基于深度学习的滚动轴承早期故障诊断策略
2022-03-09袁媛
袁媛
(包头职业技术学院,内蒙 古包头 014035)
随着大数据世代发展,产业技术不断升级。人工智能在各行业得到普遍应用,深度学习在图像识别、语言合成等领域迅速推广。机械故障诊断主要对机械振动信号分析处理,深度学习相比传统机械故障诊断方法更加高效,研究深度学习在机械故障诊断中的应用,对提高滚动轴承设备运行稳定性具有重要价值。
1 基于1D-CNN+LSTM 滚动轴承故障诊断
滚轴故障诊断研究不断发展,传统故障诊断方法包括基于机器学习方法,面对复杂问题进行故障识别会存在一些缺陷,利用统计学法难以建立准确数学模型,需要研究人员掌握大量相关经验,在故障诊断应用方面受到很大局限。基于机器学习的故障诊断法包括BP 神经网络等。SVM 面对复杂场景训练数据性能表现不理想,神经网络存在过度拟合,计算努力受限等问题[1]。针对滚轴故障诊断是研究热点,科技发展为诊断技术提供新丰富。深度学习理论源于神经网络,组合低维投影表示较高感知水平,广泛应用于图像处理等领域。滚轴故障诊断流程见图1。

图1 滚动轴承故障诊断流程图
深度学习模型可自主逐层学习深层非线性特征表示,卷积神经网络卷积模块可以从高维原始数据提取特征,实现对滚动轴承故障诊断。故障振动信号分析内不时间依赖可以提升诊断准确率,长短时记忆网络处理分析时序数据具有独特优势,提出结合CNN 特征提取模型改进滚轴故障诊断模型,提取数据高阶特征表示,连接LSTM 利用记忆模块挖掘数据隐藏时间依赖性,设计一维CNN 结构,采用ReLU 激活函数对CNN 卷积操作增加非线性表达能力,采用Adam 算法改进参数优化问题[2]。CNN 每层级计算方式是为当前输入加上权重,线性网络无法拟合复杂数学函数,激活函数使用是训练深度学习模型重要环节,使网络模型具备非线性拟合能力。常用激活函数包括Tanh,Swish 等。Swish 激活函数训练深层网络具有优势,选用ReLU 为激活函数具有较高准确率。
输入数据通过网络训练得到结果对比实际存在误差值,通过优化算法反向传播更新网络权重,给出常用优化算法包括随机梯度下降法,自适应矩估计优化算法。梯度下降法广泛应用于机器学习优化问题中,梯度下降法易于实现,但面临样本量过多时迭代计算全部样本梯度,降低函数收敛速度。随机梯度下降迭代中随机选择样本求解梯度,迭代中选用一个样本,优化算法在更新参数中使用唯一确定学习率。计算公式为θ′=θ-αΔfi(θ),i 为迭代随机选择样本,θ 为每次迭代后参数值,f()为损失函数。本文使用Adam 算法对网络反向传播进行参数更新。特征提取影响最终分类结果,CNN 具有提取多维数据能力,一维CNN 网络结构简单,结合1D-CNN 与LSTM 构建新滚轴故障诊断模型,通过LSTM 挖掘故障特征时间信息。通过滚轴振动数据验证提出诊断方法,实验测试平台包括扭矩传感器,内部设置电子控制器[3]。
从测试台驱动端收集轴承SKF6205 产生内外圈故障健康状态振动数据,设定适合样本对神经网络训练非常重要,网络训练中样本包含滚轴振动数据采样点,样本选取较短长度有效信息变少,样本选取较长长度会增加训练时间成本。卷基层卷积核尺寸较小,样本过大需大量卷积核完成卷积操作,卷积核尺寸较大难以准确提取深层故障。表1 为1D-CNN+LSTM 相关参数设置。轴承采样频率为12kHz,每转包含400 个采样点,将800 个采样点划分为样本数据,达到较快收敛效果。训练深度神经网络要提供大量训练样本,轴承振动信号故障特征随时间变化表现不同冲击,需设定合适重叠比例对信号数据分段处理,选取重叠比例为1/2,样本数据集按4:1 划分。图2 为1D-CNN+LSTM 故障诊断流程图。

表1 1D-CNN+LSTM 相关参数设置
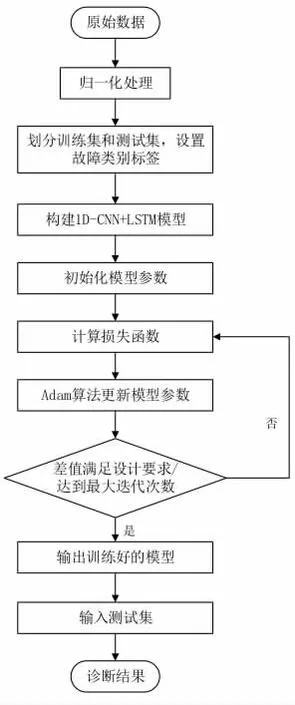
图2 基于1D-CNN+LSTM 故障诊断流程图
根据网络模型调整,对反向优化算法验证。激活函数是训练深度网络模型关键部分,Sigmoid 函数是焦躁使用激活函数,将RELU 与Swish 激活函数对比,连续卷积与池化实现信号数据深层故障提取,连续全连接层与Softmax 层输出结果。CNN 中设置激活函数为RELU,设置为Swish 准确率为97%。使用RELU 的CNN 法准确率高出Swish 方法0.84%。训练迭代较少次数达到更快收敛。图3 为基于不同深度学习方法滚轴故障诊断方法准确率对比图。1D-CNN+LSTM 诊断法在初始迭代中有较高准确率,最终准确率达到98%。CNN 诊断法维持在95%,LSTM 诊断法达到96%的诊断准确率。1D-CNN+LSTM 故障诊断法具有较高准确率。不同诊断方法准确率见表2。

表2 不同诊断方法准确率

图3 基于不同深度学习方法的滚轴故障诊断方法准确率对比图
2 基于D-S 证据理论的滚轴故障诊断法
特征提取影响设备故障诊断系统准确率,机械设备特征提取困难,单一传感器采集故障信息存在模糊性等特点,无法全面反映监测设备故障情况。通过测量旋转机器不同信号,多传感器采集系统可提供丰富轴承健康状况信息。多源信息融合可以全面捕获故障数据内部包含特征信息,获得准确的诊断结果。可以在故障诊断系统不同步骤进行信息融合,要对输入原始故障信号进行数据级别融合,对多个数据源信号特征提取后进行综合故障诊断分析。深度学习法解决设备故障诊断是当前研究热点,网络模型中可以连接分类器分类识别特征。
1967 年Dempster 构建多值映射集合不确定描述,Shafer扩充下限概率模型理论,1976 年形成D-S 证据理论。D-S 证据理论将任务命题不确定程度通过集合形式展现,通过合成规则融合命题可能性,可以处理不同数据来源不确定信息,在多源信息融合领域广泛应用。D-S 证据理论针对数据不确定性有定量描述,故障数据受运行状态影响表现为不全面性,1D-CNN+LSTM 故障诊断法操作包括初步诊断与融合决策故障诊断阶段。故障诊断法着重完成决策级证据融合故障诊断。根据滚轴故障形式设为轻中重度内外圈故障,定义故障集合为D-S 证据理论识别框架,根据Softmax 分类器输出结果为证据,表示待识别特征与故障匹配度。多个证据对应信任度m(Ai)确定后,得出融合多源数据信息不同故障信任度。不确定性描述待识别特征为Ai 类故障不确定度。图4 为基于D-S 证据理论的1D-CNN+LSTM 故障诊断流程图。

图4 基于D-S 证据理论的1D-CNN+LSTM 故障诊断流程图
Dempster 合成规则含有交换律,数学表达式为{m1⊕m2=m2⊕m1,m1⊕m2⊕m3=(m1⊕m2)+m3,Dempster 合成规则具备极化性质,表明证据合成后可弥补单源数据随机性。多个mass 函数正交,对信任结论信任结论不确定度小。设mi(Θ)为单源不确定性,数学描述公式a)∃i∈{1,2,…,n},mi(Θ)=0→m(Θ)=0。利用证据理论对不同传感器故障信号融合得到概率分配BPA,提出方法基于可信度分配判别标准分类决策。提出方法认为判别滚轴故障信任概率不低于门限值。选取CWRU 提供电机基座端不同损伤度振动加速度故障数据集为原始输入数据,数据样本分为轻中重度内外圈滚动体故障,没类故障包含1797r/min,1730r/min 转速振动信号采集。电机振动信号采样频率为12kHz,选取故障类别数据中250样本2500 个样本数据,传入3 个1D-CNN+LSTM 诊断子网络模型初步诊断分类,实现决策级融合诊断。
实验将选取测试结果为故障诊断结果,将CWRU 数据源输入并列的1D-CNN+LSTM 诊断子网络初步特特征提取,训练深度学习网络对原始振动信号处理。深度学习诊断子网络初步诊断后,不同数据源表征故障存在偏差。根据合成步骤对网络输出结果融合分析,由于数据源不同存在矛盾数据,网络1 中故障类型为O1,诊断结果为B2。综合分析网络故障模式表征,经过D-S 证据理论融合诊断准确率达99.99%。基于1D-CNN+LSTM 神经网络故障诊断中,构建相互独立故障诊断子网络具有独特优势。图5 为其他模型与WT-DSCNN 准确率和参数量对比图。利用D-S 证据理论对初步诊断子网络结果融合分析,综合考量自诊断网络识别准确度,保证合成诊断保持鲁棒性。

图5 其他模型和WT-DSCNN 准确率和参数量对比图
为验证提出方法有效性,设置对比实验,MF-FC 是多个fire 模块构成,F-GAP 是单个fire 模块与GAP 构成。F-FC 是单个fire 模块与FC 构成,CNN-GAP 是卷积层-GAP 层组成。CNN-FC 是卷积层-FC 构成。全连接网络模型参数众多,使用t-SNE 对结果可视化研究。WT-DSCNN 易于区分故障状态类别样本。CNN-GAG 在不同故障类型深度不能很好的区分。WT-DSCNN 是参数个数最少的网络,可实现高速监测设备运行状态。
