分布式调相机励磁系统参数优化模型研究
2022-03-15付敏崔灿灿王璐瑶马春旭印钊阳
付敏, 崔灿灿, 王璐瑶, 马春旭, 印钊阳
(哈尔滨理工大学 电气与电子工程学院,黑龙江 哈尔滨 150080)
0 引 言
化石能源短缺及环境恶化问题日益突出,各国逐步加强对风光等可再生能源的利用开发[1-2],但可再生能源大多位于偏远地带,距离负荷中心较远,抵御系统冲击能力较弱。根据工程运行经验,系统某处发生故障会引起风场并网点电压瞬间大幅跌落,电气联系紧密的风机会发生部分甚至全部脱网。故障切除后,风场内及风场间的传输功率减小,风场升压变电站投入的并联电容及线路充电电容发出的无功相对于线路消耗的无功出现过剩,导致并网点电压急剧升高,从而引起相邻风场的风机因高压脱网,剩余的无功功率进一步增加,脱网事故的区域面积也进一步扩大[3-6]。因而需在可再生能源变电站配置无功设备吸收过剩无功,目前风场动态无功补偿装置主要有静止无功补偿器(static var compensator,SVC)和静止无功发生器(static var generator,SVG)两种[7-9]。
SVC和SVG的无功出力受系统故障电压和过流能力的制约,在电压水平较低的情况下难以提供足够的无功支撑[10-12]。而调相机的过负荷能力远大于SVC和SVG,电压跌落幅度较大时,可以短时发出额定容量2倍以上的无功功率,在系统瞬时无功支撑方面具有明显的优势[13]。此外,调相机的高、低压穿越能力更强,一定程度上可以提高可再生能源系统的短路容量,在稳定并网点电压和抑制可再生能源脱网方面有望发挥重要作用。国内已有大容量调相机在特高压直流系统中的运行经验,同时为适应可再生能源场站工作要求,电机设备制造厂商正在研制具备更好的瞬时无功输出和无功连续调节能力的新型分布式调相机。
现阶段已有学者针对特高压直流系统中调相机无功特性的关键技术参数进行研究。文献[14-17]通过分析定转子电流的时域表达式,指出调变机组的等效电抗和直轴次暂态电抗是次暂态特性的主要影响参数。此外,暂态响应速度由直轴瞬态和超瞬态时间常数决定,而稳态无功输出则取决于短路比。文献[18]中,将自动励磁调整系统等效为一阶传函,重点研究了电磁参数对调相机动态特性的影响,而未考虑励磁参数的影响。
因此,本文在文献[18]研究成果基础上,深入研究励磁系统参数改变调相机动态特性的能力,通过对有效无功电流增益进行频域灵敏度分析,确定影响调相机动态无功特性的关键励磁参数及其优化规律。以有效无功电流增益为目标函数,采用全维更新策略,利用平均频域灵敏度指导改进蜂群算法的寻优方向,建立励磁参数的优化模型并进行求解。进一步在国内某风电系统中针对所提出的励磁参数优化模型进行时域仿真验证,为调相机工程运行提供技术支撑。
1 调相机的动态特性
分布式调相机通过升压变压器接于可再生能源发电场的汇流母线。由文献[19]可知,调相机d轴电压Ud≈0,q轴电压Uq≈U,电压波动时无功增量ΔQ主要取决于d轴无功电流增量ΔId,研究励磁参数对ΔId的影响,即可得到其对调相机无功特性的影响。
参考文献[14]推导出ΔId与ΔU的传递函数为
(1)
式中参数A、B及a可表示为:
(2)
(3)
(4)
为保证风力发电机实现高压或低压穿越,需要调相机的输出无功随电压波动而快速改变,故而调相机通常采用自并励静止励磁系统,如图1所示。其中:T、K分别为各环节时间常数和放大倍数;下标t、A、Z分别为励磁系统测量、放大和整流环节;下标P、I、D为并联PID控制器的比例、积分、微分环节;kM为最大励磁输出电压。
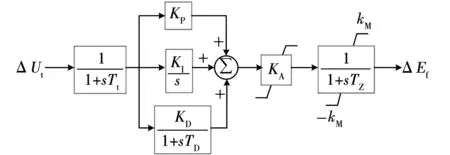
图1 励磁系统框图Fig.1 Block diagram of excitation system
图1表明,ΔId可以由ΔU单一表示为
(5)
式中bi、cj分别为分母和分子降次排列的各项系数,均与电磁和励磁参数有关。
当输电线路发生短路等故障时,调相机迅速进行强励磁,励磁输出电压可短期维持在最大饱和值kM。强励期间表达式为
(6)
式中下标0表示故障前调相机的初始值。
已有文章研究电磁参数对调相机无功特性的改善作用,本文在此基础上主要研究励磁参数对调相机动态无功特性的影响。而强励期间ΔId仅与kM有关,研究表明kM越大,调相机的暂态无功响应越快。因此本文不再对参数kM进行重复分析。
2 励磁参数影响动态特性的机理
2.1 动态特性评价指标
为保证系统动态无功平衡,调相机的ΔId应与ΔU呈负相关。定义有效无功电流增益KiQ为调相机动态无功特性的评价指标,有
(7)
频域分析,有
KiQ=|G(jω)|cosθ=Re(G(jω))。
(8)
式中:G(jω)=ΔId(jω)/ΔU(jω);θ为G(jω)的相角。
整理得到,与式(5)相对应的KiQ表达式为
(9)
式中d表示频率系数。
由式(9)可知,KiQ值与频率唯一对应,且数值越大,表明单位电压变化引起的无功增益越大,调相机在该频率下的动态无功特性越优良。整个频段内调相机的平均无功电流增益KIQ越大,调相机的动态无功输出能力越强。
低频段内,调相机的有效无功电流增益KiQ主要取决于频率系数d7和d13,表达式为
(10)
高频段内,KiQ基本不受频率系数的影响,即
(11)
低频段的KiQ明显要高于高频段的KiQ,表明调相机的KiQ在整个频段内的分布并不均匀。因此,利用KiQ分析调相机的动态特性时,不仅应考虑整个频段内的平均有效无功电流增益KIQ,还应考虑极值minKiQ的分布情况。minKiQ越大,表明整个频段内KiQ分布越均衡,调相机的动态特性越优良。
此外,通过各频率下励磁参数对KiQ的影响程度可以判断励磁参数对调相机动态无功特性的影响。该影响程度可以通过频域灵敏度(即∂KiQ/∂X)进行分析,其中X为励磁系统各参数。在一个频段下∂KiQ/∂X的数值大小与参数X对KiQ的影响有关,数值越大影响也越大;而数值的正负表明参数变化方向对KiQ的影响,当∂KiQ/∂X<0时减小参数X,KiQ值会增大,当∂KiQ/∂X>0时增大X有利于KiQ的增大。
2.2 励磁参数的频域灵敏度分析
对式(5)中各励磁参数求偏导,得到KiQ对励磁参数的频域灵敏度,如图2所示。
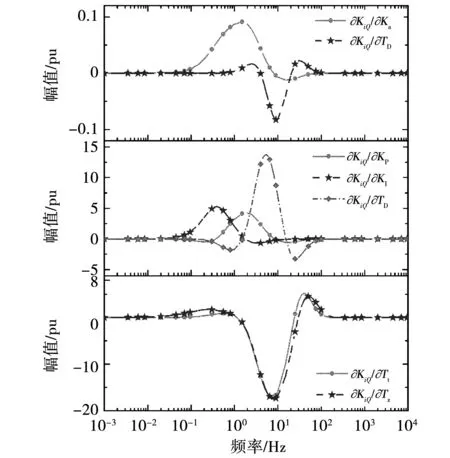
图2 励磁参数的频域灵敏度Fig.2 Frequency domain sensitivity of excitation parameters
对比图2中各参数的频域灵敏度,明显发现与其他励磁参数相比,∂KiQ/KA和∂KiQ/∂TD小了两个数量级,表明参数KA和TD对调相机动态无功特性的影响较小。因此在建立励磁参数的优化模型时,可以忽略KA和TD,重点研究参数KP、KI、KD、Tt和TZ对调相机动态特性的影响。
参数KP的频域灵敏度呈现正、负交替的现象,∂KiQ/∂KP在0.1~0.6 Hz频段及6~40 Hz频段均稍小于0,理论上减小KP一定程度上可以改善调相机的动态无功特性。但在0.7~5 Hz频段∂KiQ/∂KP为正且绝对值远大于低频、高频段,减小KP会明显削弱调相机的暂态无功特性。综合考虑,应该增大KP以提升调相机中低频段的暂态无功特性。同理,应该增大KI和KD,减小Tt和TZ以提高调相机的动态无功特性。
基于上述优化规律确定调相机励磁参数优化的4个可行方案,如表1所示。图3所示为不同方案时有效无功电流增益随频率的变化曲线。
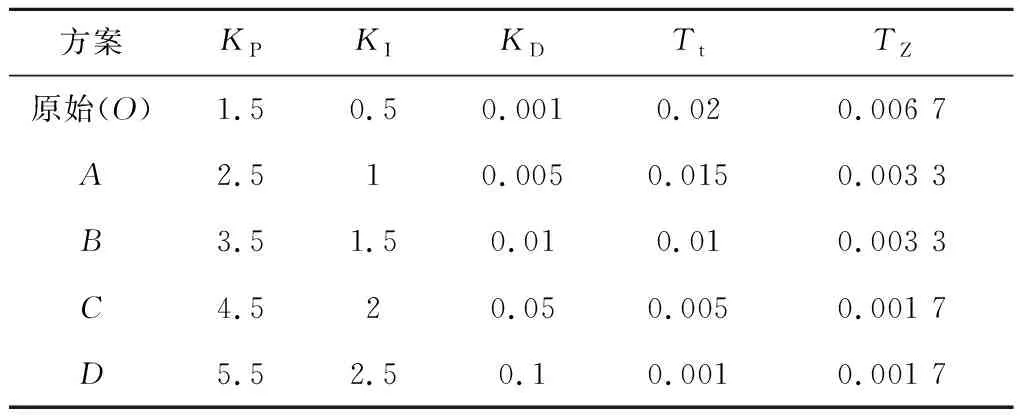
表1 励磁参数优化方案
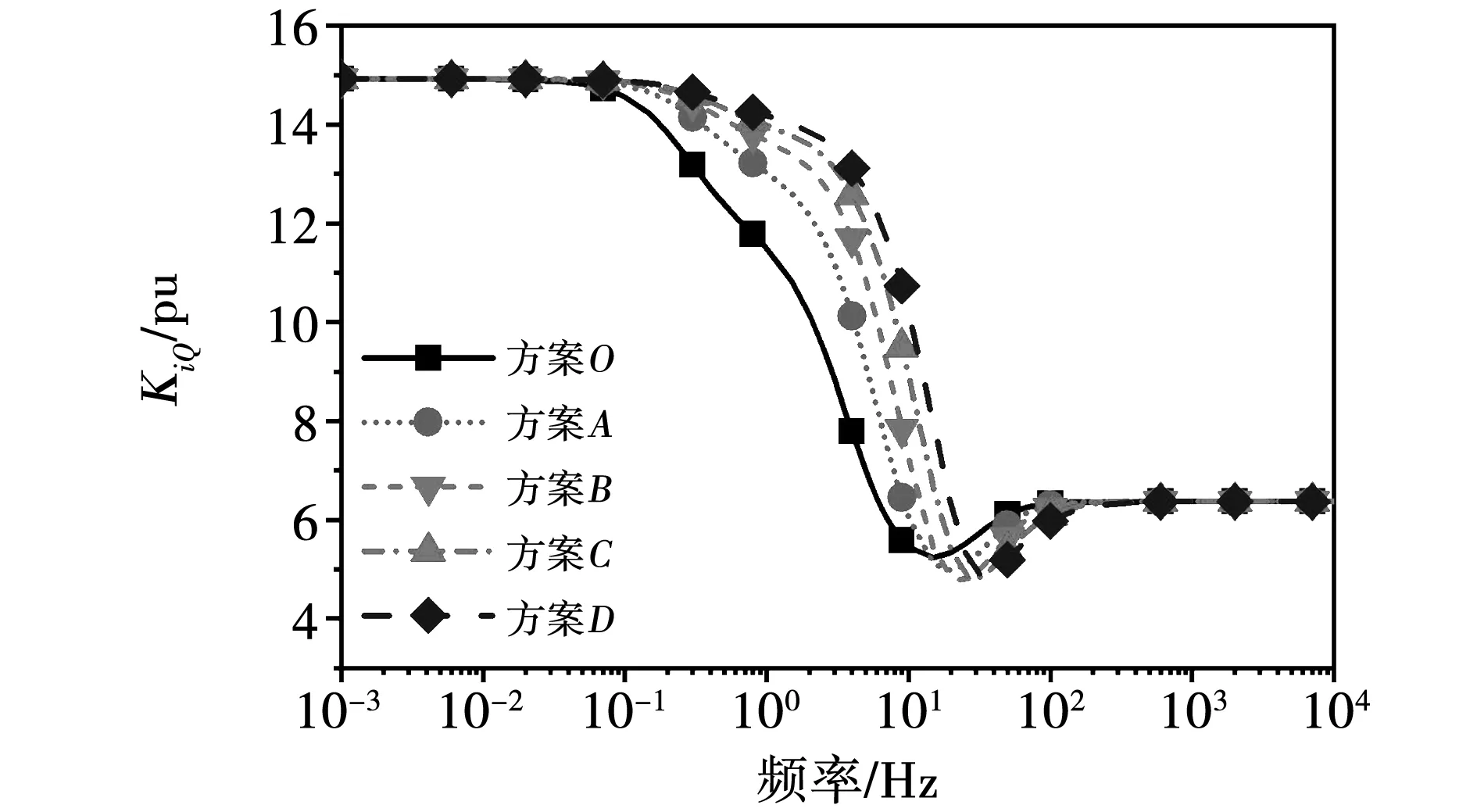
图3 KiQ随频率的变化曲线Fig.3 Variation curves of KiQ with frequency
从图3可以看出,4种方案均使得25~100 Hz频段内调相机的KiQ的数值略有减小,降低值不超过0.96。但可以明显提高0.02~15 Hz频段内KiQ的数值,最大提高值为5.76。总的来说,优化励磁参数可以提高调相机的暂态无功输出,改善调相机的动态无功特性。因此,有必要基于智能算法建立励磁参数的优化模型,以使得调相机可以最大限度地发挥其无功支撑的能力。
3 基于改进ABC算法的励磁参数优化模型
3.1 目标函数及约束条件
对励磁系统进行参数优化,决策变量为参数KP、KI、KD、Tt和TZ。图4所示为4种可行方案下KIQ和minKiQ的分布情况。
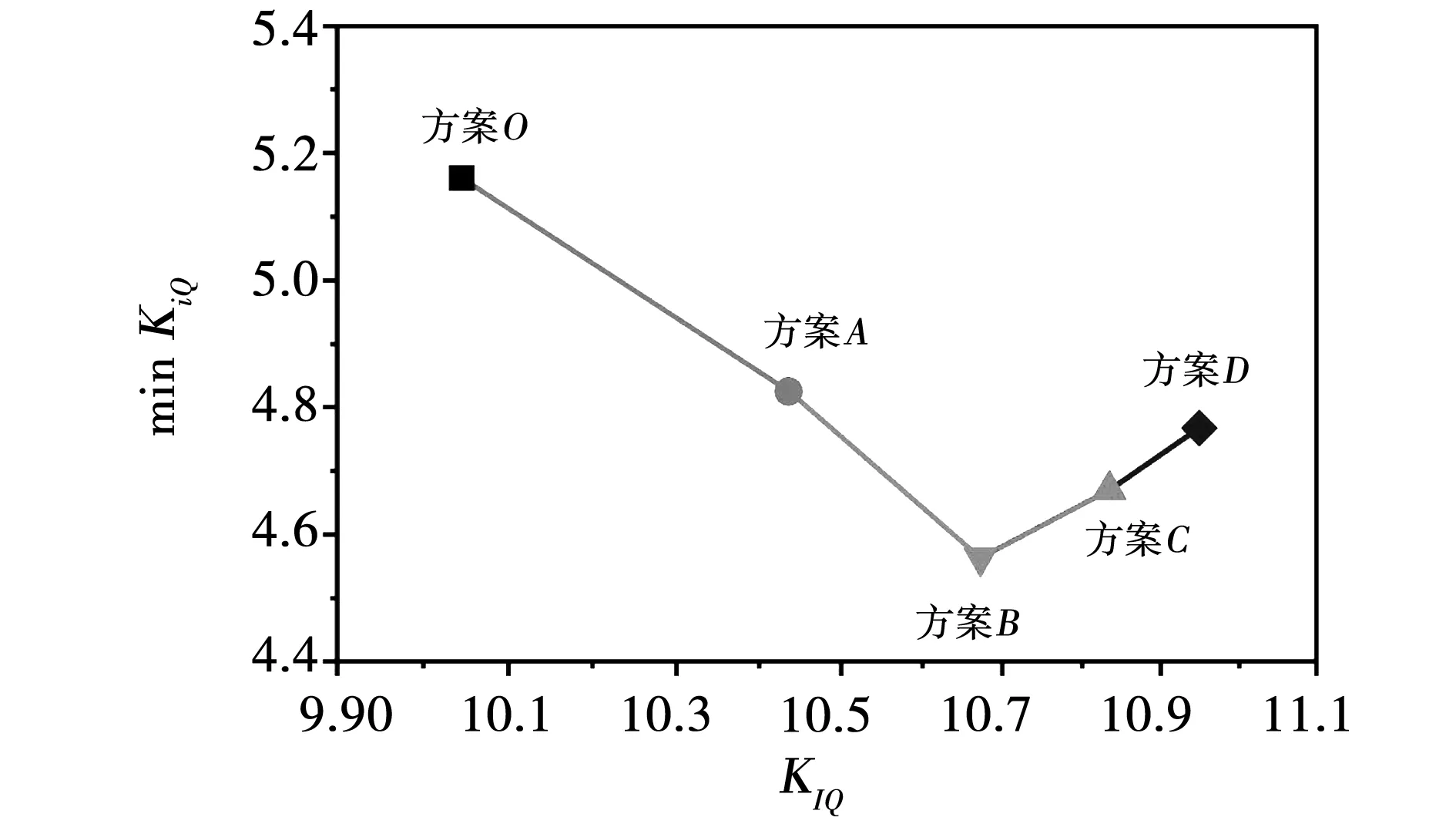
图4 KIQ和min KiQ的变化曲线Fig. 4 Variation curves of KIQ and min KiQ
图4表明,优化励磁参数虽然降低了minKiQ,但可以明显提高KIQ。而且,从方案A至方案D,KIQ不断增大,而minKiQ则先减小后增大,表明励磁参数对KIQ和minKiQ的影响效果不同,优化时应综合考虑KIQ和minKiQ。
励磁参数直接影响调相机输出的无功,因此由无功评价指标KIQ和minKiQ构造目标函数,以表征调相机输出无功功率最大,即
J=c1KIQ+c2minKiQ,c1+c2=1。
(12)
式中c1、c2分别为KIQ与minKiQ的调节系数。
优化的目的是使调相机在短时间内尽可能多的输出无功功率,同时应兼顾KiQ极值对调相机无功响应的影响。因此,将minKiQ和励磁参数作为约束条件,参数优化模型可表示为:
(13)
式中下标max、min分别表示最大值和最小值。本文KP的取值范围为[1,8],KI的取值为[0,8],KD的取值为[0,1],Tt的取值范围为[0.001,0.02]。
3.2 维度更新策略改进
经典ABC算法每次搜索食物源时仅对励磁参数的某一个维度进行更新,无疑会降低算法的收敛速度[20]。4种方案下目标函数随搜索维度的变化如图5所示。其中,搜索维度为2时,对参数KP和Tt进行更新,此种励磁参数组合在二维搜索时对应的目标函数最大。其余搜索维度与之类似。
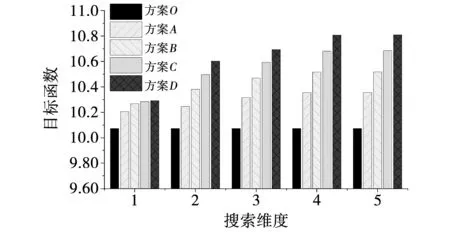
图5 搜索维度关系图Fig.5 Search dimensional relationship diagram
从图5中可以看出,与单一搜索维度相比,随着搜索维度的增加,目标函数不断增大,单次搜索到的食物源质量更加优良。因此,改进ABC算法采用全维搜索,单次搜索时对励磁参数的所有维度同时进行更新。此外,搜索维度相同时,不同可行方案搜索到的食物源质量有较大差异,有必要对食物源位置更新策略进行进一步改进。
3.3 食物源位置更新改进
经典ABC算法中,引领蜂和搜索蜂在对食物源进行领域搜索时,只引入随机个体,没有考虑种群最优食物源,容易导致引领蜂随机搜索,陷入局部最优解。受粒子群算法中粒子速度搜索公式启发,采用引导策略,在ABC算法位置更新中引入全局最优个体学习因子c1[21-22]。
同时,根据食物源所携带的信息,分析励磁参数的频域灵敏度,以此来判断食物源的搜索方向。根据前面的分析,发现频域灵敏度小于0时应减小参数,反之则增大参数。因此,蜜蜂种群在进行位置更新前,需要判断整个频段内参数的平均频域灵敏度AKiQ。AKiQ大于0,表示搜索方向为增大参数,种群位置更新公式中随机数φ的取值范围为[0,1];反之,φ的取值范围为[-1,0]。改进ABC算法中种群位置更新公式为:
(14)
式中xmax为迄今为止种群搜索到的最优食物源。
位置更新方式中引入学习因子c1,使食物源随算法迭代快速收敛至最优解xmax,加快了算法的收敛速度。进一步地,在AKiQ引导作用下,引领蜂和跟随蜂在最优解附近进行定向开发,增强算法的开发能力,避免种群过早陷入局部最优解。
3.4 优化效果分析
利用改进ABC算法对上述励磁参数优化模型进行求解,得到目标函数的迭代曲线如图6所示。
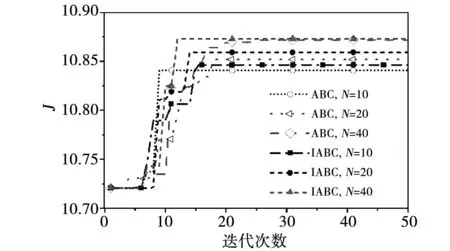
图6 算法迭代曲线图Fig.6 Algorithm iteration graph
由图6可知,随着蜂群总数的增加,改进ABC寻优算法可更为准确的找到质量更优的食物源,使得调相机的动态无功特性更为优良。此外,当蜂群总数为20时,改进ABC算法迭代至第14次时即可达到收敛,而经典ABC算法需要迭代至第18 次;当蜂群总数为 40 时,改进 ABC 算法迭代至第12次即可达到收敛,而经典ABC算法需要迭代至第 25 次时达到收敛。因此,较经典ABC算法相比, 改进ABC算法可以显著提升收敛速度。
经智能算法求解优化模型后,励磁参数的优化前后的取值如表2所示,评价指标如表3所示。从表3可以看出,该算法优化会降低minKiQ,表明优化后的励磁参数会降低某个频段间KiQ的数值。但优化后的励磁参数可以明显提高KIQ,表明优化励磁参数可以明显增大某个频段间KiQ的数值,从而提高调相机在整个频段的平均有效无功电流,改善调相机的动态无功输出。此外,相比于经典ABC算法,改进ABC算法兼顾了KIQ和minKiQ对调相机动态无功响应的影响,在提高平均有效无功电流的同时,均衡了整个频段内KiQ的分布,不致出现特殊工况下调相机的动态无功响应不足。
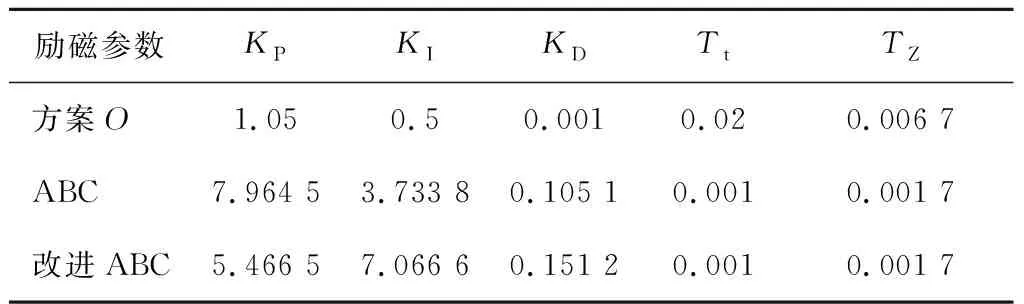
表2 励磁参数优化结果
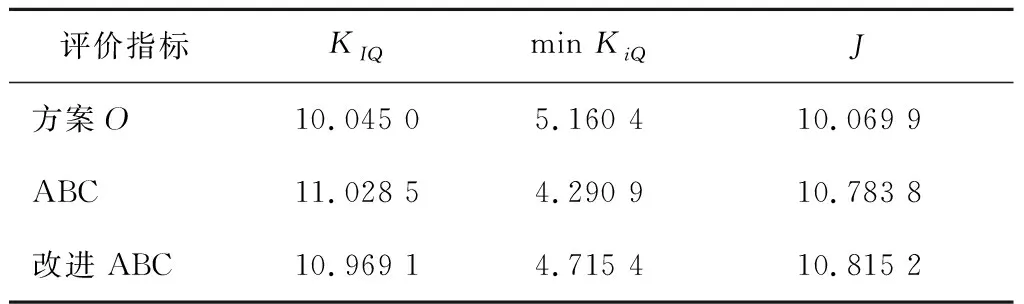
表3 励磁参数评价指标
将经算法优化的励磁参数的控制效果与原始参数的控制效果作一比较,得到有效无功电流增益KiQ随频率的变化特性表示如图7所示。
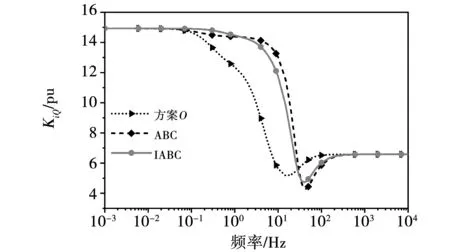
图7 KiQ的变化曲线Fig.7 Variation curves of KiQ
由图7可知,优化励磁参数使得27~350 Hz的高频段KiQ略有减小,但可明显提高0.07~27 Hz频段间的KiQ,表明算法优化后的励磁参数可以提高调相机的暂态和稳态无功输出。此外,与经典ABC算法相比,改进ABC算法优化的励磁参数虽然使得0.85~27 Hz频段间的KiQ值有所减小,但可以增大minKiQ,使得整个频段内KiQ的分布更加均衡,有利于改善调相机的动态无功特性。
4 仿真算例
为验证理论分析及优化励磁参数对调相机动态特性的影响,根据国内某风电场的应用情况,利用SIMULINK软件建立其电磁暂态模型来进行仿真研究。该风电场装机200 MW,采用0.69/35 kV两级电压,升压后通过集电线路送入远端330 kV母线,系统接线图如图8所示。其中,分布式调相机作为场站动态无功补偿装置装设在330 kV变电站35 kV侧。分别分析随机风速变化、单相接地和整流侧无功骤增工况下调相机的无功响应。
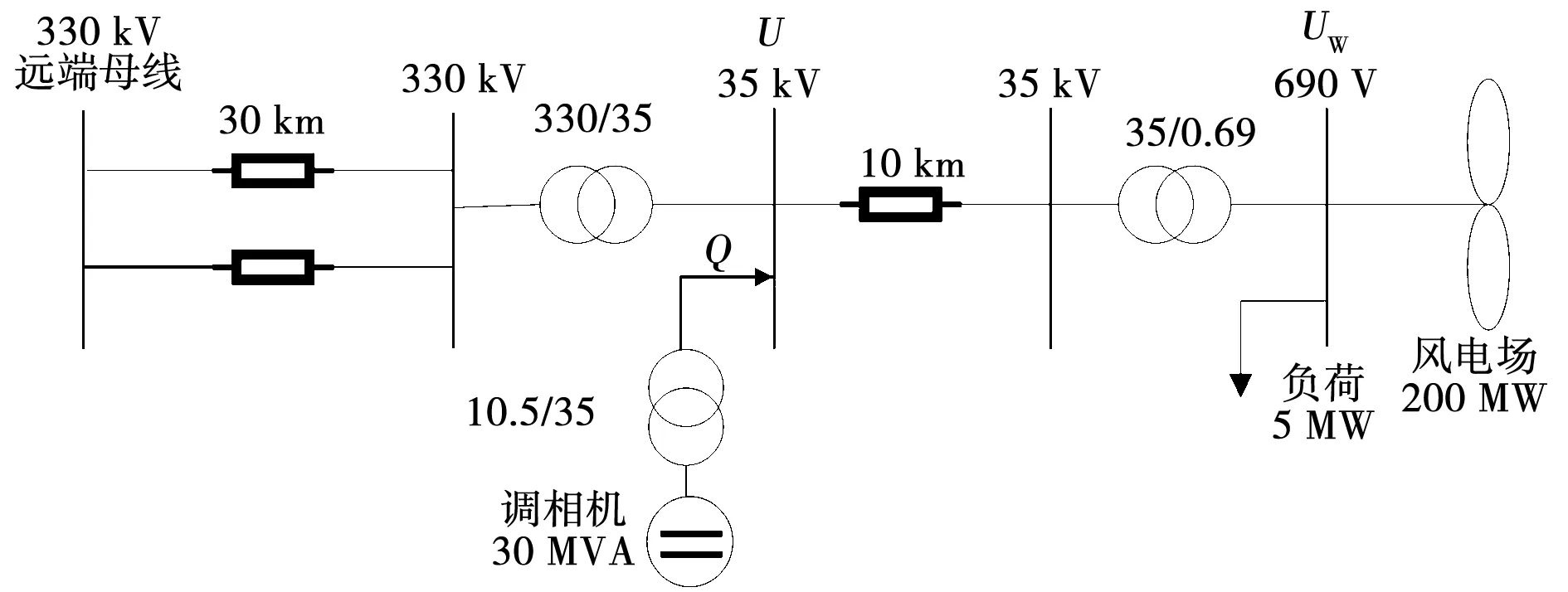
图8 系统接线图Fig.8 Connection diagram of the system
情形一:设置10 s后受随机风影响,系统内无功持续变化引起母线电压不断波动。图9所示为扰动期间调变机组和风电场端电压的运行曲线。
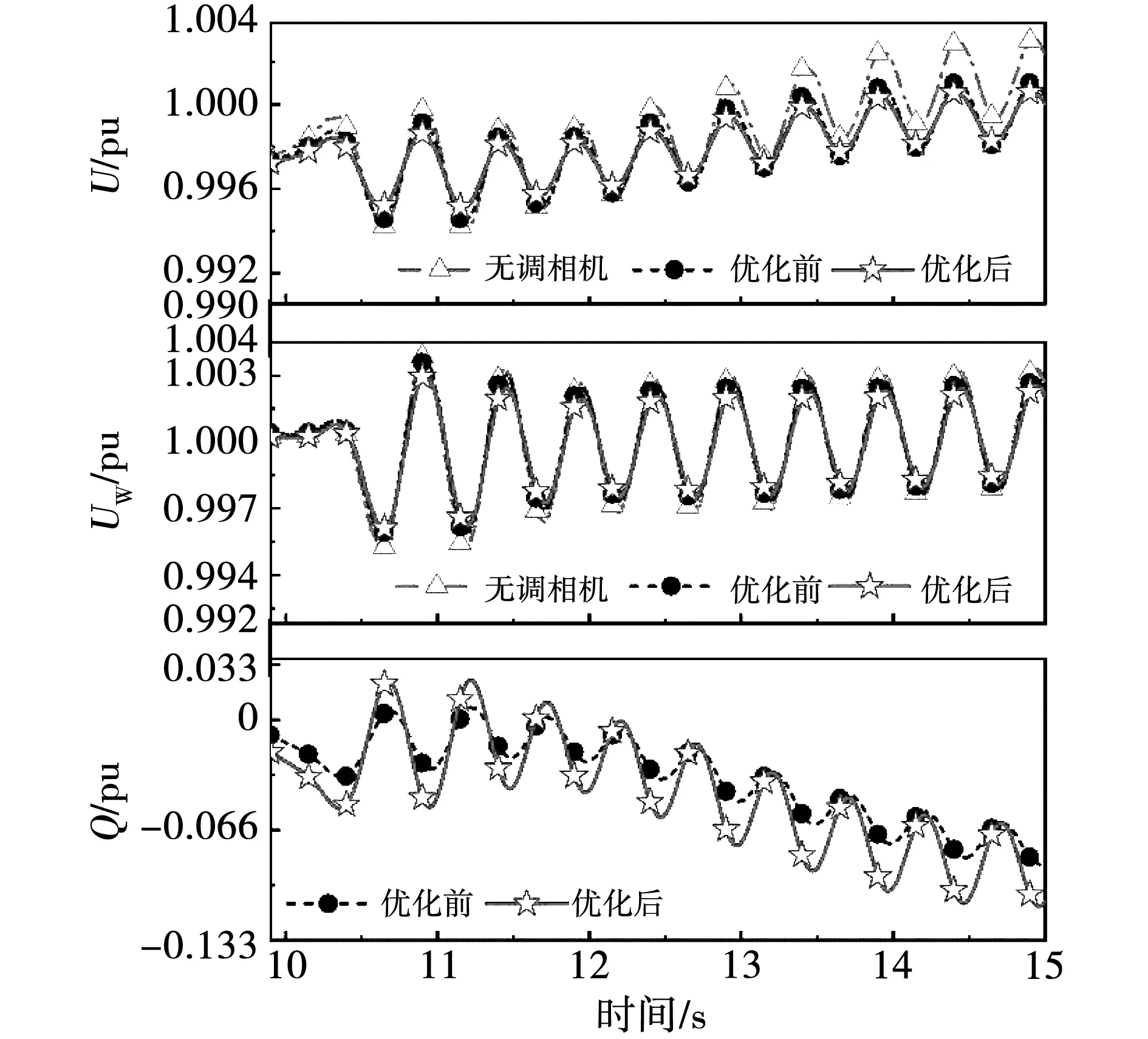
图9 随机风速仿真对比Fig.9 Simulation comparison of random wind speed
图9表明在自动励磁调节系统的作用下,配置在风电场场站的调相机可以随电压变化迅速改变输出的无功功率,以减小电压波动的幅值,将母线电压稳定在额定值附近。此外,利用改进ABC算法对励磁参数进行优化,可以进一步降低母线电压波动幅值,保证风力发电机稳定运行。
情形二:设置10 s时远端输电线发生单相接地短路故障,0.1 s后故障切除。图10所示为故障前后调变机组和风电场端电压的运行曲线。
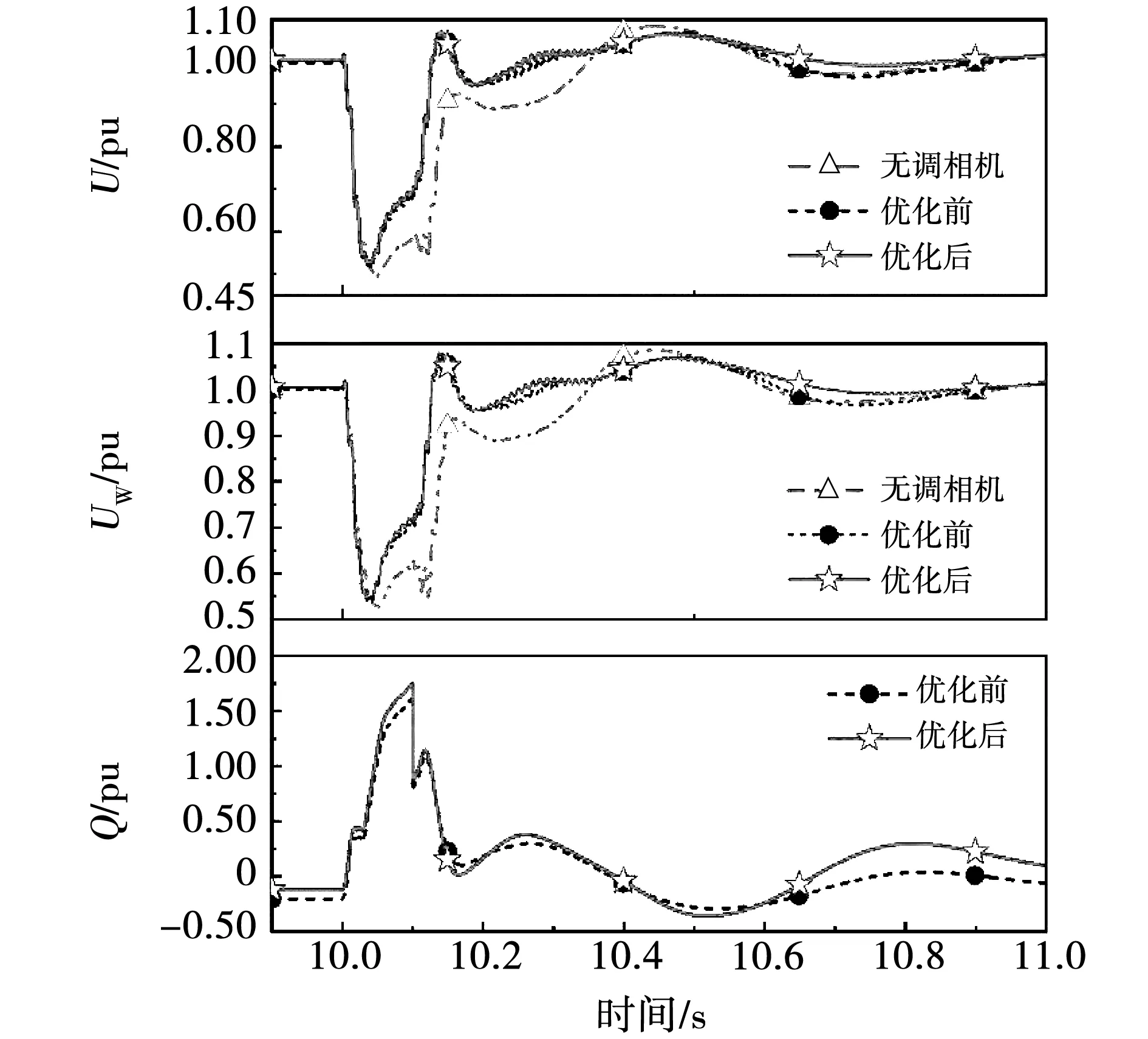
图10 单相接地仿真对比Fig.10 Simulation comparison of phase-to-earth fault
由图10可以看出,短路期间,调相机瞬间强励,增发大量感性无功,以支撑母线电压。优化前调相机的无功功率经18 ms可达到0.36 pu,无功在100 ms内增加了1.62 pu,风电场端电压提升了0.26 pu。采用改进ABC算法对励磁参数进行优化后,经17 ms无功即可升至0.43 pu,100 ms内无功多增发了0.07 pu,风电场端电压多提升了0.02 pu。优化后调相机的无功响应速度更快,无功输出更多,对场站电压的支撑能力更强。
故障消失后,优化后的调相机励磁电压改变极性,迫使励磁绕组磁链尽快下降,加速无功调节,以减小电压恢复时间。虽然会引起风机暂时过电压,但在风电场稳定运行范围内,不会造成风机高压脱网。综合考虑故障前后调相机和场站母线的运行情况,发现优化后调相机的动态无功特性更为优良,对系统电压的支撑能力更强,为风力发电机实现低压穿越提供了可靠保障。
情形三:设置10 s时整流侧无功功率骤增,引起远端母线升高15%,风电场的端电压短时间内迅速升高。图11所示为故障前后的仿真曲线。
由图11可以看出,电压骤升期间调相机吸收大量感性无功,以降低场站电压。优化前调相机的无功功率在47 ms内降低了0.75 pu,风电场端电压经290 ms基本稳定。采用改进ABC算法优化励磁参数后,无功经48 ms便可降至0.84 pu,风电场端电压调节时间缩短至150 ms。此外,与优化前相比,电压骤增瞬间风电场端电压多降低了约0.01 pu。优化后调相机的无功响应速度更快,吸收的感性无功更多,对场站电压的支撑能力更强,为风力发电机实现高压穿越提供了可靠保障。
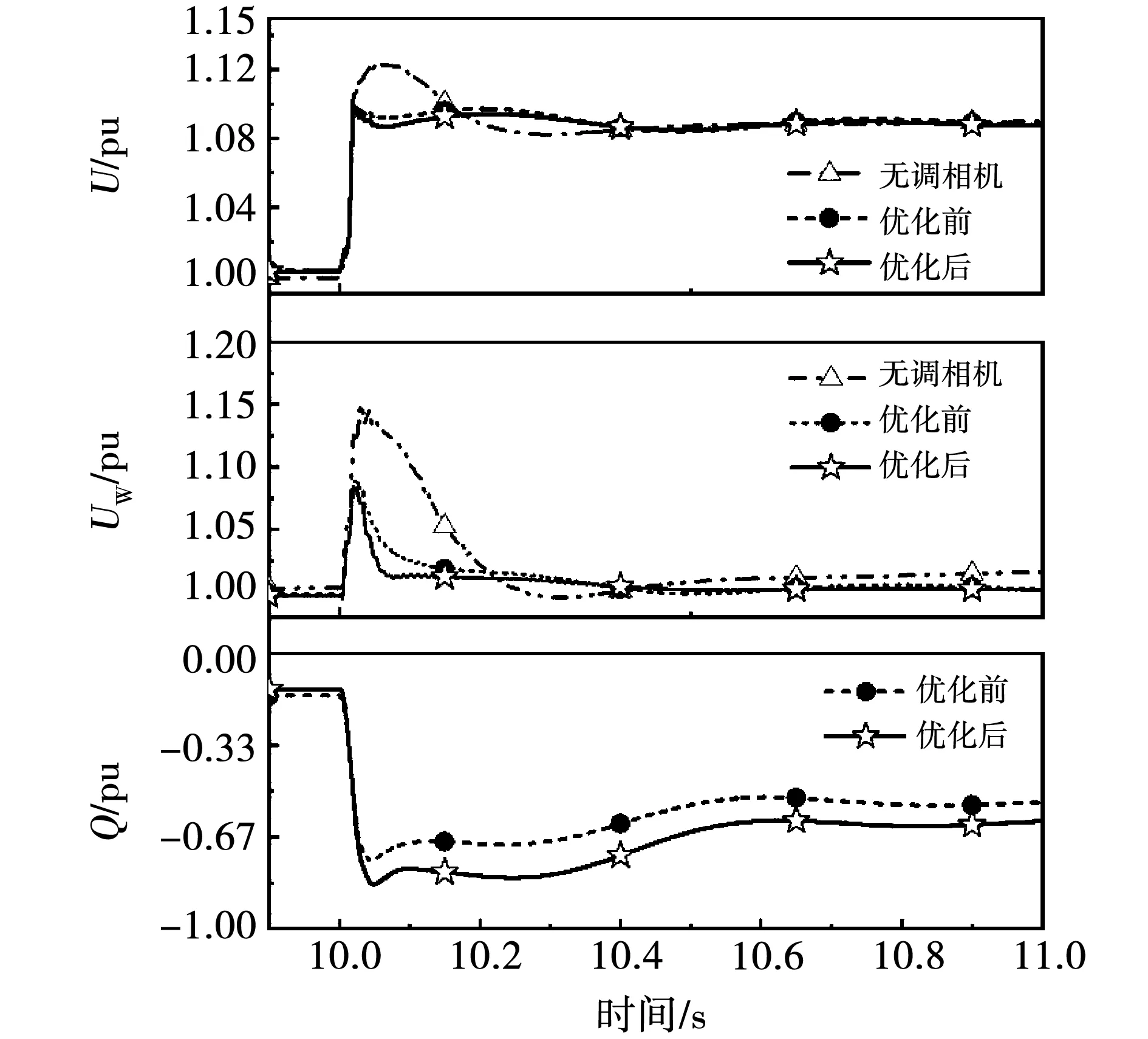
图11 电压骤升仿真对比Fig.11 Simulation comparison of voltage swell
与优化前相比,优化后励磁绕组磁链的变化速度更快,使得调相机可以在更短的时间内输出更多的无功功率。换言之,优化后的调相机可以更好地保证电网内无功功率的平衡和稳定系统电压,从而保证风力发电机实现高压或低压穿越。
5 结 论
针对新能源场站缺乏足够的无功调节能力引发新能源大面积脱网问题,本文提出了一种基于改进ABC算法的励磁参数优化模型,使得配置于场站的分布式调相机能最大限度地发挥其无功调节的能力。主要结论如下:
1)KiQ对励磁参数的频域灵敏度表明,KA和TD基本不影响调相机的动态无功特性。增大KP、KI和KD,减小Tt和TZ可以提高调相机的动态无功输出。
2)以KiQ为目标函数,采用全维更新策略,利用平均频域灵敏度指导改进ABC算法的寻优方向,可以明显提高算法的收敛速度。采用该算法求解励磁参数优化模型,使得整个频段内KiQ的分布更加均衡,有利于改善调相机的动态无功特性。
3)国内某风电系统仿真结果表明,利用本文提出的励磁参数优化模型得到的励磁参数能在有效减小电压恢复时间的同时显著提高调相机的动态无功输出,从而降低系统电压波动幅值,保证风力发电机实现高压或低压穿越。
本文分析过程中未考虑磁路饱和,在系统电压变化较大时会引起调相机的磁路饱和,可能会对本文所提出的励磁参数优化模型产生影响,这还需要进一步研究。
