一种基于多频率单校准源的水下多元线阵阵形校准方法∗
2022-03-14李光远王文冠
李光远 王 莹 王文冠 吴 迪
(大连测控技术研究所 大连 116013)
1 引言
随着固定式噪声测试技术及装备的不断发展,固定式水下多元阵列逐渐成为了舰船水下噪声测量的重要手段,可为舰船噪声源精确定位及识别提供可靠的平台。然而,对于固定式布放于试验场区的水下多元阵列噪声测试系统,由于阵列规模较大,受布放施工误差及海洋环境(海风、海流、海底地形)的影响,将不可避免地产生布放误差,而阵列的布放误差将直接导致基于理想阵形状态下的噪声源定位识别算法性能急剧下降[1]。一直以来,水下噪声源精细化定位识别的主要手段是采用波达方向估计(Directional of Arrival,DOA)方法[2],实现对噪声源方位的精确分辨,其主要方法为基于特征分解理论的子空间类超分辨算法,典型的如多重信号分类算法[3]、信号参数旋转不变算法[4]等,可初步解决舰船噪声源精细化识别问题。随着相关理论研究的不断深入,研究人员又先后提出了波达方向矩阵算法[5]、加权子空间拟合方法[6~7]等,极大地提升了DOA算法精度。但在实际应用中,上述方法大多基于绝对精确的阵列流形,即各阵元间精确的位置关系。即使阵元位置存在较小偏差,DOA估计方法的性能都可能会急剧下降甚至失效[8],因此,采用有效的措施对阵形进行校准成为了相关领域研究的关键和热点。
目前存在许多阵形估计校准方法,然而由于它们各自的局限性,在实际使用过程中往往效果不佳。传感器直测法可实时、快速校准阵列各阵元位置误差,但此种算法的校准精度受到传感器本身数量和精度的限制,且会导致系统稳定性降低[9],只适合作为大尺度空间阵列的辅助校准手段。基于水声同时基测距定位的阵形校准方法,主要利用水声测距系统,结合基线定位理论,可解算出任意阵元的空间位置坐标,进而实现阵形校准[10]。该方法在实际应用中受海洋声场及测距系统精度影响较大。利用校准源进行阵列校准主要包括有源校准方法和自校准方法[11~12],上述方法可利用多个方位参数已知或未知的校准源信号联合处理,并构建代价函数,进而实现对阵形的在线校准。但在实际应用过程中,用于校准的信号源往往体积较大,在实际应用中移动及操作不便,导致校准效率较低。针对此问题,提出一种基于单校准源的阵形校准方法,该方法将校准源放置在某一特定位置,通过改变校准源信号频率,使信号分别符合远场及近-远场模型,代入对应的代价函数中联合处理,完成阵形校准。仿真结果表明,该算法具有较好的稳健性和较高的估计精度。
2 模型构建
实际应用中,固定式多元线阵是噪声源定位与识别的重要手段,广泛应用于港口警戒、舰船噪声源识别、目标特性获取等相关领域。因此,本文以直线阵列为例构建阵列模型,定义以阵列中首阵元为原点建立坐标系,设定校准源到阵列参考阵元距离为ρ1,与阵列的阵元夹角为θ,阵元数目为N,阵列孔径为为阵列各阵元的笛卡尔坐标,建立信号模型为x(t)=A*s(t)+n(t),当校准源处于近-远场时,信号可看做球面波,有:

这里α为路径损失常量,c为声速。其中:
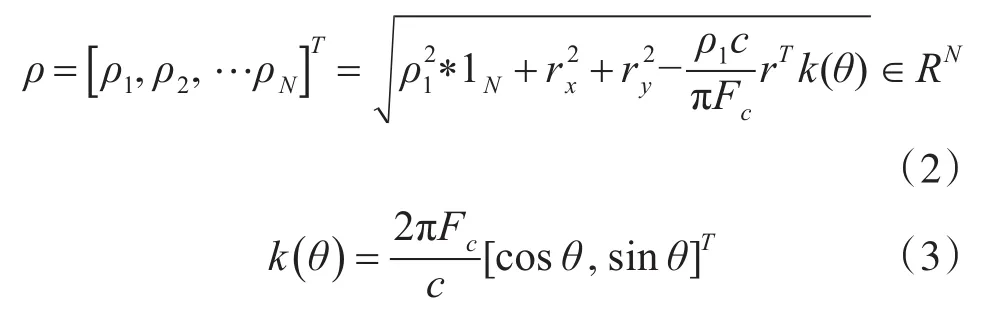

由式(1)~(4)可知,通过调节校准源频率Fc,可使校准源分别处于阵列的远场及近-远场,并建立不同的阵列信号模型,通过对两种模型的联合处理,可实现对阵形位置误差的校准。
对于布放于水下的固定式大尺度空间阵列,各阵元实际位置坐标为:其中为阵列的理论坐标,͂为阵列的位置扰动。阵列实际阵列流形为,来源于已知位置的校准源信号功率为Ps,则协方差矩阵,其中Rnn可看做高斯白噪声的协方差矩阵。已知特征值对应的特征向量可扩展为相同的线性空间,且有:,对于平面波,,对于球面波,有
3 阵形校准方法
考虑到实际布放的多元直线阵列,以首阵元为基准点建立坐标系,校准源与首阵元的距离为ρ1,角度为θ,假设校准源发射信号频率为FC1,使校准源处于系统远场,此时有:
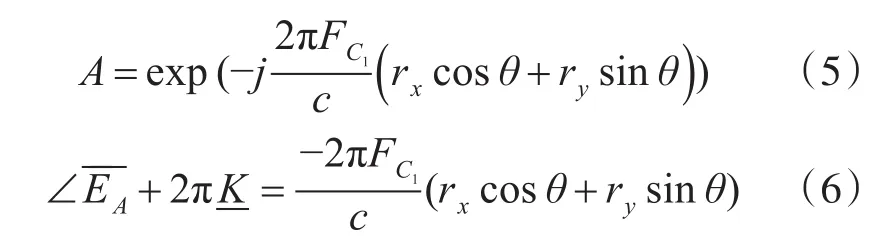

因此,式(6)可写作:

其中rx和ry为阵列各阵元的实际坐标。
接下来保持校准源位置不变,改变校准源发射信号频率为FC2,使校准源符合近-远场模型,信号可看做球面波,其模型符合式(1)。截取信号快拍数为L,有N*L维信号:

以各个阵元分别作为基准点进行运算,可得到N个协方差矩阵如下,其中第i个协方差矩阵,其中,由文献[13]可知:

这里λi为Ri中最大的特征值与其他N-1个特征值的平均数的差值。ρi为校准源到第i个阵元的距离。,可推导出为校准源到各阵元的实际距离。结合(3)可知:

结合(8)、(11),可推导出:

上述推导可得出以下结论:式(12)及(13)可分别得到两个解,其中与理论位置更接近的解可看做校准后阵元的实际位置;该方法需要校准源至少提供两种频率的信号,一种使校准源处于阵列的近-远场,一种使校准源处于阵列的远场。当然,校准源也可以提供更多频率的信号,通过对结果的平均处理,可进一步提升算法的精度。
由上述论述可知,该算法的步骤如下:
1)当信号处于较低频率FC1(此时信号可看做平面波),计算协方差矩阵Rxx和特征向量,再分别计算出K和u;
2)调节信号为较高频率FC2(此时信号可看做球面波),解算出协方差矩阵Ri,并分别找到其对应的特征值λi;
3)利用ρ1解算校准源到各阵元的距离,再进一步解算出v;
4)利用式(12)、(13)解算出rx、ry。
4 仿真试验
利用Matlab对算法进行仿真试验验证,建立阵列模型为9元直线阵列,阵元间距设计为2m,以首阵元为坐标原点建立二维坐标系,并为阵元位置坐标添加随机误差。设置校准源据首阵元距离为800m,校准源与阵列夹角为30°,根据系统远场判别条件,校准源分别发射单频信号,频率分别为FC1=1500Hz,FC2=5000Hz ,声速为c=1500m/s,快拍数L=10000;信号信噪比为20dB,各阵元理论位置坐标为,实际位置坐标分别为[Xi,Yi],校准后位置坐标为遵循上一节中的步骤,利用单校准源校准方法对阵元位置坐标进行校准,校准结果如表1所示。
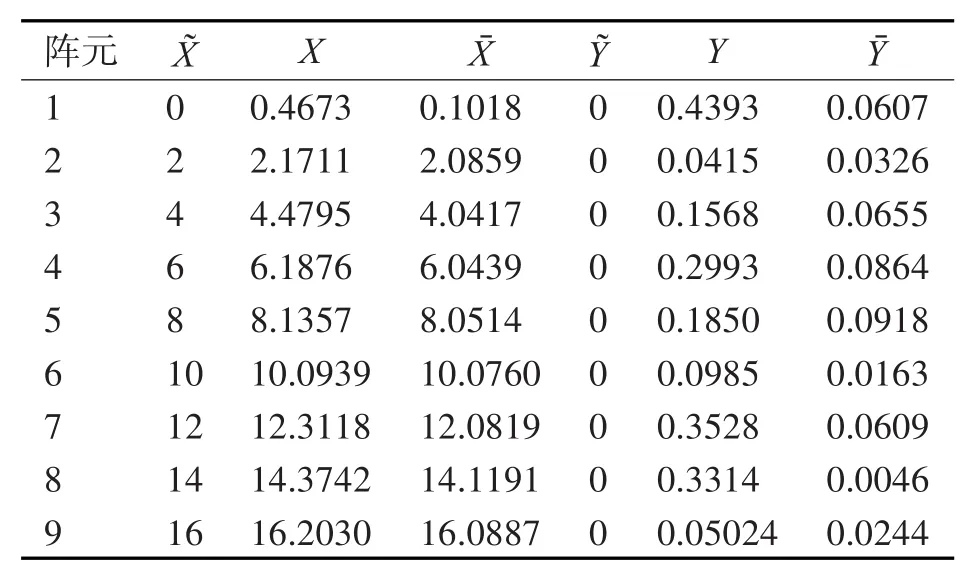
表1 位置误差校准结果
完成对阵列位置误差校准后,利用MUSIC算法,分别对理论阵列、阵形校准前阵列及阵形校准后阵列的DOA估计能力进行分析,假设信号源为3个,角度分别为[-10°,10°,30°]。校准结果如图2所示。
如图1、2所示,利用单校准源误差校准方法,可有效完成对阵列位置坐标的校正,校正后的阵列与校正前的阵列相比,阵列性能大幅提高,证明该方法具有良好的校准精度,同时由于校准源位置不需要改变,可有效提升阵形校准效率。在上述基础上控制信号源分别发射频率为信号,以首阵元为坐标原点,各阵元第一次估计误差分别为,平均后估计误差分别为利用对不同信号组合的平均处理,可得到信号校准精度,平均处理后估计误差如表2及图3所示。结果可知,首次误差校准后,各阵元误差均小于0.12m,X方向平均误差为0.076m,Y方向平均误差为0.049m。平均处理后各阵元误差均小于0.05m,其中X方向平均误差为0.031m,Y方向平均误差为0.025m。由此可见,通过平均处理后,该算法误差估计能力大幅提升。
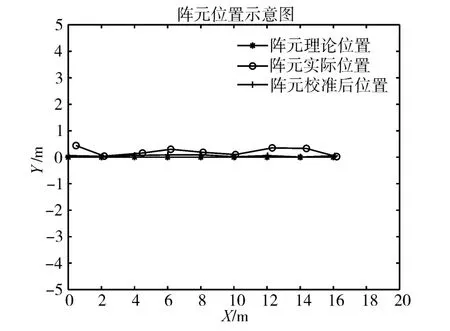
图1 阵元位置示意图

图2 校正前后DOA谱图
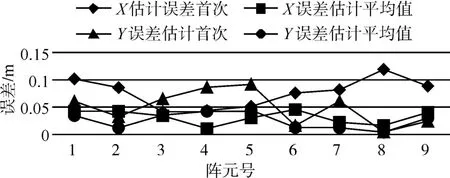
图3 平均处理前后估计误差值

表2 平均处理前后估计误差值
5 结语
本文提出了一种基于单校准源的水下多元阵列阵形校准方法,该方法通过设置位置已知的校准源发射至少两种不同频率的信号,使信号分别满足阵列远场及近远场条件,并建立相应阵列信号模型。经过对代价函数的联合处理,对阵元位置进行校正。通过增加不同频率信号源信号,可有效提高算法估计精度。经Matlab方针仿真验证可知,该方法可有效提升阵形校准效率,并可进一步推广到其它形式的空间阵列,具有较好的应用前景。