5 mm。在笛卡尔空间对TCP(末端法兰中心点)规划一条由多段线组成的“门型”轨迹,其控制点坐标如下:P0(1 505,0,1 436),P1(1 150,-776,270),P2(1 150,-776,793),P3(1 722,590,793),P4(1 722,590,270),且保持末端法兰姿态不变。由逆解计算得到各关节角轨迹,再将各关节角转换为相应的物理轴角。
逆解计算与仿真验证思路框图如图8所示。在仿真环境中,对TCP施加与上述相同的轨迹,进行仿真,然后测试得到的相应物理轴角轨迹。逆解计算和仿真两种方法得到的物理轴角轨迹几乎完全重合(如图9所示),证明前述运动学逆解算法是正确的。

图8 逆解计算与仿真验证思路框图

图9 逆解计算与仿真得到的物理轴角轨迹对比
3.2 双平行四边形码垛机器人静力学实例与仿真


图10 ABB IRB460典型位姿下的物理模型
将物理模型的相关物理参数及工况数据代入式(14)和(15),得出第2、3轴的静力矩:T2=1.580 5E+06 N·mm,T3=1.335 9E+06 N·mm。
将上述机器人物理模型转成力学仿真模型,进行静平衡计算,测试第2、3轴的驱动力矩,结果如下:T2=1.594 1E+06 N·mm,T3=1.361 0E+06 N·mm。仿真计算结果与理论计算结果非常接近,证明前述理论推导是正确的。
3.3 单平行四边形码垛机器人静力学实例与仿真
为了方便对比,单平行四边形码垛机器人静力学实例计算和仿真验证仍然采用ABB IRB460的模型,只是删除了第3轴的曲柄和连杆。机器人物理模型分析工况如下:负载为110 kg,A2=30°,A3=15°。
将物理模型的相关物理参数及工况数据代入2.1节中的算式(12)和(13),得出第2、3轴的静力矩:T2=2.959 6E+06 N·mm,T3=1.426 9E+06 N·mm。
将上述机器人物理模型转成力学仿真模型,运行静平衡计算,测试第2、3轴的驱动力矩,结果如下:T2=2.996 6E+06 N·mm,T3=1.450 2E+06 N·mm。仿真计算结果与理论计算结果非常接近,证明前述理论推导是正确的。
4 结束语
本文通过实例计算和仿真验证对单平行四边形和双平行四边形两种构型码垛机器人做了运动学与静力学对比分析,结果表明:单平行四边形和双平行四边形两种码垛机器人的运动学算法是一致的,只是轴角的表达形式不同;在典型位姿下,双平行四边形码垛机器人第2轴的静平衡力矩显著小于单平行四边形码垛机器人,但第3轴的静平衡力矩相差不大。此结论可为开发关节码垛机器人选择构型提供重要的参考依据。
