基于FPGA的垂直循环式立体车库智能测控系统
2022-03-11史伟
史 伟
安徽理工大学机械工程学院 淮南 232000
0 引言
随着近年来经济的持续发展,我国人均汽车拥有量逐渐增大,需要的停车数量逐年增加[1]。相比于地面停车场,立体车库能够充分利用地面以上空间,有占地面积小、结构简单、制造成本低、操作方便、安全性高等优点,立体停车设备可以有效解决人们生活中停车问题[2]。随着人工智能技术的不断进步,停车设备采用人们习惯的二维码支付方式[3]。通过安装在车库底部的射频识别(RFID)装置与每个车位上的电子标签之间的信息交互,控制系统可以识别不同车位[4]。上位机监控系统软件使用C#语言编写[5]。FPGA在下位机的程序运行上具有多线程并行处理的优点,通信能力好并且抗干扰能力强。由于LabVIEW开发FPGA相比于利用VHDL语言或Verilog语言进行代码编写FPGA开发模式更加易于编程[6],故采用LabVIEW for FPGA工具开发垂直循环式立体车库控制系统。
1 测控系统总体设计
本文所述立体车库采用FPGA作为核心控制器[7],控制系统硬件连接图如图1所示。控制系统除了实现用户自动存取车外,还要保证自动收取停车费、可视化管理、车辆入库管理等。控制系统智能化是立体停车设备未来发展趋势,应考虑提高控制系统智能化程度。
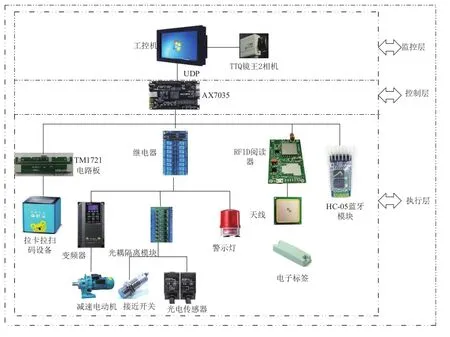
图1 控制系统硬件图
1.1 硬件组成
垂直循环式立体车库的硬件部分由上位机工业触摸屏、TTQ甜甜圈相机、黑金AX7035开发板、拉卡拉收款设备、台达变频器CH200、三相交流减速电动机、报警装置、16路继电器、传感器等组成。
1.2 测控系统工作原理
立体车库根据设定的程序进行判断,进而控制车库旋转、自动收款等功能。控制程序主要由车库旋转控制、停车费收款和读车位号子程序组成。另外还有初始化、安全防护检测等功能,如通过光电传感器判断车位是否有车,通过监控设备判断车库安全与否等。控制系统程序运行流程如图2所示。

图2 控制系统程序运行流程图
2 车库旋转控制
控制系统在设计时,FPGA通过继电器控制变频器正转(FWD)、反转(REV)与公共端(DCM)的连接控制立体车库旋转。用户在取车时,启动车库旋转,之后自动将一个空闲车位旋转至车库底层,以供下一个用户存车。
2.1 停车位编号与识别
串口通信是一种总线通讯方式,收发相互独立,可以同时进行,收发双方按照约定的波特率可以完成数据的相互传输。FPGA的运行频率高,可以通过时钟软件分频的方式实现不同的波特率。由于FPGA芯片内部没有串口收发器,于是在FPGA内部模拟串口收发器协议,外部加一个电平转换芯片可以实现串口通讯[8]。
车库车位识别原理为:12个规格相同但内部载有不同数据的电子标签安装在12个车位上,RFID装置安装在车库底部横梁上,每个车位转到底部时与RFID装置形成扫描区,在这个区域内的电子标签都可以被射频识别装置扫描到[9]。FPGA开发板自定义串口收发引脚与外接的RFID装置的收发引脚连接,在用户存取车时,射频识别装置由FPGA发送读标签命令,在扫描区范围内的标签把自身数据发送给RFID装置,数据由自定义串口缓冲传给FPGA开发板自身的标准串口线程缓冲,从而传给FPGA。数据经FPGA反馈至监控系统再进行处理。FPGA与RFID串口通信线程如图3所示。

图3 FPGA与RFID串口通讯程序
2.2 载车板停放到位检测
在控制系统中,接近开关安装在载车库入口的悬梁上。当载车板经过或到达车库底部时,通过提升链板触发悬梁上的接近开关,触发数目由PFGA采集,程序框图如图4所示。当FPGA采集的触发数目与工控机内部计算的对应车位旋转至底部数目相等时,车库转动结束,通过这种方式实现对车库旋转的准确控制。
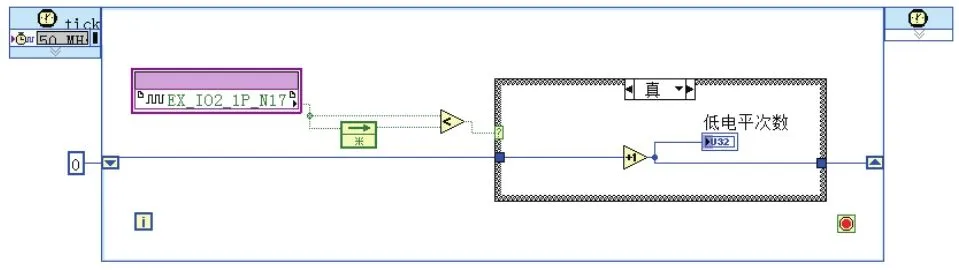
图4 接近开关计数程序框图
2.3 车库旋转控制工作原理
在立体车库控制系统中,上位机监控系统通过千兆以太网,经过串口转以太网模块传输命令给FPGA,下位机FPGA经过继电器控制变频器的通断,通过这种方式实现车库的旋转方向和启停操控,程序框图如图5所示[10]。
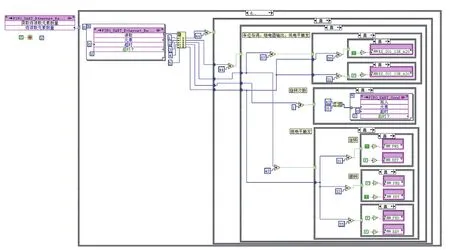
图5 FPGA控制变频器的控制端子通断程序
3 停车费支付功能设计与实现
为实现本立体车库智能控制系统的要求,用户只需在扫码终端扫码范围内出示付款码,即可自动支付车费。扫码收款终端有22个按键,是指令和数据的输入装置,TM1721电路板如图6所示。

图6 TM1721电路板
停车费用由上位机监控系统根据用户存车时间与系统内取车时间进行做差乘以每分钟费用获得,费用通过以太网线经过串口转以太网模块传输给FPGA,模拟人工手动输入费用给收款矩阵键盘。客户成功支付停车费用后,此时车库开始旋转,将对应车位旋转到底部,用户进入车库取走车辆。FPGA模拟人工输入收款金额百位数字程序框图如图7所示。
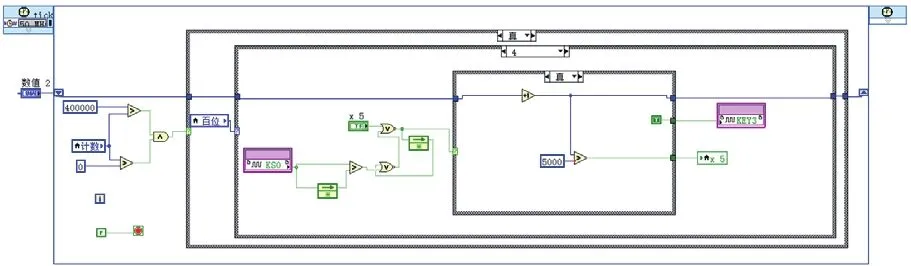
图7 FPGA输入收款金额百位数字程序
4 车库安全防护设计
为了提高控制系统安全性和稳定性,在车库内设置光电传感器,FPGA检测到车库内有异常时,经设定的程序逻辑判断后控制车库立即停止运转并通过声光报警器警示用户车库处于危险状态。光电传感器检测车库内安全环境程序如图8所示。该立体车库控制系统车库入口处布置地磁传感器[11],当用户存车入库时,车辆本身作用引起车库周围磁场变化,该变化被地磁传感器采集,通过传输给FPGA进而控制车库闸门的开启和关闭。
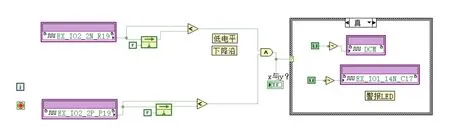
图8 车库安全环境检测
5 车库上位机监控系统软件设计
在上位机界面设计中,设置12个控件用于显示用户存车时的照片,当某一车位空时会显示默认照片,并在控件下面设置对应的取车按钮。用户界面有存取车按钮和显示车辆照片窗口,如图9所示。

图9 普通用户界面
用户在工业触摸屏界面点存车按钮时,启动摄像头拍照,照片通过USB线传输到上位机进行保存,方便用户取车时确认自己的车位。
6 控制系统测试
6.1 实验室模拟
测试包括控制系统的可行性和可靠性试验,包括对硬件和软件的安装以及功能验证[12],对实际立体车库的正常运转有着重要的作用。实验室模拟的控制系统如图10所示。
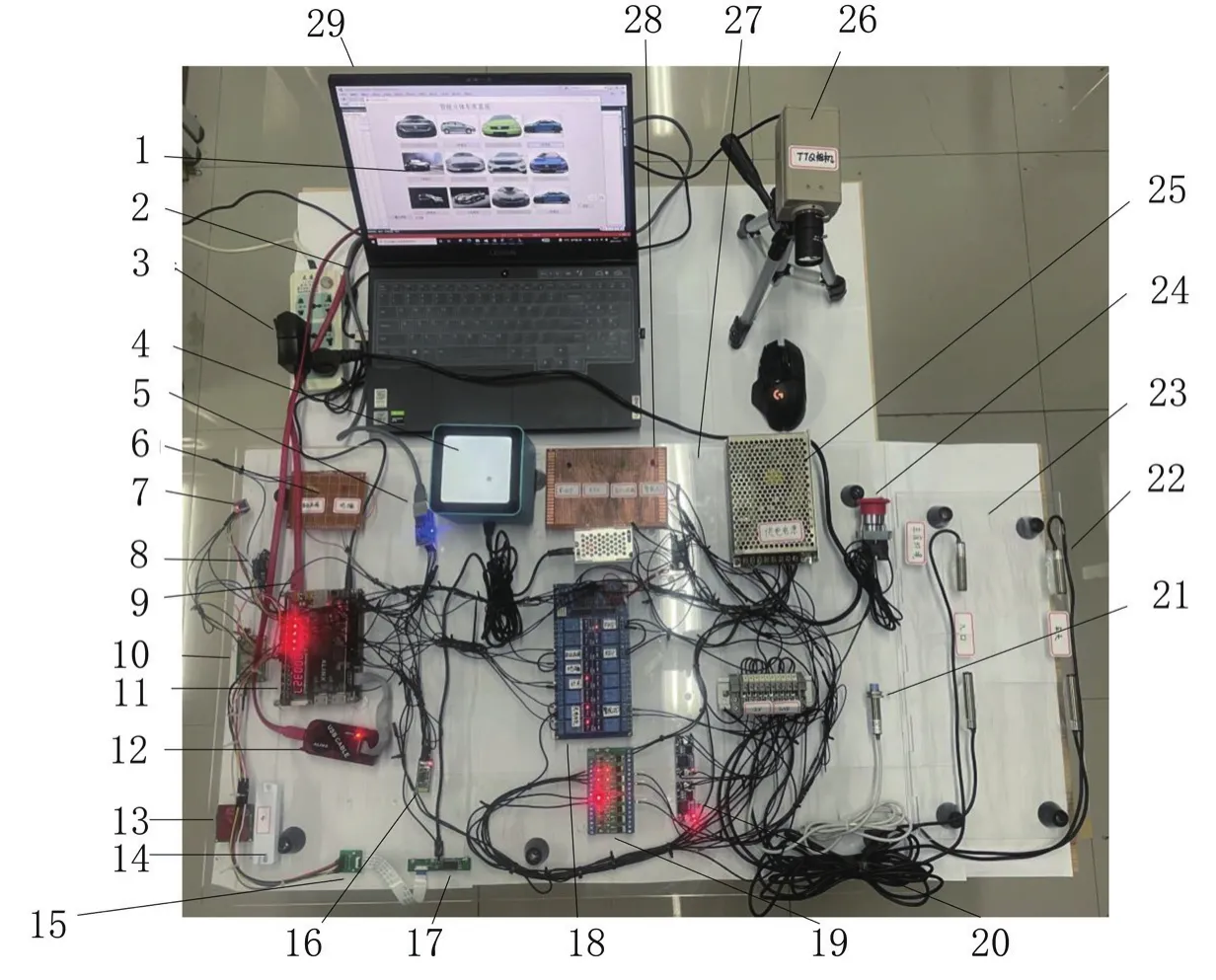
图10 模拟的控制系统
6.2 现场联调
1)停车位编号准确识别 实际测试时,电磁波和车库自身的钢材质之间有反射作用,导致射频识别的距离小于3 cm。将普通标签替换成抵抗金属干扰的被动式智能标签,通过现场联调,射频识别的长度增加到10 cm,满足实际使用要求。识别距离测量如图11所示。

图11 识别距离测量
2)车位异常检测和初始化 车库实际运转中,如果异常断电,车库中的车位可能会停错位置。为了将车位断电情况下归正,在工控机人机交互界面设置车库初始化、正方向转动一次、反方向转动一次按钮,管理员界面如图12所示。当车库在异常情况下时,添加手动操作车库功能,方便车库调试。

图12 管理员监视界面
7 结语
本文设计的垂直循环式立体车库智能测控系统,采用FPGA作为主控芯片实现硬件功能,用C#语言实现上位机软件设计。LabVIEW for FPGA软件具有同时处理多线程的功能,立体车库控制系统的智能化与自动化水平得到显著提升。通过分析论证和实物联调验证,满足使用场景要求。
