基于超宽带定位的四旋翼目标跟踪技术研究*
2022-03-17葛春晓
葛春晓
(江苏科技大学电子信息学院 镇江 212003)
1 引言
四旋翼无人机具有机动性强,垂直起降和定点悬停等优点,被广泛应用于搜救[1],气象参数收集[2]和物流等领域。利用四旋翼飞行器对地面目标进行跟踪是一项非常有意义的研究。文献[3]利用四旋翼对危险情况下复杂城市建筑群内人员进行搜救。文献[4]利用其对路面车辆进行实时监测,实现智能交通监控。但四旋翼用于室内地面目标跟踪时存在许多问题,主要原因是室外导航环境和室内环境存在偏差导致会导致四旋翼的目标跟踪性能欠佳。
对此,许多学者开始寻求无人机室内地面目标跟踪的有效方法。文献[5]提出了基于Backstepping 技术设计第一制导律的方法。文献[6]提出了基于卡尔曼滤波的FAST 角点检测方法,但卡尔曼滤波器无法准确估计非线性系统中的目标状态。文献[7]提出了一种基于视觉定位技术的方法,但无法应用于黑暗环境下。文献[8]提出一种利用pixhawk 飞控板和视觉结合的目标定位方法,解决位置信息不强导致失效的问题。文献[9]提出基于粒子滤波的室内目标跟踪方法,但计算量大,不适用于实际环境。
鉴于室内环境中,超宽带技术具有大带宽和良好测距能力,可提供高精度定位信息[10~13],以及扩展卡尔曼滤波相较无迹卡尔曼滤波和粒子滤波,具有明显的计算优势[14~16],因此,本文提出了一种基于超宽带定位技术和扩展卡尔曼滤波方法的四旋翼室内地面目标跟踪方案。
2 动力学模型
2.1 四旋翼动力学模型
假设室内环境下的四旋翼具有以下特征:1)无风环境中低速飞行;2)定高飞行;3)仅水平方向运动。使用线运动模型和姿态运动模型描述四旋翼飞行器的动力学模型:

2.2 机动目标模型

其中:σ2m是目标机动加速度的方差;α是机动时间的倒数,或称机动频率,通常采用经验值。低速转弯情况下,α=1/60;机动逃逸情况下,α=1/20;当α=0 时,模型将转换为均匀加速模型。

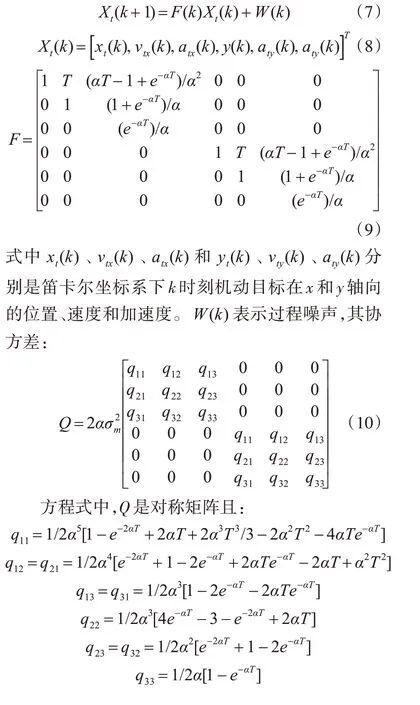
离散化后,机动目标离散状态方程可由以下方程式表示:
3 基于UWB技术的多边定位原理
UWB信号脉宽小于2ns,绝对带宽大于500MHz,相对其他室内定位技术,具有更强的分辨率,抗干扰能力和更低成本。通过获得往返飞行时间(RTOF)来测量目标和基站[12],原理如图1所示。
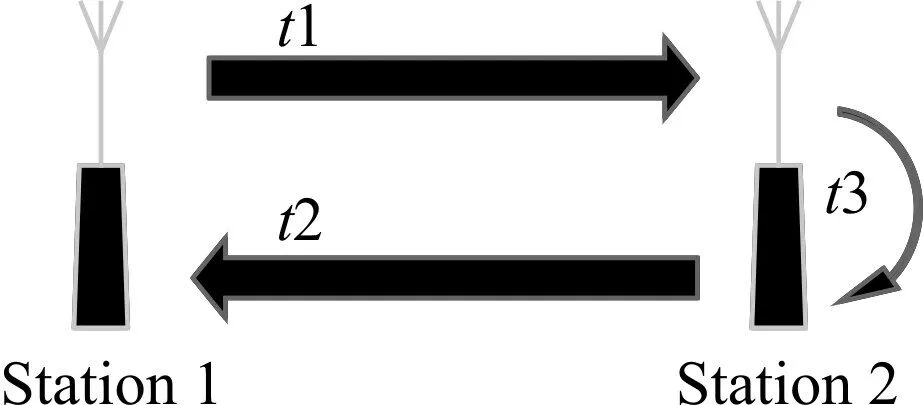
图1 RTOF方法测距原理图
由于研究对象是地面目标,所以目标坐标Z=0,目标运动轨迹可在2 维坐标系下讨论。以此建立笛卡尔坐标系,在(x1,y1)和(x2,y2)的位置建立两个基站,目标(xt,yt)到两个基站的距离di(i=1,2)。
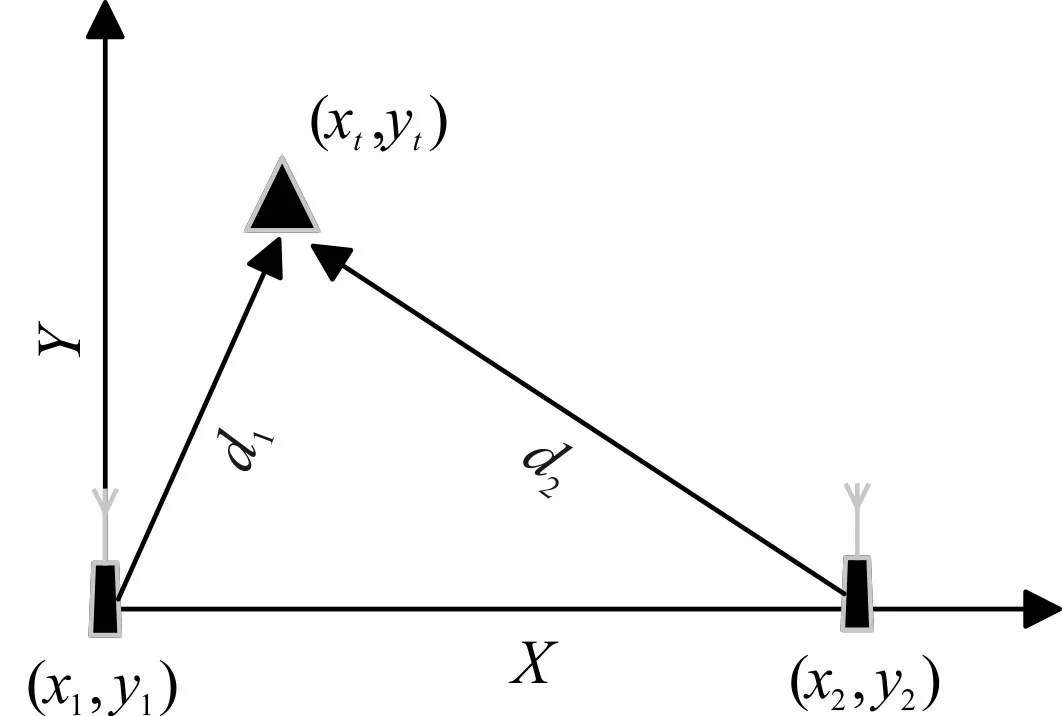
图2 多边定位原理
4 扩展卡尔曼滤波估计地面目标
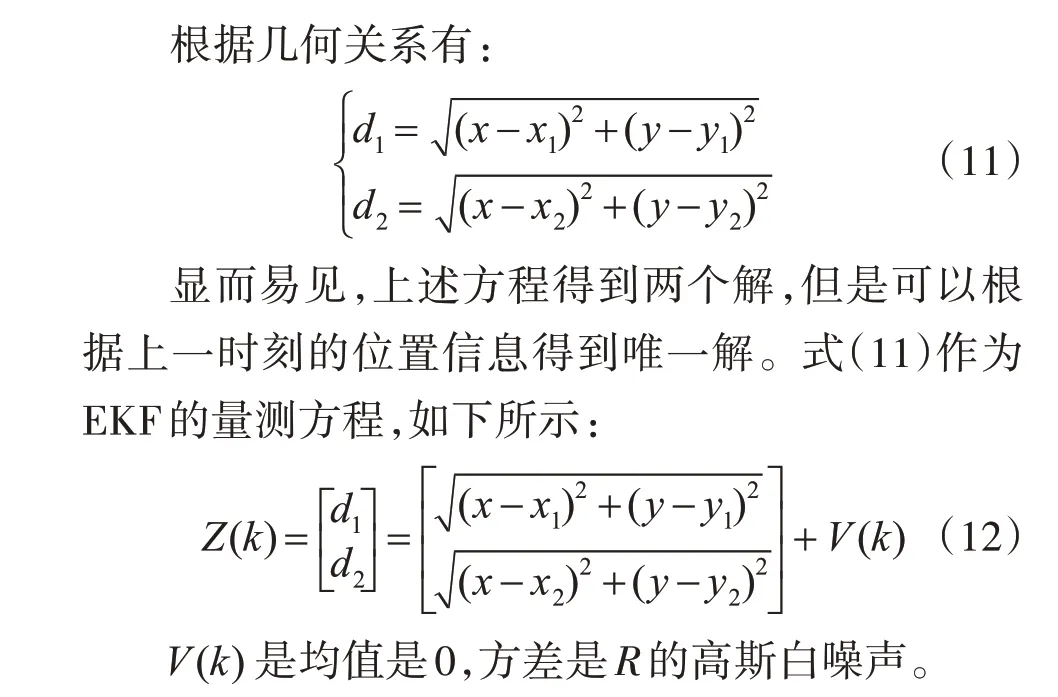
室内复杂的环境噪声往往导致室内定位精度不高。本文采用EKF 算法提高室内定位精度。式(12)作为测量方程表示如下:
式中,V(k) 是观测噪声,其均值是0,方差是R。W(k)是过程噪声,它的均值是零,方差是Q。
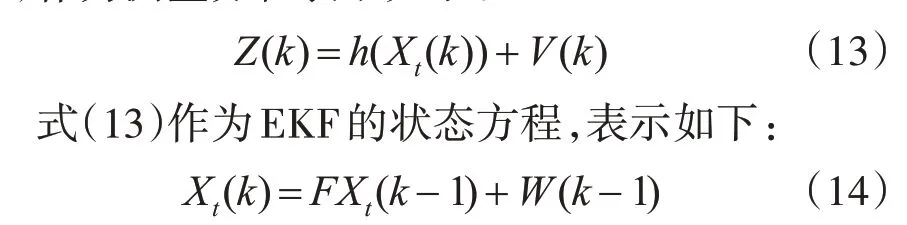
观测方程(13)中,观测信号Z(k)与目标状态Xt(k)的关系是非线性的,利用EKF 处理噪声的步骤如下。
1)初始化初始状态X(0)、Z(0)、协方差矩阵P0;
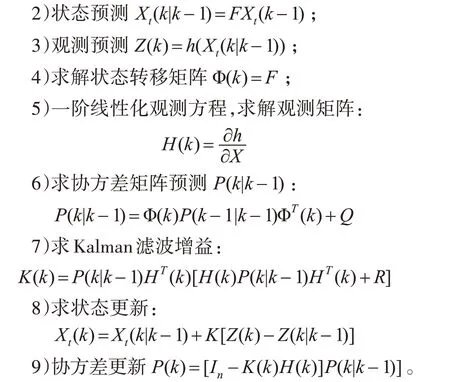
通过重复循环上述过程完成各个时刻EKF 对非线性系统的处理,最后可估计出目标的位置(x̂t,ŷt),并用于四旋翼路径规划。
5 四旋翼无人机路径规划算法
主要基于人工势场法进行路径规划,获得四旋翼所需的期望姿态。进一步利用反步法设计轨迹跟踪控制器,控制四旋翼姿态与所需姿态一致。
5.1 无人机路径规划
室内环境中采用人工势场法规划四旋翼跟踪路径,主要思想是利用引力场来吸引四旋翼。在场引力作用下,四旋翼将被拉到目标位置,建立如下场引力函数Ua(X):

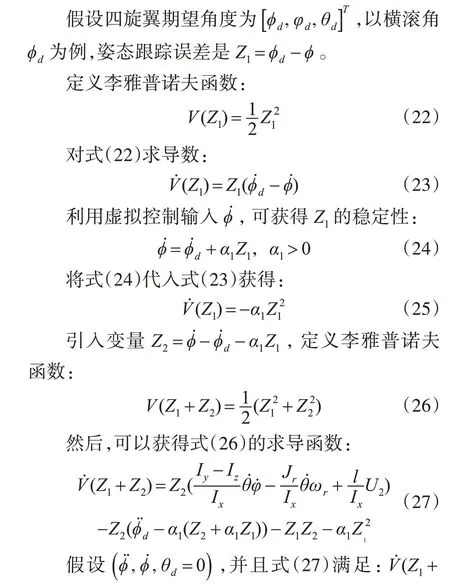
5.2 反步法控制策略
目前已提出了多种四旋翼控制器的设计方法,如线性四旋翼调节器和PID 控制器,但都是线性控制方法,忽略非线性因素和线性化处理四旋翼动力学模型来保持四旋翼姿态。文中基于反步法设计控制器,过程如下。

最后,通过控制输入[U1,U2,U3,U4]T实现四旋翼飞行器的稳定飞行。
6 数值仿真与分析
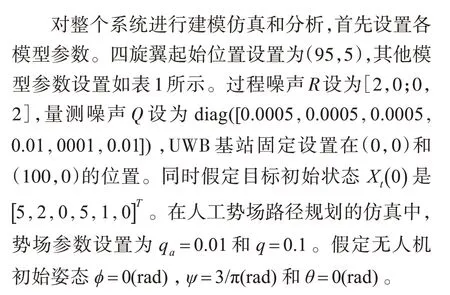
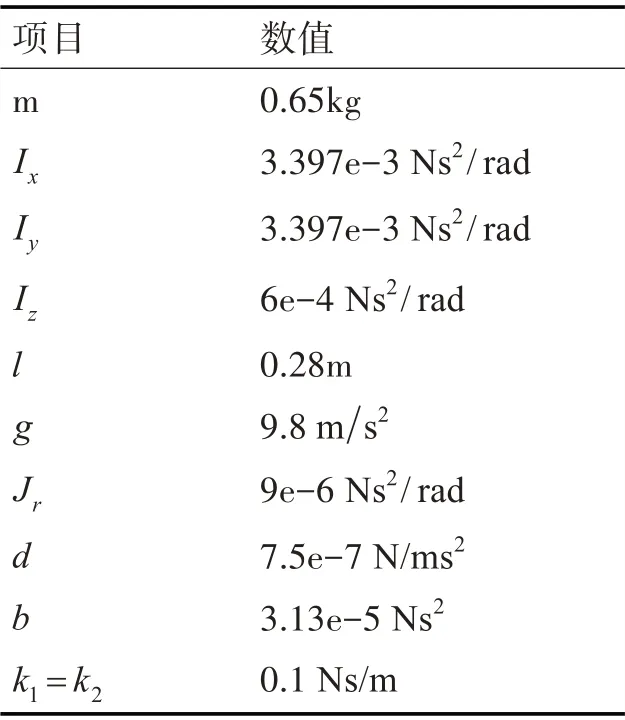
表1 无人机参数设置表
经过仿真,图3 给出了实际测量和估计得到的目标位置轨迹的对比,可以看出EKF算法估计的目标位置降低了测量的误差。图4 是UAV 和目标的实际轨迹曲线的对比图,表明通过基于人工势场的无人机路径规划算法可以估计目标位置从而更准确地跟踪目标。图5 展示了反步法设计的控制器的性能,实际的性能非常接近预期。
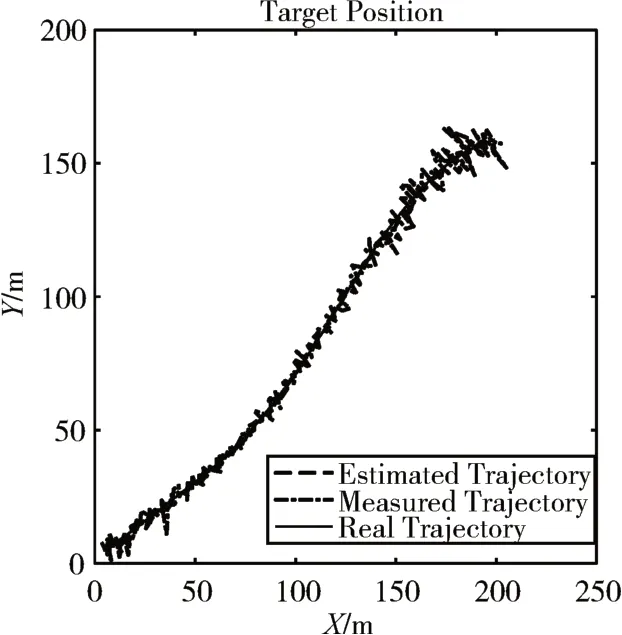
图3 实际轨迹、测量轨迹和估计轨迹比较图
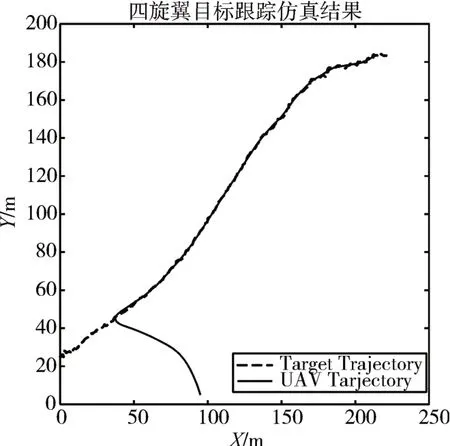
图4 UAV和目标的实际轨迹曲线
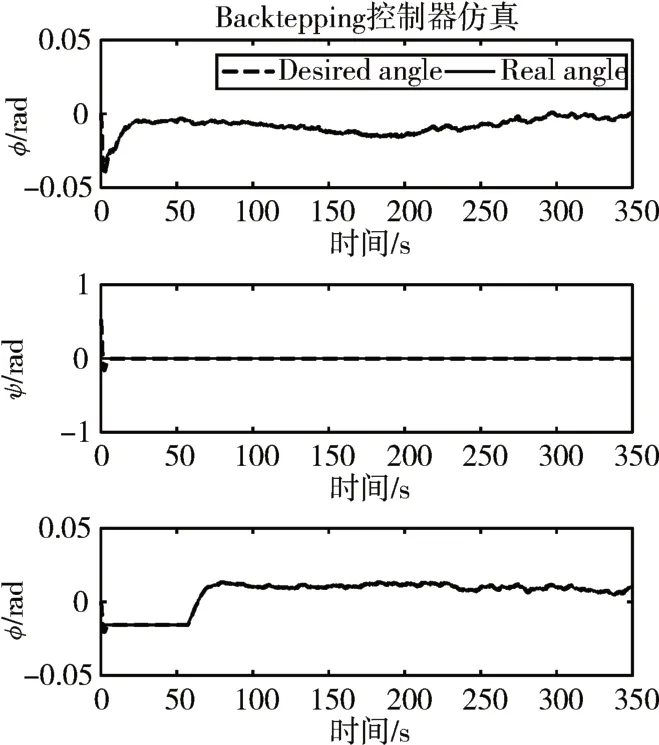
图5 反步法设计控制器的结果
7 结语
本文讨论了室内环境中使用四旋翼跟踪地面目标的问题,采用了UWB 定位技术和EKF 滤波方法提高导航定位精度,并用人工势场法规划四旋翼跟踪路径,利用反步法设计四旋翼的跟踪控制律。为验证所提出控制率的可行性,在Matlab/Simulink中进行了仿真,得到如下结论:1)通过扩展卡尔曼滤波器估计的目标状态可以有效地减小误差;2)基于人工势场的路径规划算法可以使四旋翼飞行器获得良好的跟踪性能;3)基于反步法设计的控制器可以很好地控制方向角。