基于图像分割的无人机遥感影像目标提取技术
2022-03-16胡敏,周波
胡 敏,周 波
(1.宣城职业技术学院,安徽 宣城 242000;2.合肥工业大学,安徽 合肥 230009)
无人机飞行存在复杂、高速、多变等特点,使其遥感图像的成像条件也有特殊性,分辨率比一般遥感图像高,并含有更多的信息和细节,但又容易受到各种因素影响而退化,利用计算机视觉技术对其遥感图像进行分析和提取目标物体的轮廓是一项艰巨的任务[1]。通常的遥感图像处理软件和摄影测量软件都不会对无人机图像处理模块进行定制,这给无人机遥感图像信息提取带来了困难[2]。在此基础上,提出了一种基于深度学习的深度监测方法,检测拍摄到的端到端边缘,该方法虽然能够快速提取边缘信息,但受光照影响,提取结果并不精准;用Canny算子计算出像素的梯度值和方向,不均匀光反射区的梯度值远远大于真实轮廓上的像素值,该算法将噪声标记为边界,将像素标记为零,导致边缘检测失败。为此,提出了基于图像分割的无人机遥感影像目标提取技术。图像分割是计算机视觉领域中的一个重要问题,它是图像处理分析的关键环节,在图像工程中占有重要地位,也是进一步理解图像的基础。
1 基于图像分割的无人机遥感影像目标提取
1.1 图像分割
无人机遥感影像中色彩平面为红、绿、蓝(red,green,blue,RGB)平面,用于图像显示,通常以R、G、B分量作为色彩影像分值,依据该值分割图像[3]。
1.1.1 彩色空间转换
在分割图像时,应先选择彩色空间HIS,设H表示颜色名称,用来区分颜色种类;S表示颜色纯度,用来区分颜色深度;I表示光亮程度,用来区分颜色亮度,HIS彩色空间直观示意图如图1所示。
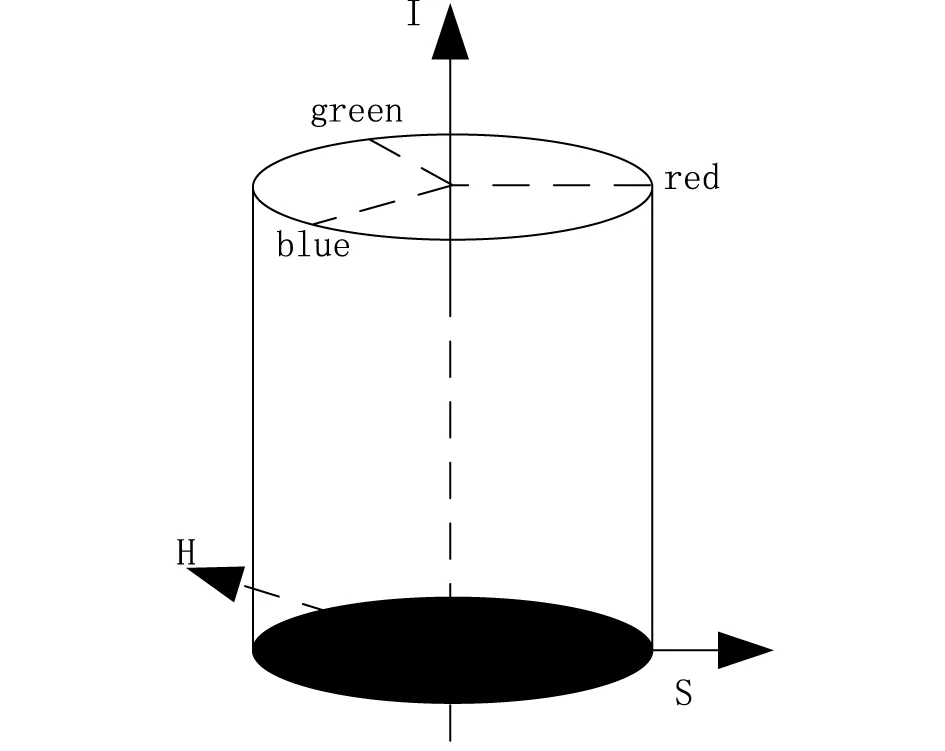
图1 HIS彩色空间
由图1可知,H分量值在0到2π之间;S分量值在0%到100%之间;I分量值用百分比量表示,从黑到白的变化范围为0%到100%之间。HIS彩色空间中圆柱体底上的点均为黑色,I分量值最小,在0~10%范围内;圆柱体顶上的点均为白色,I分量值最大,在90%~100%范围内[4]。
以R、G、B分量为色彩影像分值,将RGB平面转换成HIS彩色空间,转换公式如式(1)所示。
(1)
公式(1)中,R、G、B分量变化范围在[0,255]之间。
1.1.2 图像分割流程
根据彩色空间转换结果,设计图像分割流程,如图2所示。
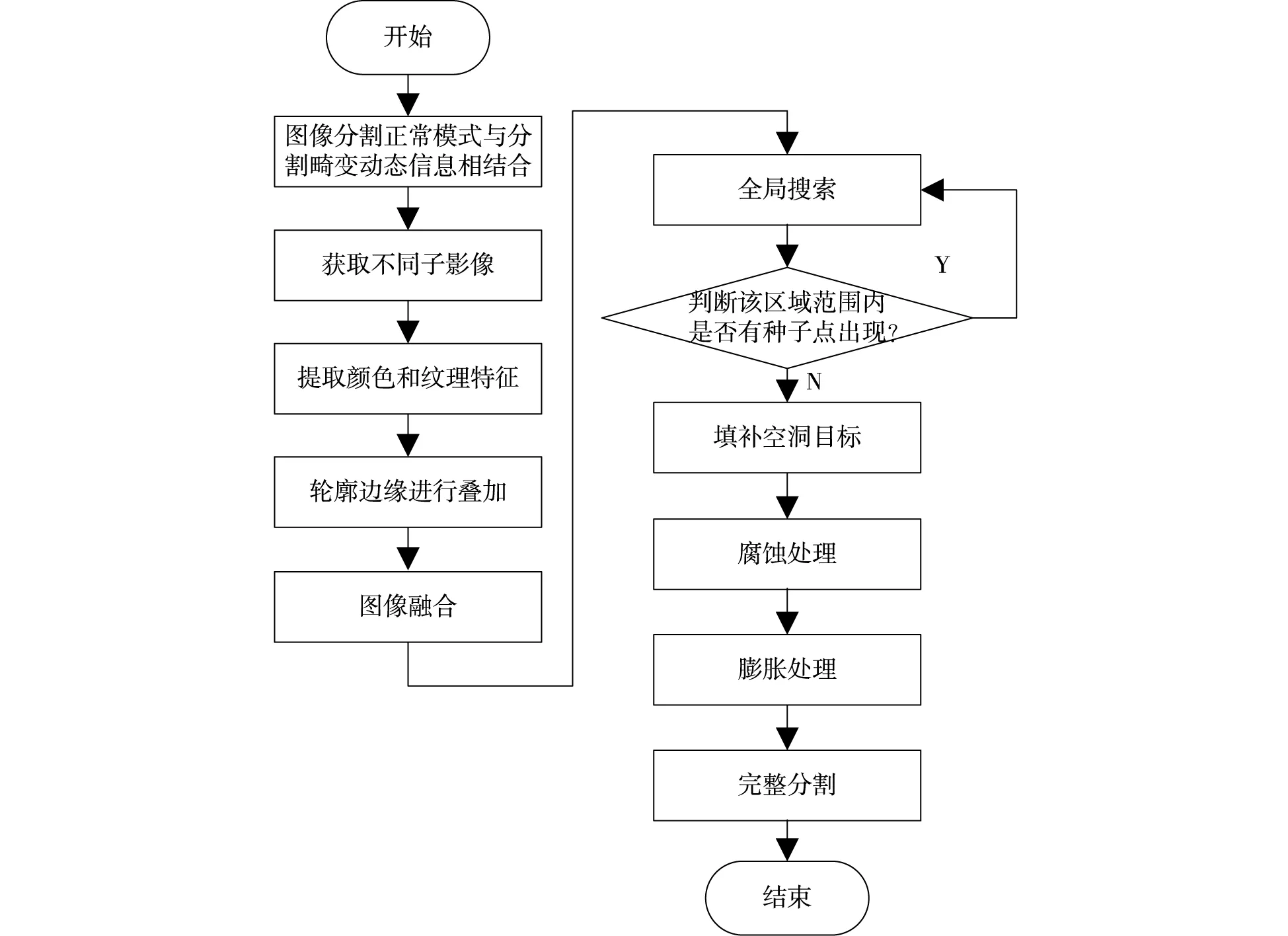
图2 图像分割流程
由图2可知,将图像分割正常模式与分割畸变动态信息相结合,用于分割无人机遥感影像获取的不同子影像[5]。将颜色和纹理特征结合在一起,根据特征融合原理对隐藏层进行处理,由此提取颜色和纹理特征。为了实现对目标分割,结合图像灰度和梯度信息,对图像进行阈值分割[6]。详细分割内容如下所示。
(1)对待分割的图像轮廓边缘进行叠加处理。
(2)采用区域增长法对轮廓边缘叠加处理后的图像进行最大轮廓法融合。
(3)以图像的左上角为出发点,以此作为搜索区域种子点,进行全局搜索,得到首个非零灰度值像素点。全局搜索规则为以搜索到的种子点为起始点,按照从上到下顺序开始搜索,设定搜索补偿阈值后,寻找下一个非零像素点,当找到符合该条件的区域时,判断该区域范围内是否有种子点出现[7]。如果该区域内有种子点,则继续搜索,直到不再出现种子点为止[8]。
(4)填补空洞目标,使该目标具备完整目标轮廓。
(5)对完整目标轮廓进行腐蚀处理,处理边缘多余信息,结合形态学滤波对该轮廓进行膨胀处理后,可得到完整分割图像[9]。
1.2 图像预处理
因为无人机携带的相机是普通的单反非测量相机,其图像存在着边缘失真问题,所以需要对边缘失真进行修正处理,由相机标定获得相机主点、焦距、畸变参数以及修正、采集图像主要点变形参数[10]。无人机遥感影像受到天气状况影响,相邻空间邻域图像亮度和色彩存在较大差异。因此,对分割后图像进行色彩及亮度统一处理是具有必要性的[11]。采用统一的色彩处理无人机遥感影像,使图像在颜色、纹理和形状上保持一致。当对整个光线进行均匀处理时,应选择参考影像,参考影像可以从光照均匀的图片上切下一个小区域,然后调整到所需的色调。参考影像的选择应包括在均匀光照下的典型地物特征,尽量不要含有过多的水分,单光拍摄时不需要参考图像[12]。
1.3 建立对象层次结构
观察原始图像,根据目标物体的尺寸和特征分布情况,将多尺度分割成两个层次,并确定两个不同层次的权重。
目标层次结构如表1所示。
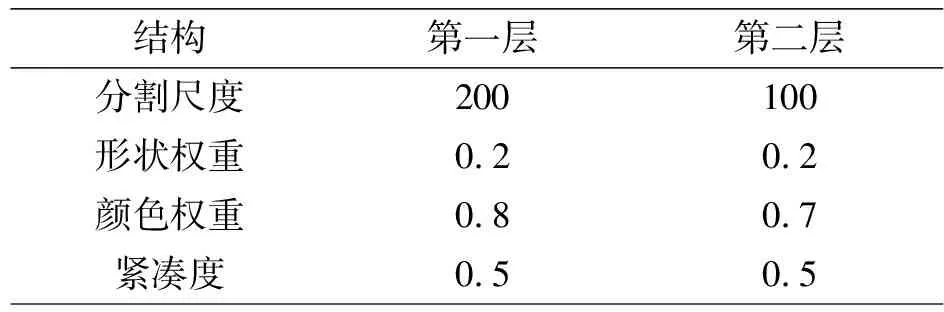
表1 目标层次结构
由表1可确定目标层次结构,以此对目标特征分类。
1.4 提取流程设计
在确定目标权重后,使用Hough变换技术提取目标轮廓信息,该方法中的量化变换程度决定了不同角度变化复杂性,若量化后过于粗糙,则无法变换为精确值;反之,若量化后过于精细,那么将会增加计算量。因此,将线的正确性和有效性结合起来,用积累的边点数来表示正确性,所以可以用五元组来表示线的正确性。
对一条边缘点线进行统计的算法是:首先统计边缘点数量,然后根据公式(2)计算终点与起始点距离。
L=((x,y),(x′,y′),E,θ,N)
(2)
公式(2)中:五元组分别为(x,y)、(x′,y′)、E、θ、N,分别表示起始点坐标、终点坐标、Hough变换结果、法线对横轴角度、有效边缘数量。
在提取边缘线时,需要删除一些短的线段,因为线段会使算法更加复杂,它不能作为划分区域的依据,所以需要删除,以有效值为基础选取线段,删除低于某阈值的线段,将线段向下延伸,作为图中焦点区域轮廓。
1.4.1 林地目标提取
林地覆盖程度与裸地或建筑区之间有明显差异,林带分布范围广,且相对完整相连,林地和耕地一般为深绿,其它为黄褐色或其它颜色。
设林地目标特征为F,其数学计算公式如式(3)所示。
(3)
1.4.2 建筑提取
对于其余未分类的图像对象,如果红色通道的平均值大于等于180,则判断该目标为高反射对象,由此进行精细提取,根据建筑物光谱特征,构建特征公式如式(4)所示。
(4)
公式(4)中:如果建筑物光谱特征B值在区间之间,则判别为建筑用地。
2 含噪图像平滑处理
为提高分割精度,采用模糊C均值聚类方法平滑处理噪声图像。利用灰度聚类隶属矩阵对图像平面上的隶属张量进行变换处理,详细过程如下。
step1,在确定迭代误差、最大迭代次数和聚类类别数后,获取一个分割后的初始隶属度D={vi};
step2,根据该隶属度计算其标记值如式(5)所示;
(5)
step3,依据该标记值进行第t步迭代处理,并更新隶属度标记值;

step5,依据标记的最大隶属度原则,判断迭代误差,计算公式如式(6)所示。
(6)
在此基础上,将得到的灰度聚类隶属度转化为图像RGB平面对应的隶属度张量,对隶属度进行均值(或中值)滤波处理后,输出标注值。
3 实验
3.1 实验数据
实验数据获取时间是2020年3月4日,使用SONY航拍相机获取的,斜拍镜头为40MM,拍摄区域位于江西省赣州市管辖范围内。
在实验研究过程中,分析无人机遥感影像中所含有的纹理数值,得到300mm*400mm图像,以此反映出影像视觉效果和纹理情况,如表2所示。
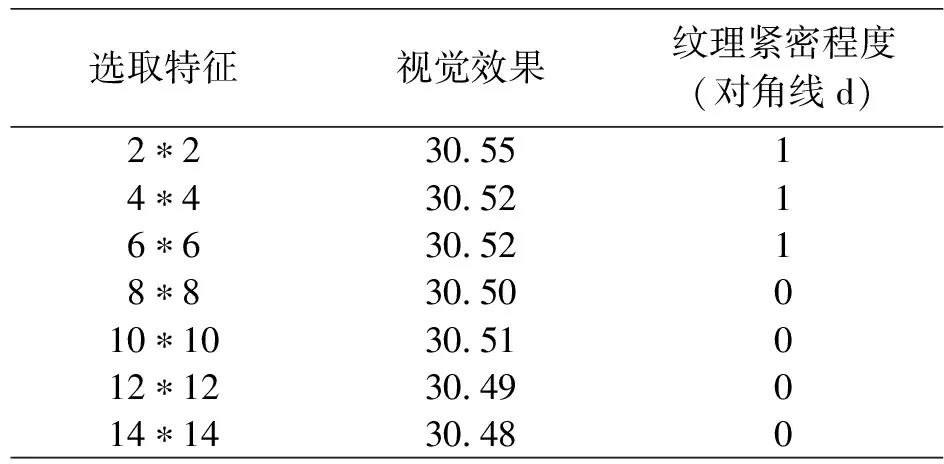
表2 纹理数值变化/3385×3385(px)
由表2可知,如果对角线上元素值较大,则说明该方向存在距离为d的相同灰度像素对,如果d为1,那么说明有两个灰度相同像素对,纹理变化频率较低;如果d为0,那么说明不存在两个灰度相同像素对,纹理变化频率高。
3.2 实验指标
正确提取占总提取总数的百分比就是总体提取精度,其反映总体全部特征提取正确程度,计算公式如式(7)所示。
(7)
公式(7)中,mii表示每一种提取种i类的正确提取数,M表示提取总数。
3.3 实验结果与分析
分别使用基于深度学习方法、基于Canny算子方法和基于图像分割技术提取裸地、建筑物、植被相关特征信息,通过特征提取精度分析所使用方法的有效性。
3.3.1 建筑物特征提取
分别使用三种方法提取建筑物特征信息,提取精度对比结果如表3所示。
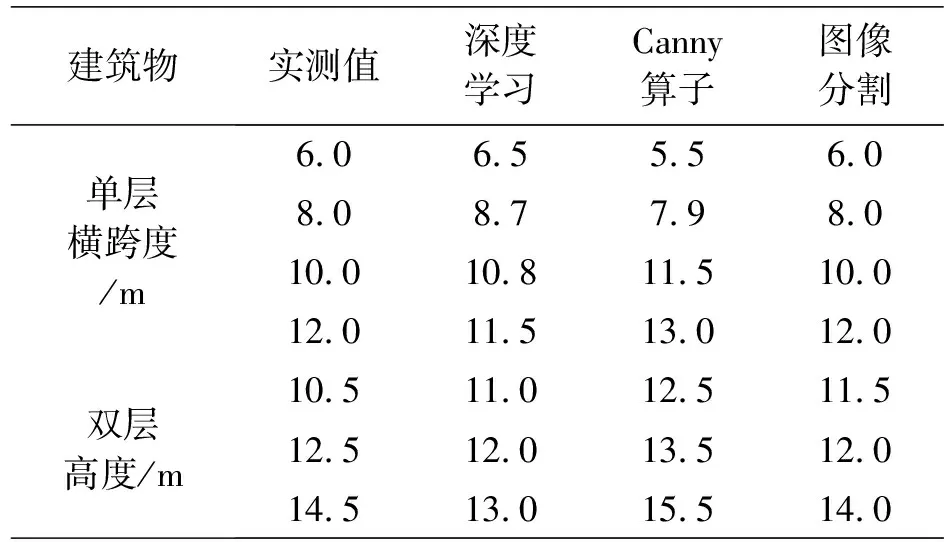
表3 三种方法建筑物特征信息提取精度对比分析
由表3可知,使用基于深度学习方法在单层横跨度下的最大提取误差为0.7m,双层高度下的最大提取误差为1.5m;使用Canny算子在单层横跨度下的最大提取误差为1.5m,双层高度下的最大提取误差为2.0m;使用图像分割技术在单层横跨度下的提取误差为0,双层高度下的最大提取误差为1.0m。因此,使用该方法建筑物特征信息提取精度较高。
3.3.2 植被特征提取
分别使用三种方法提取植被特征信息,树高提取精度对比结果如表4所示。

表4 三种方法植被高度特征信息提取精度对比分析/m
由表4可知,使用基于深度学习方法在树径为9.5~10.5cm时,与实测值相差最大为1.3m。在树径为6.5~7.5cm、7.5~8.5cm时,与实测值相差最小为0.4m;使用Canny算子提取技术在树径为5.0~5.5cm时,与实测值相差最大为1.6m。在树径为10.5~11.5cm时,与实测值相差最小为0.9m;使用图像分割提取技术在树径为5.0~5.5cm、6.5~7.5cm、10.5~11.5cm时,与实测值相差最大为0.1m,与实测值相差最小为0m。因此,使用该方法植被树高特征信息提取精度较高。
结语
无人机遥感技术的迅速发展,使其在遥感图像目标提取中得到广泛应用。无人机遥感图像目标提取技术以图像分割为基础,获得了较高的提取精度,在很大程度上可以取代基于深度学习方法、使用基于Canny算子方法的提取方法,具有一定的推广价值。该方法在实现无人机遥感影像目标自动提取的同时,满足了无人机遥感影像目标参数统计的要求。但由于测试数据一般不具有代表性,在以后的研究过程中,还需要收集实验数据进行进一步验证和分析。由于外部环境的影响,目标提取过程中,提取结果参数不完全。部分目标图像中心点参数无法提取,导致提取结果存在一定误差。为提高目标提取的准确度,在今后的研究中,需要根据不同的图像参数,实现目标的自动提取。