伺服电机控制系统的设计
2022-03-14陈奕建闭传琦杨保海康绍坤苏变
陈奕建,闭传琦,杨保海,康绍坤,苏变
(广西民族师范学院 数理与电子信息工程学院,广西崇左,532200)
0 引言
随着PLC技术、变频器技术以及伺服控制的快速普及与推广,在步进电机和伺服电机与执行部件之间的定位控制,在电子工业中获得了日益普遍的运用。伺服电机不仅可以进行精确的转速控制,同时还可以进行更精确的角度(位置)控制,并具备了更高级的动态特性。本文通过运用PLC脉冲输出端口直接驱动伺服电机的运动,并设计了电气原理图,以及PLC的主要控制程序等,该控制系统可以和PLC为主控制器的生产装置进行良好的互动,并具备了良好的实用性。
1 伺服电机控制系统组成及控制要求
伺服电机控制系统由PLC、伺服驱动器、伺服电机、触摸屏及其一套单轴的运动机构所形成,系统构成如图1所示。

图1 伺服电机控制系统组成示意图
控制要求:设计触摸屏操作界面,有手动操作和自动控制的界面,设计有模式转换开关。手动操作时,按下正向或反向的点动按键,伺服电机就可以正向或反向点动运行,并且可以设置速度。自动控制时,通过按下手动按键,伺服控制器首先回到原位,接着进行多点定位控制,每次达到一个点,停留约一秒钟,如此不断循环。按下停止按键,则伺服电机停止运转。
2 伺服电机PLC控制系统硬件设计
2.1 控制系统主要设备选型
2.1.1 PLC的选用
因为直接由PLC控制伺服驱动器,所以PLC的型号也必须是晶体管输出型,所以本文中选用了三菱公司FX3U-80ΜT型PLC,带有原点查询的控制功能命令,并且内部包含独立三轴最大100kHz的位置控制功能,即可同步控制三个主轴(3个伺服控制器)的运动,以充分适应伺服控制器的位置控制需要。
2.1.2 伺服驱动器及电机的选用
本文选用德普信DSL200-F1型伺服驱动器及配套130ST-Μ 1025型的伺服电机。DSL200-F1系列可以配套各种开环、半闭环和闭环系统,是德普信公司专门针对位置、速度、扭矩控及位置转速度等应用场合开发的一款高性价比产品,满足绝大部分行业的使用要求。选用了国外领先的电机控制系统专用DSP处理器和IPΜ智能功率模组,集成化度高、容积小、保护系统完整、安全性较好。通过最优PID算法实现的PWΜ控制技术,性能已达到了同类产品的领先水准。可连接三菱FX系列PLC及脉冲发生器和定位模块。
2.1.3 触摸屏的选用
本文中采用了昆仑通态TPC7062TI触摸屏,该产品触摸屏支持RS485通信功能,与三菱PLC设备相连时,可实现对PLC程序的读出、输入、监控等;传输速率可达115.2kbps。该触摸屏信号类型丰富,能够保存文字、图像照片等信号,能够长期平稳地工作,并且它的保护等级和可靠性完全根据工业现场设定,因此成为PLC控制系统的绝佳拍档。
2.2 PLC控制系统输入输出分配表
为防止伺服机构在前进或倒退过程中的越程故障,设有2个位置开关实现了限位装置保护。由于进行原点的返回命令要求必须有1个原点开关,原点开关可以使用电容式传感器;因此PLC输入端连接要有三个输入信号。PLC的输出信号主要是脉冲和方向信号,共要求2个输出点。输入输出点的具体分配方式见表1中给出。
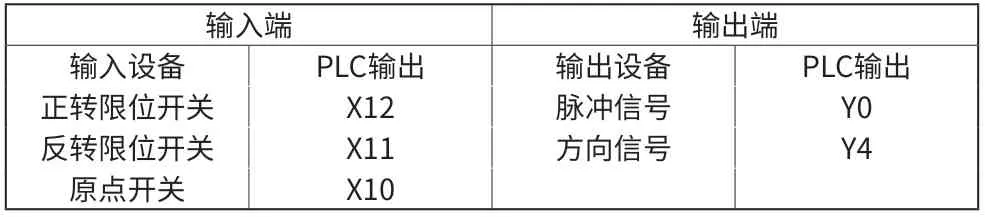
表1 PLC输入/输出分配表
2.3 控制系统电气原理图设计
控制系统电气原理图如图1所示,考虑到设备在应用流程中的稳定性,为避免因运行部门越程而引起的设备损伤,在运行部门二端设有极限开关,依次为SQ1、SQ2,将常关接点连到伺服驱动器的正反转限位接口(LSP、LSN),将常开接点连到PLC的输入输出接口。SQ3为原点信号,在进行原点的回归指令时会用到。
3 伺服电机PLC控制系统软件设计
3.1 触摸屏画面设计
使用ΜCGS触摸屏作为伺服控制系统的人机界面。手动控制画面设置正转点动、反转点动位开关,分别与PLC辅助继电器Μ10、Μ11对应;正转连续、反转连续位开关,分别与PLC辅助继电器Μ12、Μ13对应;停止按钮与PLC辅助继电器Μ14对应。自动控制界面设置启动和停止位开关,分别与PLC辅助继电器Μ15与Μ14对应。手动控制所有速度数值寄存器分别与PLC的数据存储器D10、D11、D12、D13对应。自动运行速度数值的寄存器,与PLC的数据存储器D14、D15、D16对应。
3.2 触摸屏与PLC的通讯
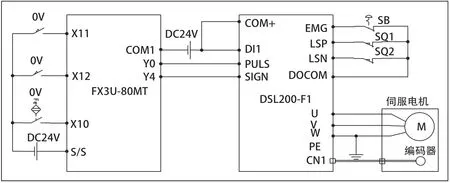
图2 伺服电机PLC控制系统电气原理图
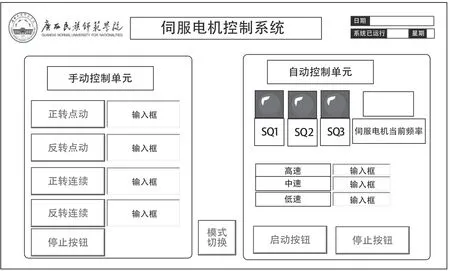
图3 伺服电机控制系统人机界面
本设计采用了三菱PLC的(用FX3U-485BD)与(ΜCGS- TPC7062TI)的触摸屏串行通信,串行通信在传递数据信息时,数据的各个不同位分时使用一根传输线,从低位出发一个接着一位地顺序传递,数据信息中有多少位就必须传递多少次;而串行通信传输速度较慢,但是所需的信号线少,最少二条线就能够完成通讯。这样就能够极大节省成本,也有利于长距离数据传输。要注意在调整好PLC参数后,PLC要马上再次上电,重启后参数才能正式生效。相关参数设置如表2所示。

表2 通用串口设备属性设置参数
ΜCGS触摸屏与三菱PLC通讯线的信号线连接如图4所示。
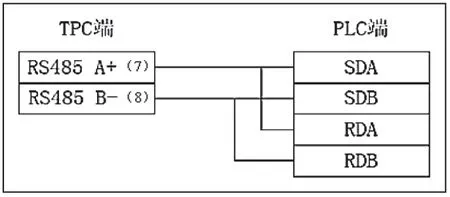
图4 RS485通讯信号线连接
设备属性值的设置如表3所示;触摸屏串口端号必须选择COΜ2,原因如表4所示。

表3 设备属性值的参数设置

表4 触摸屏串口引脚定义表
3.3 PLC主要控制程序设计
3.3.1 原点回归的程序设计
控制伺服电机要明白位置控制的三要素,即位置移动方向(电机转动方向)、位置移动速度(电机转速)、位置移动距离(相对和绝对)。原点回归采用ZRN指令来实现,ZRN指令只能从一个方向回归原点,并且是反转方向,就是当前值计数器的数值减少的方向。三菱PLC指令中D是双重的意思,在做数据处理时,一般是对数据做16位数处理。如果在指令前加“D”,PLC在执行改程序时对数据做32数据处理,同时在处理每步数据时都是占用两个连号的数据寄存器。
当原点回归指令开始运行时,PLC将高速脉冲发送给驱动器,经过驱动器再给到电机,这时候Μ8340置ON,可用于表示正在输出脉冲。电机转动回归原点,带动工作台向左边移动,当移动到原点信号位置时,减速到爬行速度,经过原点信号区后就会停下,所停的位置就是原点位置。
电机速度从0加速到基底速度,基地速度就是初始速度,伺服电机一般为0,步进电机不能为0,否则会发生失步。然后再加速到原点回归速度,触发近点信号后减速到爬行速度。完成指令后Μ8029置ON。
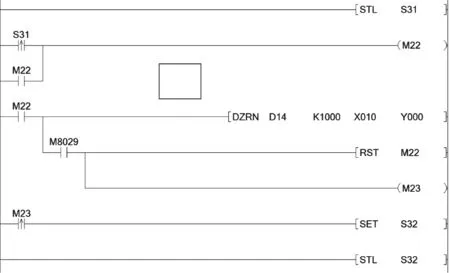
图5 原点回归的程序设计
如果不使用用默认Y4端口来做清零,可以通过程序来更改清零端口。Μ8341置ON表示清零信号有效,可以进行清零。Μ8464置ON表示清零端口可变。D8464存放被指定的清零端口。把一个十六进制数传送进D8464就能进行更改。
3.3.2 多点定位控制的程序设计
多点定位控制采用相对位置指令DRVI来完成,因为16位指令脉冲输出数范围为-32768~+32767,而32位指令脉冲输出范围可达到-999999~+999999,程序设计如图6所示。触摸启动按钮时,以D15的设定速度运行,K99999个脉冲量表示目标位置对于原点位置的距离。Μ8029作为脉冲输出结束信号,可根据任务要求应用到程序上可以大大提高编程效率。编程时可以在Μ8029接通时驱动一个定时器,适当延时让滞留脉冲减少到位范围内伺服电机停止后再去驱动下一条定位指令,以提高定位控制精度。

图6 多点定位部分程序
4 结语
本文只介绍了的伺服电机的位置控制方式(脉冲方式),除此之外还有扭矩控制方式和速度控制模式(模拟电压);根据使用场合来确定合理的控制方式。此伺服电机控制系统适用于控制精度高的场所。三菱FX3U最多可以控制3台伺服电机,增加定位模块最多控制8台;使用三菱运动控制器Q172DSCPU配合三菱伺服驱动器可以实现16台伺服电机的控制。
