基于比例伪时序算法的舰船电力风险评估系统
2022-03-19詹锦皓李维波李齐邹振杰孙万峰
詹锦皓,李维波,李齐,邹振杰,孙万峰
武汉理工大学 自动化学院,湖北 武汉 430070
0 引 言
随着未来舰船设备的更新换代,越来越多的新研设备及高精度装置将列装上舰,这些设备的高能耗需求对舰船电力系统的稳定性提出了新的挑战。面对日趋复杂的舰船电力系统,一旦发生故障,如果舰员仅凭传统的报警信息进行操作决策,可能会因处理不及时而造成更为严重的后果,因此传统的报警系统将难以适应未来大型舰船电力系统安全稳定的保障需求。
国际上在舰船电力系统风险评估方面的研究起步较晚,于上世纪70年代才首次提出此概念[1]。到80年代,我国也开始重视舰船可靠性方面的研究工作。与舰船电力系统相比,陆地电力系统评估体系的发展时间更早,也更为成熟,因此,目前舰船电力系统的风险评估研究,更多的是对陆地电力系统可靠性研究成果的继承与发展。然而,舰船电力系统不同于陆地电力系统,其整体结构更为紧凑,且海面环境复杂多变,如果直接沿用陆地电力系统的评估指标,难以满足舰船电力系统的实时评估要求[2-3]。
为了对舰船电力系统进行实时监控和风险评估,本文拟引入伪时序算法并进行改进,由此提出基于比例伪时序算法的风险评估系统。首先,通过模拟装置仿真采集舰船电力系统的电压、功率和频率信息,并通过组态界面可视化各电力物理量,进而传输到模拟装置中;然后,基于模拟装置对物理量进行算法运算,进而对整体电力系统进行风险评估;最后,通过模拟不同的运行工况,验证该评估系统的可靠性和实时监控稳定性。根据舰船电力系统的实时风险评估结果和实船经验,舰员即可作出决策判断,从而对当前电力状况提出改进措施。
1 改进伪时序算法
传统的伪时序算法是通过在采集数据库中选取对评估指标重要的各状态变化部分,然后有针对性地对其进行抽样,因而减少了计算时间。与传统电力系统评估中常用的蒙特卡罗法相比,伪时序算法在状态抽样上效率更高,可以在同样的时间内完成更多、更复杂的运算。伪时序算法可以根据电力系统状态变化的时序特点,筛选出某一状态变化过程的状态量,并将所需状态量建立集合,以综合反映系统运行时间内的变化情况。
传统的伪时序算法虽然可以通过系统的时序特性来生成状态序列,但其时序信息过于简单。为此,本文将根据舰船电力系统中各状态的重要度,对各状态量进行排序筛选,排除对系统整体影响较小的状态量,从而提高算法效率。各状态重要度的评价标准为该状态量对整个系统的影响程度,例如,假设从系统状态集合中去除某状态,通过判断电力系统的状态是否发生变化即可完成重要度划分。图1所示为改进的伪时序算法系统状态图,本文假设了9个状态量S1~S9,其中S1~S6为可接受状态量,S7和S8为风险状态量,S9为低重要度状态量[4]。
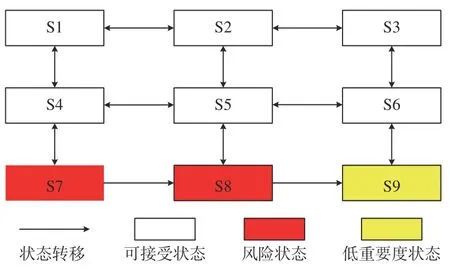
图1 伪时序算法的系统状态图Fig.1 System state diagram of pseudo time-series algorithm
根据传统的伪时序算法流程对S1~S9进行随机采样,当采取到风险状态时,流程将转换到下一个步骤,否则,继续采样,其中S9为低重要度的系统风险状态量。以S7(风险状态)为例,如果接下来的采样结果为S4,即状态转移过程为S7-S4,系统将变为正常状态,否则,重新进行随机采样;如果接下来的采样结果为S8(风险状态),则需继续对S8-S5和S8-S9进行采样。按照伪时序算法,当采集到S9(风险状态)时,需对S9继续进行采样,而S9接下来的状态路径只有S6(正常状态),则此次状态转移过程的故障序列为S7-S8-S9-S6。
通过对伪时序算法进行改进(图1),S9将被判定为重要度较低的状态量,虽然其存在风险,但依然可以被认定为安全状态。经过改进伪时序算法的处理,S7-S8-S9-S6的故障序列可以简化为S7-S8-S9。当 S8-S9的状态转移结束之后,即可判定系统回归正常,从而减少了从S9向后继续进行状态转移的步骤。
改进伪时序算法与传统伪时序算法的对比分析结果如表1所示。
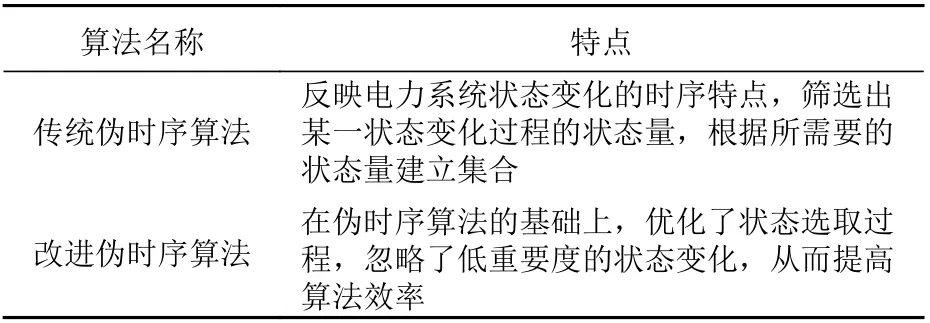
表1 伪时序算法的对比分析Table 1 Comparative analysis of pseudo time-series algorithms
改进的伪时序算法通过将处于判断依据临界的状态量筛选出来,省去了对风险指标无用的正常状态以及低重要度状态的检验过程,简化了算法,丰富了状态集合,并提高了算法精度与计算效率[5]。改进伪时序算法的流程如图2所示,包括获取设备状态原始数据流程(图2(a))和判断风险状态流程(图2(b))。

图2 改进伪时序算法的流程Fig.2 Flow chart of improved pseudo time-series algorithm
由图2可知,首先采用标准化放大系统的重要度,随后采集系统各状态的重要度,并将重要度较低的风险状态视为安全状态予以处理,最后,即可获取各设备状态的原始数据;当原始数据获取完毕之后,即可对设备进行状态抽样,需要判断抽样状态是否为可接受状态,如果是,则继续对设备进行抽样;反之,判定该状态为风险状态。
2 舰船电力系统的风险评估指标体系
2.1 风险评估指标
所谓风险,即描述某一事故发生的可能性或事故恶性影响的程度。本文定义的风险评估是指在客观认识系统存在风险因素的基础上,判断事故发生的可能性及产生损害的程度,从而制定合理的风险应对措施。舰船电力系统风险在线实时评估的定义为:舰船在某一运行工况下,由于某种风险因素可能引起某种事故的发生,需评估事故发生的概率和事故产生的影响程度[6-7]。

与舰船电力系统风险Risk相关的要素为式中:L为风险等级;K为风险类型;P为风险发生的概率;S为风险的严重程度。舰船电力系统中存在着影响设备状态的大量因素,但在表现形式上都可以体现为参数的变化,因此,本文将根据舰船电力系统的实际特点,选取电压风险、概率风险和频率风险作为风险评估指标,从而建立舰船电力系统的风险评估指标体系[8]。
2.1.1 电压风险指标
电力系统的电压越限风险,是指因系统电压过高或过低而超过极限值所引起的危害。电压过高,可能会导致电力设备击穿,使电机温度升高,从而损害电力系统;电压过低,可能会导致电网振荡,从而降低有功负荷能力。对于系统中的第k个设备,其电压越限严重度指标Skv为

式中:Δvk为第k个设备的实际电压与额定电压之间的差值;k=1, 2, ···,N,为系统设备序号,其中N为序号最大值;Vk为第k个设备的额定电压。
因此,电压风险指标Rv为

式中,Pkv为系统中第k个设备发生电压越限故障的概率。
2.1.2 功率风险指标
电力系统的功率越限,是指因过载大电流而导致机组发热和系统压力过大,有可能烧坏各路设备或线路而存在安全风险。系统中第k个设备的过载严重度指标Skp为
式中,PkI和Pek分别为第k个设备发生过载故障时的实际功率和额定功率。
功率风险指标RP为

式中,Pkr为系统中第k个设备发生过载故障的概率。
2.1.3 频率风险指标
电力系统的频率偏移风险一般是由于发电机组发生频率波动而无法稳定工作所致。频率偏移将降低电网的供电质量,进而影响负载工作,例如舰船水面航行的质量。系统中第k个设备的频率偏移严重度指标Skf为

式中,fkp和fk分别为系统中第k个设备的实际频率和额定频率。
2.1.4 风险指标优化
舰船电力系统的各个设备存在一定的优先级关系,不同设备的状态变化对整个系统的影响不同,同一种风险类型对不同设备造成的影响也不尽相同。评价某一风险的参考指标包括设备运行的稳定性、设备灵敏度、设备损害的危害度等多种因素,因此,本文拟将以上各种因素整合为重要度予以考虑。通过在算法流程中引入重要度,可以进一步优化各风险指标的计算结果。
电压越限严重度指标优化之后的表达式Skv1为

式中,rk为系统中第k个设备的重要度。根据GJB 13A-1997《舰船电气规范》,环网电机的重要度最高,负载次之,配电板最低。
功率过载严重度指标优化之后的表达式Skp1为

对频率偏移严重度指标进行优化后的表达式Skf1为

2.2 风险定级
陆地电网在风险等级研究方面已有多年的发展历程,具有一定的参考价值。根据舰船电力系统的运行保障要求和风险指标,并参考陆地电网的等级划分标准,本文将舰船电力系统的风险等级划分1级风险、2级风险和3级风险3个等级[9],如图3所示。
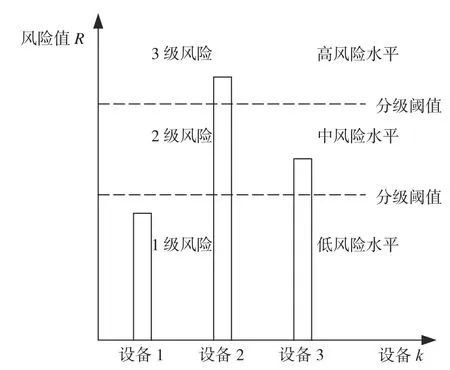
图3 风险示意图Fig.3 Risk diagram
为了增加区分度,本文采用极端情况下的风险指标作为分级阈值,其参考标准为:1)1级与2级:系统在安全范围内正常运行,仅个别或少量设备参数波动异常,属于中风险水平;2)2级与3级:电力系统中出现明显的故障点或严重威胁舰船安全的风险问题,属于高风险水平,且根据严重程度可能发出故障告警。
由此可见,在确定1级、2级风险分级阈值时,必须令2级风险涵盖不超过故障界限的所有高风险情况,具体方法为:选取系统中重要度最低且故障概率最高的一个设备,将该设备的各参数设置为故障临界值,其他重要设备(例如电机、负载等)均为额定状态,从而计算出此时系统的各项风险指标,并将其定义为1级、2级的分级阈值。确定2级、3级风险分级阈值时,必须令3级风险涵盖超过最低故障界限的高风险情况,具体方法为:选取系统中重要度最高且故障概率最低的一个设备,将该设备的各参数设置为故障临界值,其他重要设备均为额定状态,从而计算出此时系统的各项风险指标,并将其定义为2级、3级的分级阈值[10-12]。
3 比例伪时序算法的风险评估流程及测试平台
3.1 舰船电力系统的拓扑结构
本文研究的舰船电力系统采用的是环形网络(图4),该拓扑结构能提供更多的连通路径,可以根据实际情况选择最优路径,具备较高的稳定性和灵活性。与传统的电力系统结构相比,环形网络中处于可工作状态的多台电机可以为电网提供更大容量和更高质量的电能,从而显著提高电力系统的冗余度和抗干扰能力,因此该结构更符合当前舰船系统的发展趋势与应用需求。
图4中,DG为电机,L为负载,PDB为配电板,各设备参数设置参考了GJB 13A-1997《舰船电气规范》,且故障临界值均按照10%的额定值予以考虑。
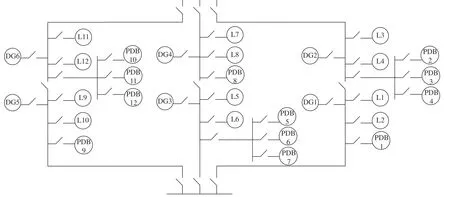
图4 舰船电力系统拓扑模拟Fig.4 Simulation of ship power system topology
3.2 风险评估流程
与传统的电力系统预警体系相比,本文的舰船电力系统风险评估体系不是直接把各个设备的状态参数与对应的阈值进行比较后作出判断,而是把当前状态下每一类参数的风险状况进行状态获取和指标计算,然后再与各级风险分级阈值进行比较后完成评估,具体的流程如图5所示。图中,状态获取阶段为风险评估采集数据信息的过程,基于改进的伪时序算法,在实时监测的数据中判断并提各状态量,然后将其放入指标计算序列[13];指标计算阶段指通过各设备的故障概率和严重度以及电气参数来计算风险值的过程,单纯的风险指标计算结果无法直观地表示风险影响的程度,因此需要进行必要的分级预警;分级预警阶段是通过对比各风险等级的分级阈值与风险指标计算值,从而确定系统状态所处的风险水平并进行风险预警[14]。
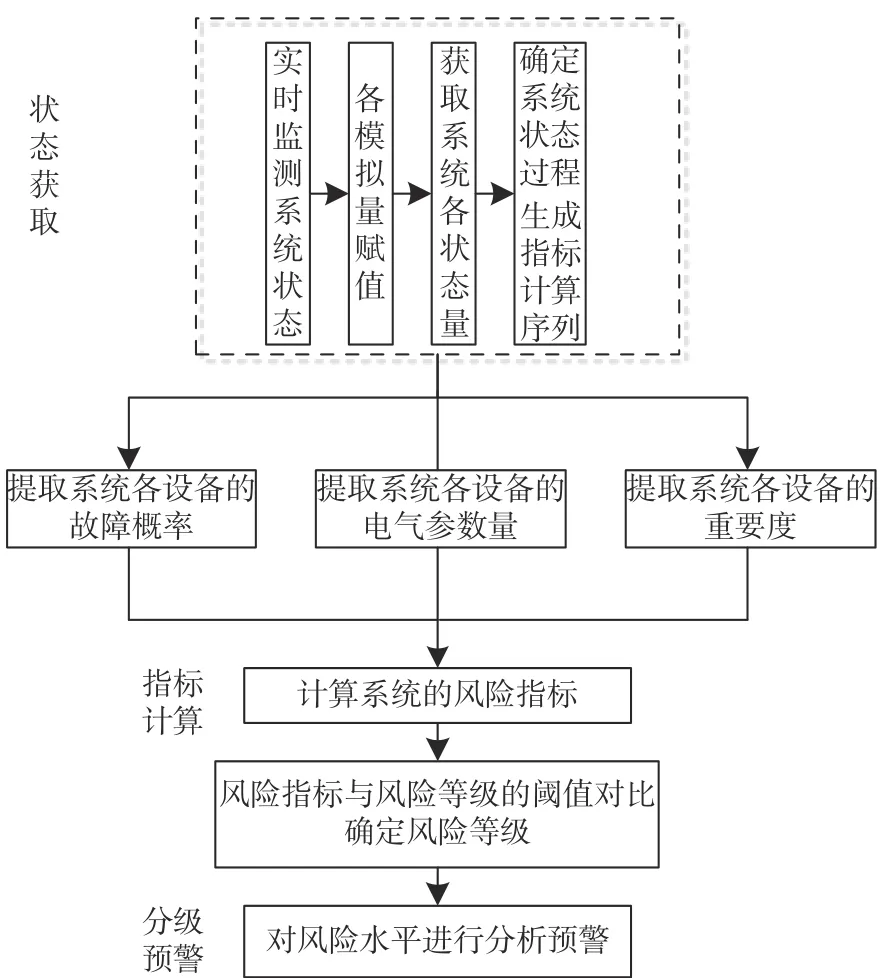
图5 风险评估流程图Fig.5 Risk assessment process
由图5可知:首先,在状态获取阶段实时监控系统状态的同时,对各电力模拟量进行赋值并获取系统状态量,从而确定系统状态过程并生成指标计算序列;然后,提取系统各设备的故障概率、电气参数和重要度,在指标计算阶段计算当前状态下的系统风险指标,并与各级风险等级的分级阈值进行比较,从而判断风险等级;最后,在分级预警阶段对系统风险等级进行分析和预警。
3.3 比例补偿优化
在图4所示的电力系统拓扑结构中有6台电机可为电网供电,但在实船航行过程中,这6台电机不会一直处于并网工作状态。根据不同的航行工况,并网电机的数量会有所不同,电力系统的电压、功率及频率的风险指标也会相应发生变化,由于上文所采用的风险评估流程没有考虑这一点,故需开展进一步的优化。
舰船电力风险评估系统必须达到实时监控评估的效果,即工况发生变化、系统拓扑结构改变时,评估系统依然可以根据当前的工况进行实时反馈并分级预警,所以在评估流程中必须加入实时判断当前系统工况的环节,以满足实际使用需求。
由于计算方法不变,即6台电机并入电网时的分级阈值计算方式与2台或3台电机并入电网时的相同,且各负载的重要度远低于电机,所以负载变化对整个系统运行的影响较小。因此为简化流程,本文的工况变化将仅考虑电机并入数量所导致的系统拓扑结构变化。
以6台电机并入电网时的各风险量分级阈值作为标准值1,其他工况下的采用比例补偿系数。根据代入评估算法中的实船试验数据,即可确定各工况下的电压、功率和频率分级阈值的比例补偿系数,如表2所示。
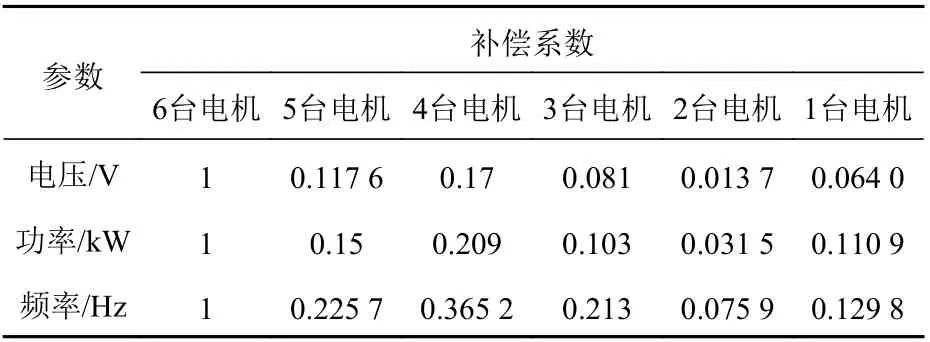
表2 比例补偿系数Table 2 Proportional compensation coefficient
引入比例补偿系数后的电压越限严重度指标Skv2为

式中,Kv为电压分级阈值的比例补偿系数。
引入比例补偿系数后的功率过载严重度指标Skp2为
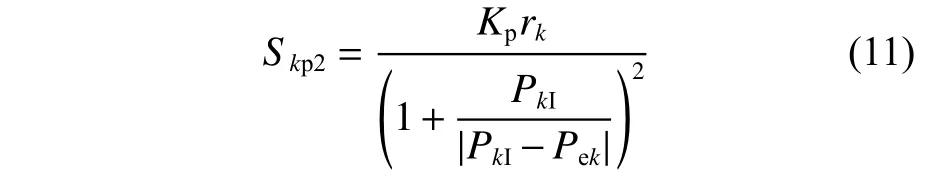
式中,Kp为功率分级阈值的比例补偿系数。
引入比例补偿系数后的频率偏移严重度指标Skf2为

式中,Kf为频率分级阈值的比例补偿系数。
经过比例补偿优化后的风险评估流程如图6所示,包括匹配比例系数与状态获取流程(图6(a)),以及风险指标计算与预警流程(图6(b))。首先,对各模拟量进行赋值,判断当前系统的运行工况;然后,分别为电压风险指标、功率风险指标、频率风险指标匹配不同的比例补偿系数;最后,获取系统各状态量进行风险指标计算。由此可见,优化后的风险指标计算流程不仅可以评估当前系统的风险状态,还可以根据系统运行状态来优化自身算法,从而选取适合当前工况的算法来计算风险指标,进而进行风险评估。
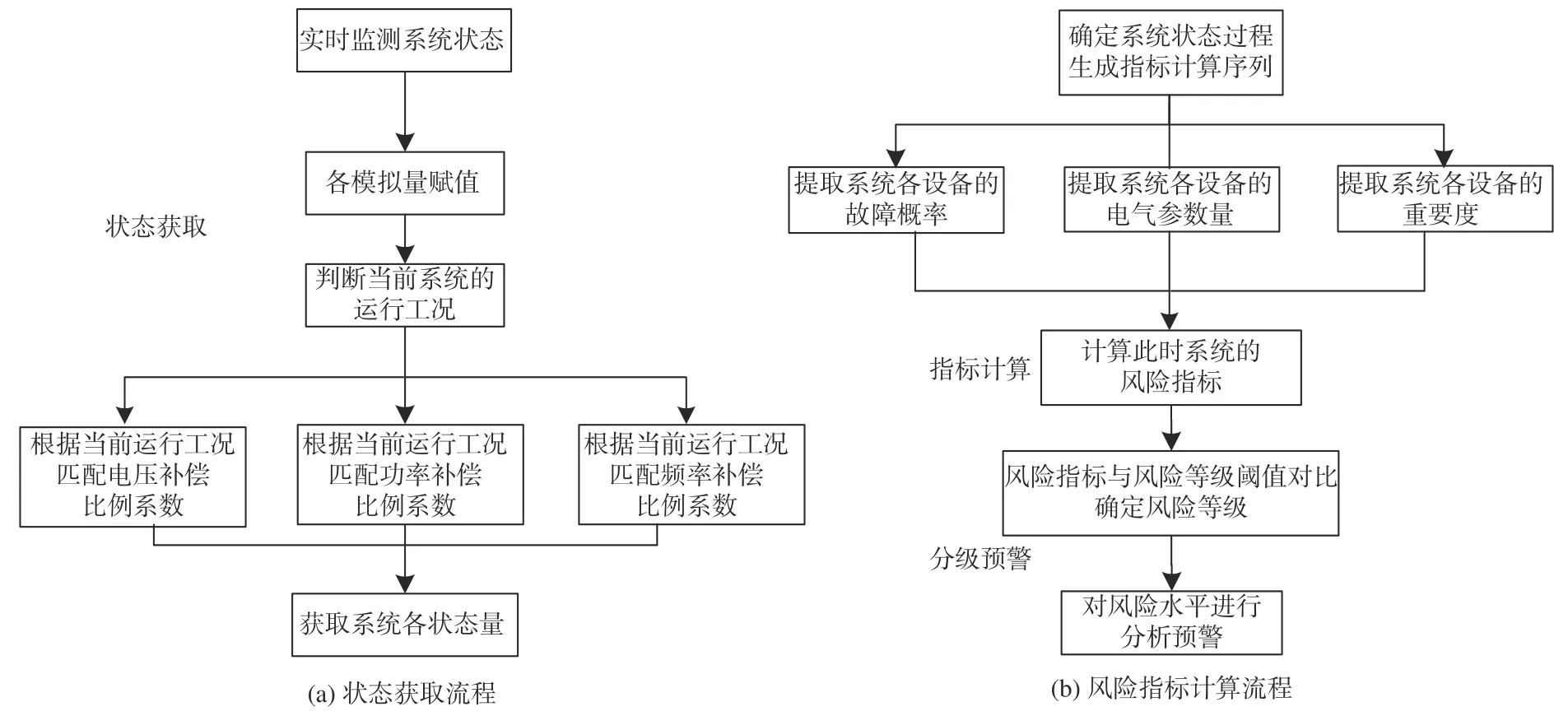
图6 优化后的风险评估流程Fig.6 Optimized risk assessment process
3.4 组态测试平台
本文的在线风险评估系统硬件平台由3大部分组成:参数仿真软件控制器(电脑PC1模拟)、底层控制器和风险评估软件控制器(电脑PC2模拟),如图7所示。首先,采用电脑PC1组态软件模拟舰船电力系统的运行工况,将各设备参数实时发送给底层控制器,并通过界面控制发送系统运行电压、功率和频率等各个参数的状态量;然后,采用ARM芯片控制底层控制器,通过串口接收设备完成数据接收,并将改进时序算法的运算结果上传至风险评估软件控制器;最后,采用电脑PC2模拟风险评估软件控制器,用以接收底层控制器所上传的风险等级和风险指标,并显示在用户界面上。
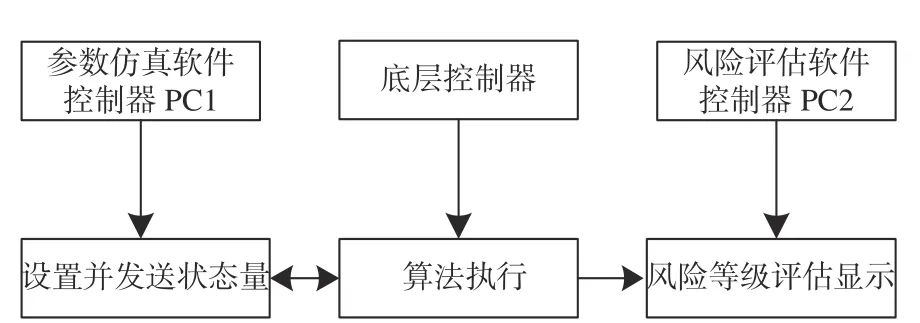
图7 硬件平台结构Fig.7 Hardware platform structure
底层控制器实物如图8所示。
图8 底层控制器Fig.8 Bottom controller object
3.4.1 参数仿真软件界面
在电脑PC1上,由组态软件所构建的参数仿真软件界面如图9所示,其中,①为信息总览部分,通过该部分,可以直观地显示每一个设备的参数,便于后期的实机测试;②为功能按钮部分,可以配合参数设定界面实现参数的下发和复位等功能;③为参数设定部分,通过点击系统结构图中的设备,即可在参数设定界面进行电压、频率和功率等参数的设定。
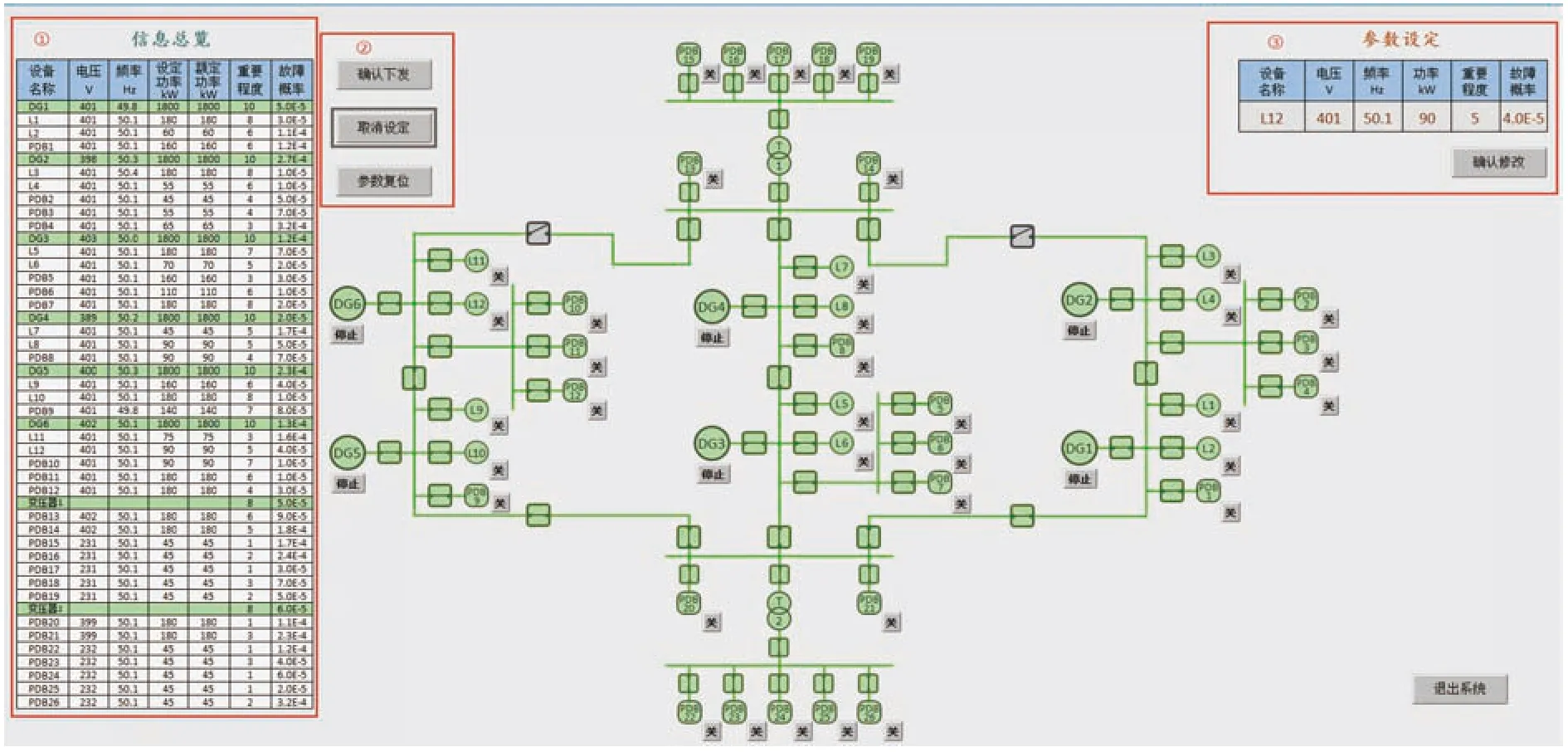
图9 参数仿真界面Fig.9 Parameter simulation interface
3.4.2 风险评估软件界面
在电脑PC2上,由组态软件所构建的风险评估软件如图10所示,其界面主体为舰船电力系统的网络结构图,以便直观了解当前电力系统所接入设备或负载的网络结构特征。其中,①为参数显示部分,通过点击拓扑结构图中的设备,即可显示该设备当前的工作参数;②为风险评估部分,即底层控制器上传的风险等级信息;③为系统健康状态评估部分,其可以根据显示的风险等级改变颜色,从而使报警信息更为直观;④为风险分析部分,即根据当前电力系统的风险等级情况给出的风险分析结论。

图10 风险评估界面Fig.10 Risk assessment interface
4 现场实机测试与结果分析
图11所示为由底层控制器与2台PC电脑组成的现场实机测试装置。
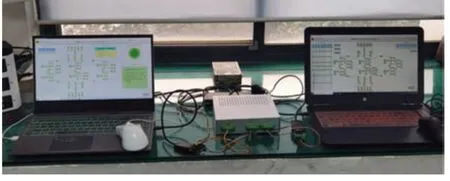
图11 现场实机测试Fig.11 In-site joint test
4.1 故障工况1
以6台机组并入电网为例,设置2台机组发生越限故障,其实机测试结果如图12所示(各指标的定量结果均在算法程序底层完成计算,图12所示为项目成果界面)。此时风险等级显示为“等级3”,系统健康评估状态指示灯为红色,风险分析栏提示了具体的分析结论。
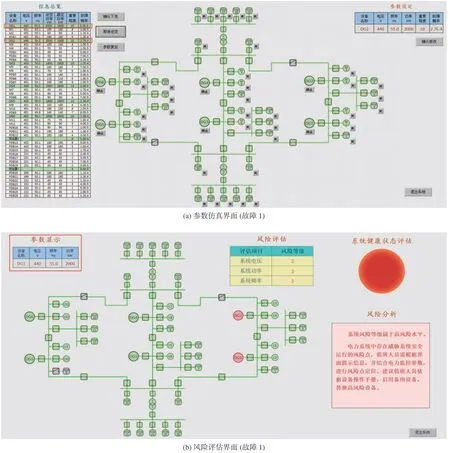
图12 6台机组中2台故障的实机测试结果Fig.12 Joint commissioning test result for two faults of six units
4.2 故障工况2
以6台机组并入电网为例,设置1台机组发生越限故障,其实机测试结果如图13所示。此时,风险等级显示为“等级2”,系统健康评估状态指示灯为红绿交替,风险分析栏提示了具体的分析结论。
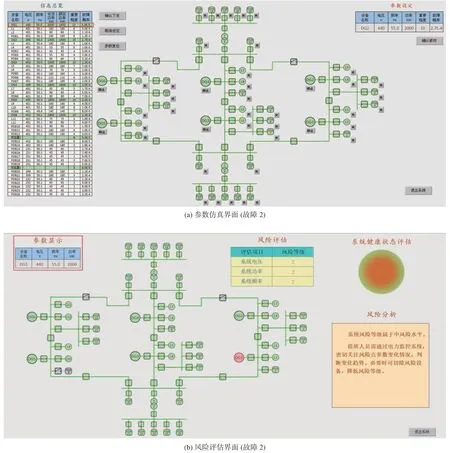
图13 6台机组中1台故障的实机测试结果Fig.13 Joint commissioning test result for one faults of six units
4.3 故障工况3
以6台机组并入电网为例,设置1台机组故障以及部分负载故障,其实机测试结果如图14所示。此时,风险等级显示为“等级3”,系统健康评估状态指示灯为红色,风险分析栏提示了具体的分析结论。
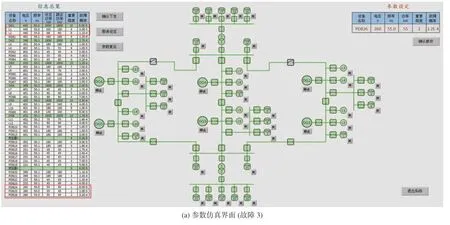
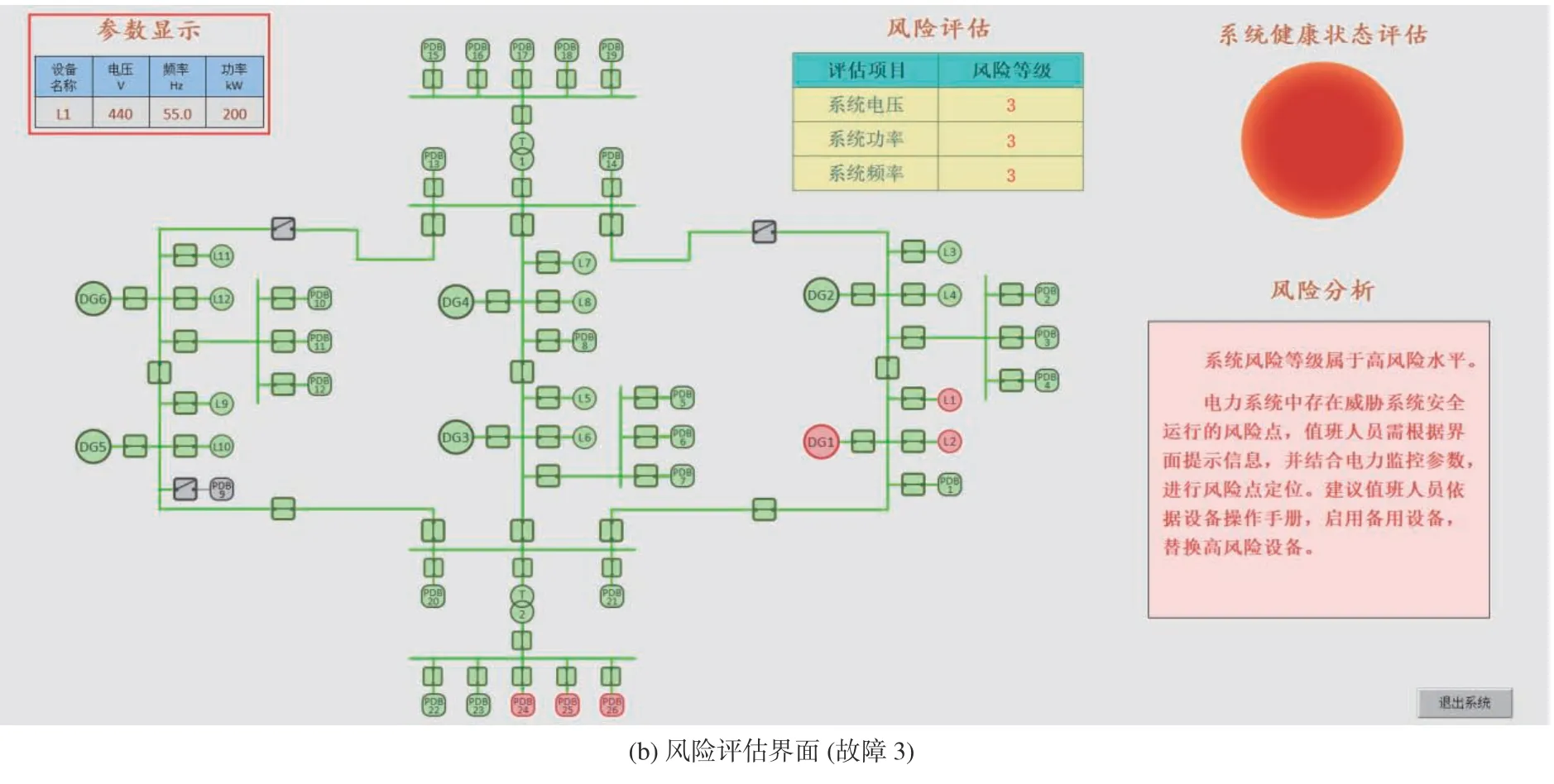
图14 6台机组中1台故障且部分负载故障的实机测试结果Fig.14 Joint commissioning test result for one of six units and partial load fault
由上述实机测试结果可知,本文搭建的风险评估系统可以根据运行工况对整个系统进行实时风险评估。当系统实际运行状态发生变化时,可以通过调整算法来提高风险等级评估的精确度。基于故障设备的重要度和故障概率来综合考量系统的风险情况,有助于舰员在故障之前预先发现高威胁的风险点,从而保障电力系统的安全运行。
5 结 语
本文结合舰船电力系统的运行特点和风险评估问题,建立了基于改进伪时序算法的风险评估指标体系,可以针对电力系统评估标准的电压、功率和频率这3种参数进行在线实时评估,从而直观、准确地可视化系统当前的风险状态和风险水平,以便舰员根据评估结果对当前工况进行监控或维护,有利于提高舰船电力系统的安全性与稳定性。然而,目前该方案仅限于模拟平台运行,所有数据与仿真状态均为试验模拟工况,下一步,将准备开展舰船移动平台测试工作,用以推进后续的实船应用。
