基于神经网络的无信号路口人车交通行为预测分析
2022-03-11徐冬冬
王 璐,陈 旸,徐冬冬
(安徽工业大学管理科学与工程学院,安徽 马鞍山 243032)
0 引言
无信号灯路口在城镇的主干道中几乎都有存在,而无信号灯路口的交通情况对于整条道路的交通而言是一个瓶颈。行人在横穿无信号灯路口和机动车辆通过人行道区域时容易形成冲突,这种情况不光对车辆充满危险性,对行人来说其危险则更甚。行人和机动车其通行状态除了速度等运动特征外,由于行人与车辆的通行都具有较高的自由性,因此需要从心理学和博弈的角度对人车路口穿越问题进行研究,设计神经网络预测模型,分析人车行为及运动特征,为无信号灯路口的安全通行管理提供决策依据。
神经网络的基本原理来源于生物领域中动物神经网络,是在网络拓扑的基础上模拟一种类似大脑中神经系统对复杂信息进行反应的整合机制的数学模型。神经网络模型与传统意义上的仿真不同,其具有的自适应学习能力使它更为便捷,并且,由于大部分神经网络模型具有与生物神经系统负反馈调节类似的反馈机制,这也使得神经网络模型拥有更高的容错率。BP神经网络作为目前应用最广泛的神经网络,拥有较强的非线性映射能力、柔性的网络结构、严谨的推导步骤。曹炜[1]深入研究了BP神经网络交通流预测算法,分析了城市干线路口交通流特点,发现BP神经网络的预测效果与路口的环境(本路口与上游路口的配时、交通规则、两路口之间的距离等)密切相关;王军等[2]通过对西安至宝鸡 2 h内268 组数据动态采样,利用分段识别法对模型参数进行估计,建立BP神经网络模型并进行了仿真;凌智[3]通过分析高速路车流量数据特点,对 BP 神经网络预测模型的激励函数进行了改进,确定了预测模型中各参数的初始值的方法,提高了预测结果的精度;季雪美[4]采用BP神经网络进行短时路网交通流预测,结果准确率高;吴艳平[5]等利用遗传算法对各网络层之间的连接权重进行优化,提高了BP神经网络的预测精准度。
本文通过采集行人过街和车辆在人行横道附近区域的交通视频数据,利用Pr、Ae等专业的视频处理软件基于所收集的视频进行原始数据的提取和分类等处理,然后将处理完成的数据输入MATLAB软件并利用BP神经网络进行分类预测。
1 无信号灯路口数据采集
在马鞍山市实地选取几个无信号灯交叉路口作为考虑的视频采集地点,在选择采集地点的时候随机统计路口两分钟内的行人横过马路数量,若行人数量超过或等于5人时,所选无信号灯地点即为合格,可作为视频采集地点。最终选取八个人流量与车流量均较大的无信号灯路口为视频收集地点,依次放置摄像机,采集每天上午8点到下午5点的行人和车辆的通行视频。
1.1 数据提取对象和方法
车辆行驶速度作为一个重要数据,拟定的采集方法有两种,第一种:在距离斑马线30 m、20 m、10 m和0 m处分别放置测速仪测量车速,依据此法可测出车辆在到达距斑马线30 m、20 m、10 m、0 m处的瞬时速度;第二种:在道路两边距离斑马线30 m、20 m、10 m处分别制作标志物,通过视频对行驶车辆进行区间测速,以车头到达标志物的时间作为测速时间点,区间测速原理为Ⅴ=Li/(t2-t1),其中:Li为测速区间的起始标志物到终止标志物的距离;t2为车辆车头到达最终标志物的时间点;t1为车辆车头到达起始标志物的时间点。选择第二种测量方法对车辆在 30~20 m、20~10 m、10~0 m 路段的平均行驶速度进行测量。
行人过街时间为行人通过人行横道的时间。在行人过街的过程中,有一部分行人在对即将到达的车辆进行判断之后,会中断过街行为,此时行人处于等待状态,此种情形下行人的等待时间也计算在过街时间内。
1.2 人车过街分类
输出变量选择人车整体过街类型,本文主要对单车道行人过街进行分类,具体分类根据车辆是否优先通行和行人过街数量进行分类,共分为四类。第一类:单人过街情况下,行人在判断车辆即将到达时,在人行道端点进行等待,车辆优先通过,行人等待;第二类:单个行人过街时,行人判断车辆尚未进入影响本身过街的区域,行人直接通过,车辆等待行人过街后通过;第三类:多个行人过街时,车辆已经距离人行横道较近,且车辆并没有减速的意向,此时行人进行等待,车辆直接通过;第四类:多个行人过街时,车辆距离人行横道较远,行人直接通过,而车辆在人行横道前等待至最后一位行人过街后通过人行道。
在利用BP神经网络对样本数据进行训练和测试时,将过街类型分别用阿拉伯数字1、2、3、4表示,从而使计算机能够理解,以上数据均在视频编辑软件中利用软件的分帧技术进行统计和分类。在收集过程中按照行人和车辆行为对整体过街类型分类,并将过街类型作为输出变量。在对数据进行提取和分析的过程中发现,车辆在距离人行横道较远时,无论行人是否处于等待状态,车辆速度通常都会以较大的速度进行行驶,而行人过街数量与车辆是否进行减速等待并没有高度的相关性。单个行人过街和多个行人过街所需要的时间有较大的区别,多个行人过街时间明显要比单个行人过街要久。
2 BP神经网络模型的构建
根据统计得出的结论,将车辆在30~20 m、20~10 m、10~0 m、30~0 m 的平均速度作为输入变量,同时行人过街时间也作为输入变量之一,而将四类过街类型作为元胞(输出变量),对数据进行BP神经网络的分类预测。
2.1 BP神经网络分类预测模型构建
第一步:数据采集分类时利用Excel整理,在MATLAB编辑栏调用xlsread命令读取数据表格。
第二步:收集数据共453条,筛选后得出440条有效数据,将440条有效数据分为测试集和训练集两组并以3:7的比例进行数据处理。
第三步:对输入和输出数据中由于不同数据之间单位差异、不同车辆状态不同速度、行人和车辆不同速度导致区别的样本数据进行归一化处理。
第四步:构建BP神经网络模型,使用purelin作为传递函数,然后利用newff函数构筑一个可训练前馈网络模型,并且利用梯度下降法对其进行训练。
第五步:设置BP神经网络参数,包括迭代次数、学习速率、最小误差、显示频率、动量因子、最小性能梯度以及最大的失败次数。BP神经网络的训练次数通常情况下选择1 000次,学习率(指训练速度)一般设置是0.1或者0.01,此时BP神经网络在对数据进行处理训练时会发生局部最小状态,此时神经网络的误差基本保持稳定状态,其返回的信号对权值无法产生较大影响,但是总误差结果仍然不满足训练结果设定的总误差条件,故将动量因子设置为0.01使得权值对返回的信号影响产生振荡。
第六步:训练BP神经网络,利用train函数来对神经网络的输入样本和输出样本展开训练。
第七步:训练集训练结束后,开始对测试集进行处理,与训练集的操作相似,在对测试集数据进行测试之前要调用mapminmax函数对测试集样本数据展开归一化处理。
第八步:BP神经网络对测试集展开预测,利用训练集获取的模型对测试集样本展开仿真,并且对仿真后得到的数据展开反归一化处理,利用函数还原到最开始的数量级。
第九步:运用训练好的模型对测试集样本数据进行测试后,计算测试集样本数据分类结果和误差。
第十步:在以上步骤结束后,调用函数对四种过街类型的分类准确率进行统计,同时对测试集样本数据的分类准确率进行统计,最后得出测试集总体分类准确率。
本文建立的BP神经网络分类预测模型包含5种变量输入,8个隐层的神经元,4个输出层的神经元,样本数据的划分方式为随机划分。同时,在模型建立后,利用均方误差来对神经网络的性能进行衡量。其中BP神经网络网络性能参数为2.90、梯度算子为2.53。
2.2 BP神经网络的仿真结果
BP神经网络预测结果见图1,过街分类误差(即预测类别号-实际类别号)见图2。图中横坐标为测试集样本数据顺序,1~33代表第一类所选的测试集样本数据、34~66代表第二类所选的测试集样本数据、67~99为第三类所选的测试集样本数据、100~132为第四类所选的测试集样本数据。由图可以看出,分类准确的测试集样本数据共94个,整体分类准确率为70.1%。第一类和第二类的测试集样本数据的分类误差相对较高,第三类和第四类的测试集样本数据的分类误差较低。

图1 BP神经网络预测结果Fig.1 Prediction results of BP neural network
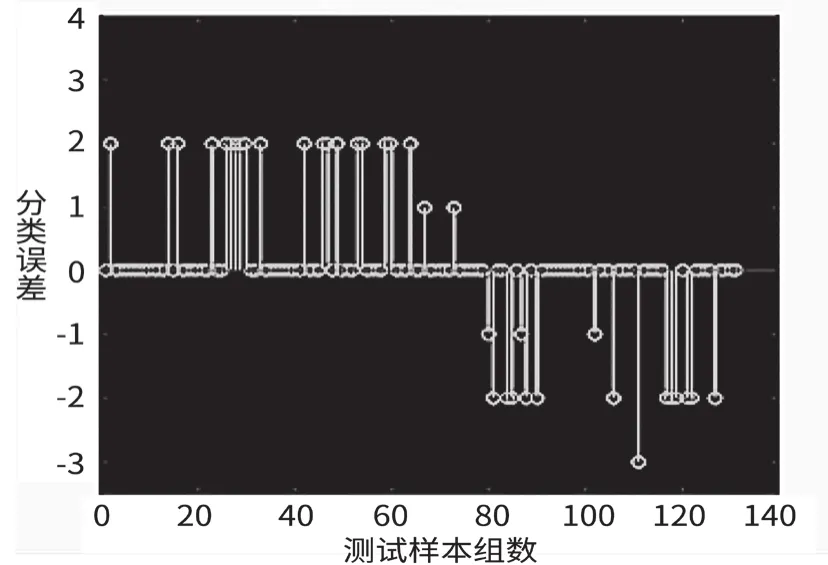
图2 分类误差Fig.2 Classification error
所有数据集(440条有效数据)的误差直方图见图3,可以看出,在训练集的308个样本数据中,超过250个数据的误差处于零误差,说明对神经网络的训练效果较好。

图3 误差直方图Fig.3 Error histogram
3 小结
本文对行人和机动车辆整体的四类交通行为进行分析后,通过MATLAB构建神经网络模型,将单车道的车辆在距离人行横道30~0 m的每10 m路段的平均速度和30 m路段的平均速度以及行人过街时间作为输入变量,而将四种过街类型作为输出变量,在神经网络中进行仿真分析,最终分类准确率约为70.1%。
当行人等待车辆通过时,车辆行为基本一致,而当车辆等待行人通过时,单个行人过街与多个行人过街的交通行为均有不同。究其原因,可能是行人过街时的交通行为有极高的随意性,每个行人的过街行为均有不同程度的差异,而机动车驾驶员长期在道路上行驶,大多数的交通行为有较高的相似性。本文在研究中发现存在一种危险情形,即当行人已经进入人行道与车辆行驶道路的交叉区域时,车辆并未采取减速措施,而是以匀速或加速的行驶状态通过干扰区域,以限速60 km的路段为例,车辆通过干扰区域时间约为2 s,行人将在车道区域停驻2 s以上才可通行,这对于本就处于交通劣势的行人而言无疑提高了危险性。因此,在交叉路口,尤其是无信号灯路口这些人车交互的交通区域,除了加强对于交通规则的宣传外,无论是车辆抑或是行人,都应以稳为重,互相礼让,以避免交通事故的发生。
