基于B2B-MMC的柔性互联变电站改进型孤岛控制模式
2022-03-08张腊华邹晓松袁旭峰熊炜郑华俊班国邦杨荣
张腊华,邹晓松,袁旭峰,熊炜,郑华俊,班国邦,杨荣
(1. 贵州大学电气工程学院,贵阳550025;2. 贵州电网有限公司电力科学研究院,贵阳550002)
0 引言
随着柔性互联技术在配电网中的应用不断提升,配电网对电能质量、供电可靠性和系统稳定性的要求越来越高[1 - 4]。然而当主变压器(简称主变)或馈线故障失去电源后,柔性互联装置需要迅速切换至孤岛控制模式对失电区域的敏感负荷进行转供,而换流器不同运行模式之间的相互切换将引发复杂的暂态调整过程,给系统带来诸多危害,因此实现换流器运行模式的平滑切换对提升系统稳定运行和供电可靠性至关重要[5 - 8]。
在利用柔性互联技术改善配电网性能方面,最早由英国帝国理工学院学者提出的智能软开关(soft open point,SOP)概念,该技术既可以实现对功率传输的独立控制,又能对无源系统进行转供[9 - 10]。对于柔性互联配电网而言,其主要包括4种控制模式:①定直流电压-无功功率控制(Udc/Q);②定有功、无功功率控制模式(P/Q);③下垂控制模式(PUdc/Q);④孤岛控制模式(V/f)[11 - 15]。通常采用①+②控制模式,若发生故障失电,需要将功率控制模式切换到V/f控制模式,实现对孤岛模式的切换。然而P/Q控制作为一种给定有功和无功功率控制,使得换流器按照给定值输出,P/Q控制的控制目标仅限于受控侧的功率需求,然而系统侧的频率、电压幅值仍然需外部支撑,因此P/Q控制仅限于与系统相连进行功率传输,无法在离网工况下维持系统正常运行,V/f控制虽弥补了P/Q控制的不足之处,但该控制对功率的控制能力较弱,系统功率波动难以实现快速有效控制。
柔性互联配电网必须具备故障自愈的能力,而孤岛控制是实现故障自愈的技术前提,孤岛控制的切换技术是提高电能质量和供电可靠性的关键。文献[16]提出一种通用型联网与孤岛共存的控制策略,将换流器频率指令值的偏差控制通过交流系统有功功率-频率和换流器有功功率-直流电压的下垂系数进行控制,从而配合交流系统一次、二次调频,实现了换流器两种模式的平滑切换。文献[17]提出了柔性互联多微网之间的协调控制,将改进型下垂控制应用到多个微电网孤岛控制模式下,实现了多微网孤岛运行工况下功率波动就地平抑,提高了多微网运行的供电可靠性。文献[18]提出了基于多目标模糊优化的配电网柔性互联装置运行配置,提高了柔性互联配网运行的供电可靠性。文献[19]提出了一种新的虚拟同步发电机控制结构,该控制虚拟发电机基础上加入抗干扰状态转移控制对控制器提供一个补偿回路,实现了并网运行模式平稳过渡到孤岛运行模式,该控制也不依赖于孤岛检测环节。文献[20]分析了三端口SOP并网与离网工况下的数学模式,提出一种基于控制器状态跟踪的下垂控制方法,实现了换流器控制模式之间的平滑切换。
综上所述,换流站控制的差异性决定了控制器从P/Q模式切换到V/f控制模式时,控制系统会发生较大变化,进而引发过电压、过电流现象,若采取措施不及时将引起保护误动作、换流器过流闭锁,系统停运等问题,为有效解决以上问题,本文提出一种改进型孤岛控制模式,将有功功率-直流电压平方分配特性的固定下垂系数与利用虚拟惯量的自适应惯性下垂系数相结合,实现了孤岛控制模式下同时兼顾功率控制与系统频率的稳定,最后,通过 PSCAD/EMTDC 暂态仿真软件对所提控制策略进行仿真,验证了本文所提方法的有效性和合理性。
1 系统拓扑结构及B2B-MMC控制策略
本文针对传统配电网110 kV/10 kV双主变系统采用背靠背模块化多电平换流器(back-to-back modular multilevel converter, B2B-MMC)替代传统分段开关,换流器从P/Q模式切换到V/f控制模式的研究,该系统拓扑结构示意图如图1所示。协调控制两端MMC是保障柔性互联系统稳定运行的关键。B2B-MMC投入运行时断路器QFd、 分段开关QSd处于断开状态,将变电站内负荷等效为负载1、负载2。
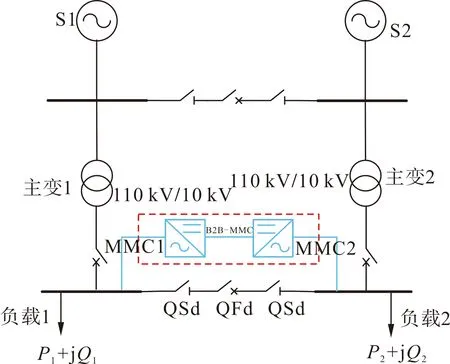
图1 柔性互联变电站模型
对于每个换流站而言,换流站的外环控制需固定两个控制自由度,包括一个有功类控制和一个无功类控制,其结构如图2所示。当B2B-MMC工作在主从控制模式下,当与换流器从站相连的主变发生故障并退出运行后,该侧换流器需要切换至图3所示的孤岛控制模式,进而为交流系统的负荷提供电源保障失电侧交流系统电压和频率的稳定[21 - 22]。通常采用硬切换的方式,然而换流站控制的差异性决定了切换过程中存在不可避免的暂态过程。
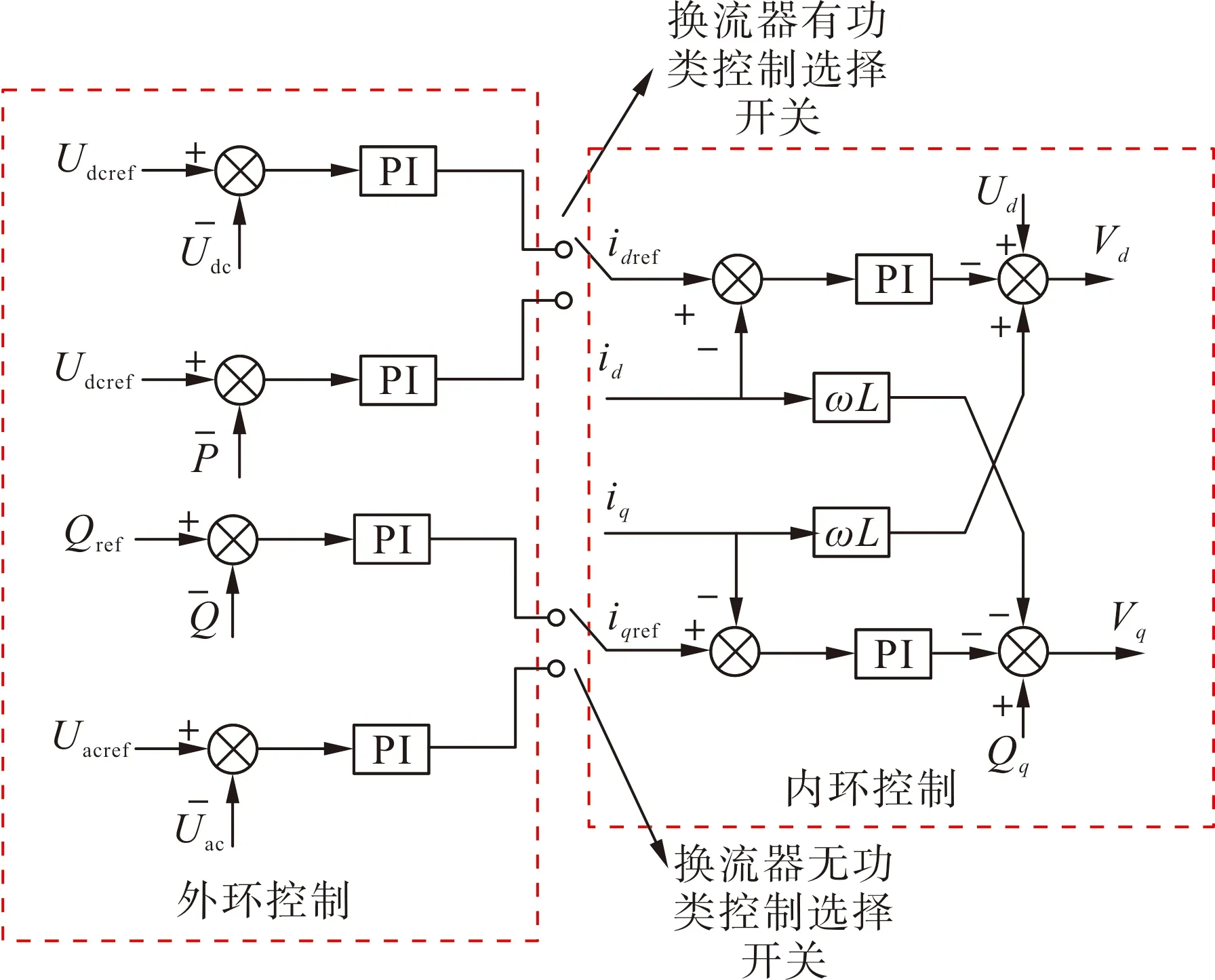
图2 B2B-MMC系统控制框图
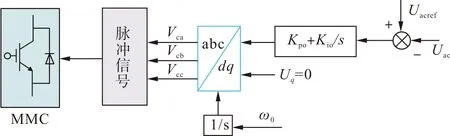
图3 B2B-MMC孤岛控制框图
2 B2B-MMC的改进型孤岛控制模式
本文提出一种改进型孤岛控制模式,该控制策略可以避免换流器切换为孤岛控制模式时产生的过压、过流现象,提高系统可靠性,其主要是将有功功率-电压平方分配特性的固定下垂系数与利用虚拟惯量的自适应惯性下垂系数相结合,具体如下:
(1)
式中:ω和ω0分别为交流系统的额定角速度和实际角速度;Pref和P分别为有功功率参考值和额定值;Udcref和Udc分别为直流电压参考值和额定值;Kpp和Kip分别为B2B-MMC输出功率值的PI调节器参数;Kdc和Kf分别为有功功率-直流电压平方分配特性的下垂系数和基于虚拟惯量的自适应惯性下垂系数。
2.1 换流器有功功率-电压平方下垂系数
模块化多电平换流器拓扑结构如图4所示,图中,R0、L0为MMC的j(j=a,b,c)相上、下桥臂等值损耗电阻和电感,Rs、Ls为交流网侧滤波电阻和滤波电感,CSM为全桥子模块储能电容,upj、ipj、unj、inj分别为上、下桥臂电压和电流。Usj为交流端口电网电压。进一步分析了MMC直流侧电压与MMC桥臂功率之间的关系,其原理介绍如下。
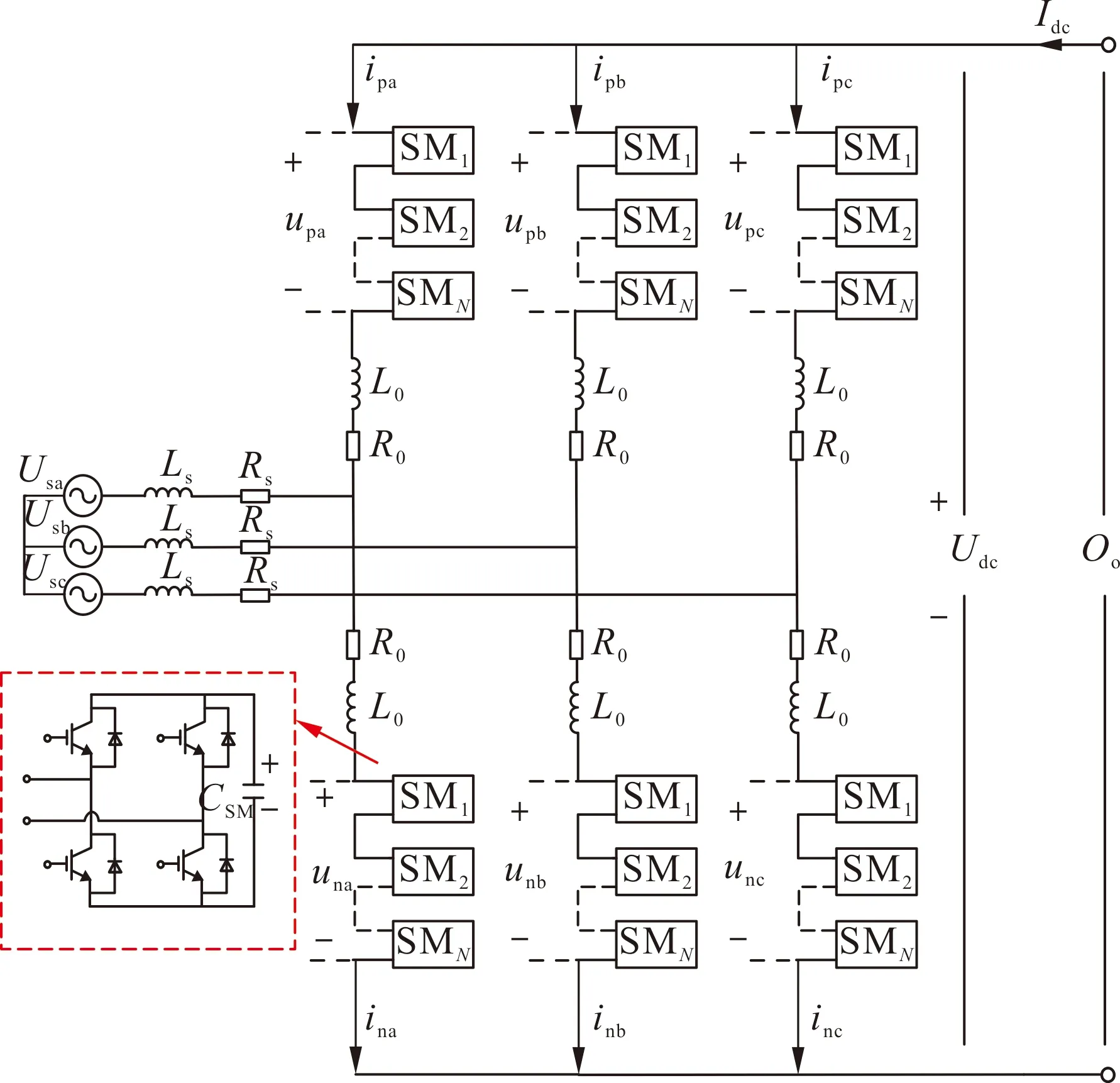
图4 MMC拓扑结构图
MMC的第j相桥臂瞬时功率可表示为:
Pj=upjipj+unjinj
(2)
MMC上、下桥臂电压和电流表达式为:
(3)
(4)
式中:∑upj_CSM(t)、 ∑unj_CSM(t)分别为MMC第j相上、下桥臂全桥子模块电容电压,np(t)、nn(t)分别为上、下桥臂的全桥子模块开关函数。开关函数表达式如式(5)所示。
(5)
将式(3)—(4)代入式(2)可得:
(6)
当系统运行时,MMC桥臂电压中存在二倍频分量,即:
(7)
式中Δuj2f为二倍频分量。
将式(7)代入式(6)得:
(8)
由于二倍频分量较小,可以将其忽略,进而得到换流器桥臂瞬时功率如下:
(9)

在模式切换过程中,由于换流器有功功率出力激增,造成B2B-MMC直流侧电压产生较大波动进而影响系统的稳定运行,因此应选取合适的有功功率-电压平方下垂系数Kdc, 使得直流侧电压波动较小,提高系统运行可靠性。
2.2 自适应惯性下垂系数
基于有功功率-电压平方的下垂系数Kdc可以根据B2B-MMC的功率波动来合理调整换流器输出功率,然而当系统从P/Q模式切换到V/f控制模式过程中出现严重的功率不平衡导致系统频率偏移稳定值,仅依靠有功功率-电压平方的下垂系数Kdc控制将难以保障系统频率稳定,为有效支撑系统频率,引入了虚拟同步发电机控制[23 - 25]。进而将同步发电机转子运行方程和B2B-MMC直流侧有功功率进行耦合,模拟同步发电机有功功率-频率控制以实现交流系统频率的动态支撑,其中同步发电机的转子运动方程具体如式(10)所示。
(10)
式中:H为同步发电机的惯性系数;f0和f分别为系统频率额定值和实际值;Pm和Pe分别为同步发电机的机械功率和电磁功率;ΔP1为同步发电机转子上存储或释放的旋转动能。
在模式切换过程中换流器的功率失衡,交流系统的频率将会相应地改变,该不平衡量将由同步发电机转子上存储或释放的旋转动能来补偿,从而恢复换流器的功率平衡以及交流系统频率的稳定。
对于B2B-MMC而言,换流器直流侧等效电压-功率特性和同步发电机转子运行方程特性相似。换流器直流侧等效电压-功率特性动态方程具体如式(11)所示。
(11)
式中:C为直流侧总电容值;Pin和Pout分别为换流器输入功率和输出功率;ΔP2为直流侧电容存储或释放的功率。
为建立换流器直流侧电压与交流系统频率的耦合关系,联立式(10)和式(11)可得:
(12)
对式(12)两端进行定积分可得:
(13)
(14)
(15)
对式(15)进行改写可得有功功率-电压平方的下垂控制方程具体如下。
(16)
(17)
由式(16)—(17)可以看出,交流系统频率变化时下垂系数Kf能够自动调整,实现自适应控制。当系统从P/Q模式切换到V/f控制模式过程中,交流系统频率变化越大,自适应下垂系数越大,减少交流系统的频率波动,从而使换流器直流侧不平衡功率在交流系统侧得到合理的分配,抑制换流器模式切换过程中的电压、电流冲击。
自适应惯性下垂系数为一变量,具体变化根据频率偏差、直流侧的总电容值等参数有关,理论计算得到自适应惯性下垂系数波动范围为0.05~0.16,在仿真模型中测量出的自适应惯性下垂系数变化区间为0.07~0.19,理论计算值和仿真模型中的计算值波动范围不大,本方法根据实际模型的不同计算的下垂系数也有差异性。
综上,本文所提出一种改进型孤岛控制模式整体控制框图如图5所示。
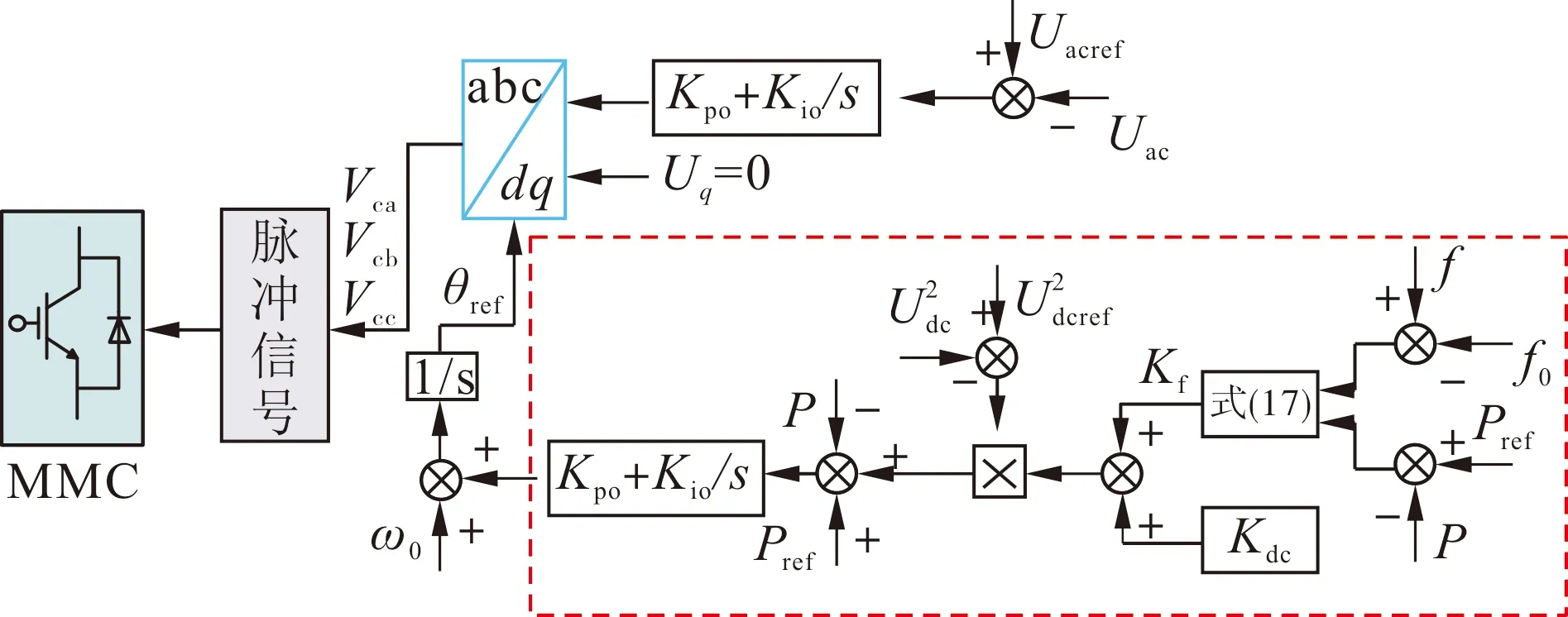
图5 改进型孤岛控制框图
3 算例分析
3.1 算例1:平滑切换
为验证本文所提的柔性互联变电站中改进孤岛控制策略的有效性,利用PSCAD/EMTDC暂态仿真平台搭建了如图1所示的仿真模型。其中换流器初始运行控制模式为主从控制,直流侧采用伪双极接线,同步发电机的惯性系数H取值为0.15,固定下垂系数选取为1.8,自适应惯性下垂系数根据实际模型的不同计算的下垂系数也存在差异性,仿真参数如表1所示。
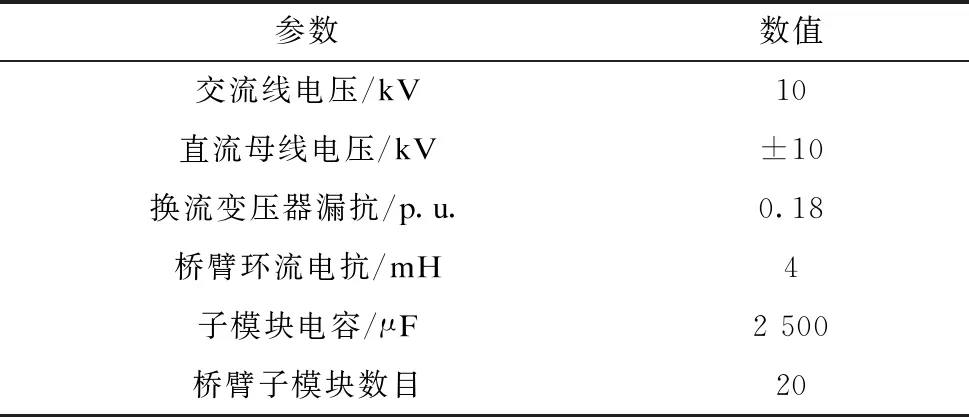
表1 换流器仿真参数
根据式(1)搭建了改进型孤岛控制模型,设定在变电站的单母线分段开关之间采用模块化多电平换流器替代分段开关。主变1侧母线负荷等效为8 MW,主变2侧母线负荷等效为10 MW,将换流器MMC1设定为主站,用于稳定直流侧母线电压,MMC2设定为从站,承担换流器功率的传输,0~1 s时MMC2功率设定为5 MW,1 s时主变2故障退出运行换流器切换不停电转供模式,该模式可以通过MMC1向故障侧提供电力缺额,保障负荷持续供电,满足负荷的供电可靠性。为便于分析,将孤岛控制模式和改进型孤岛控制模式进行对比分析,其中负载电流、电压选取其中一相进行对比。由于B2B-MMC运行在变电站内,本文孤岛检测时间很短,因此忽略孤岛检测时间。
图6给出了换流器从P/Q模式切换到孤岛控制模式和改进型孤岛控制模式的柔性互联变电站系统的动态响应对比波形。
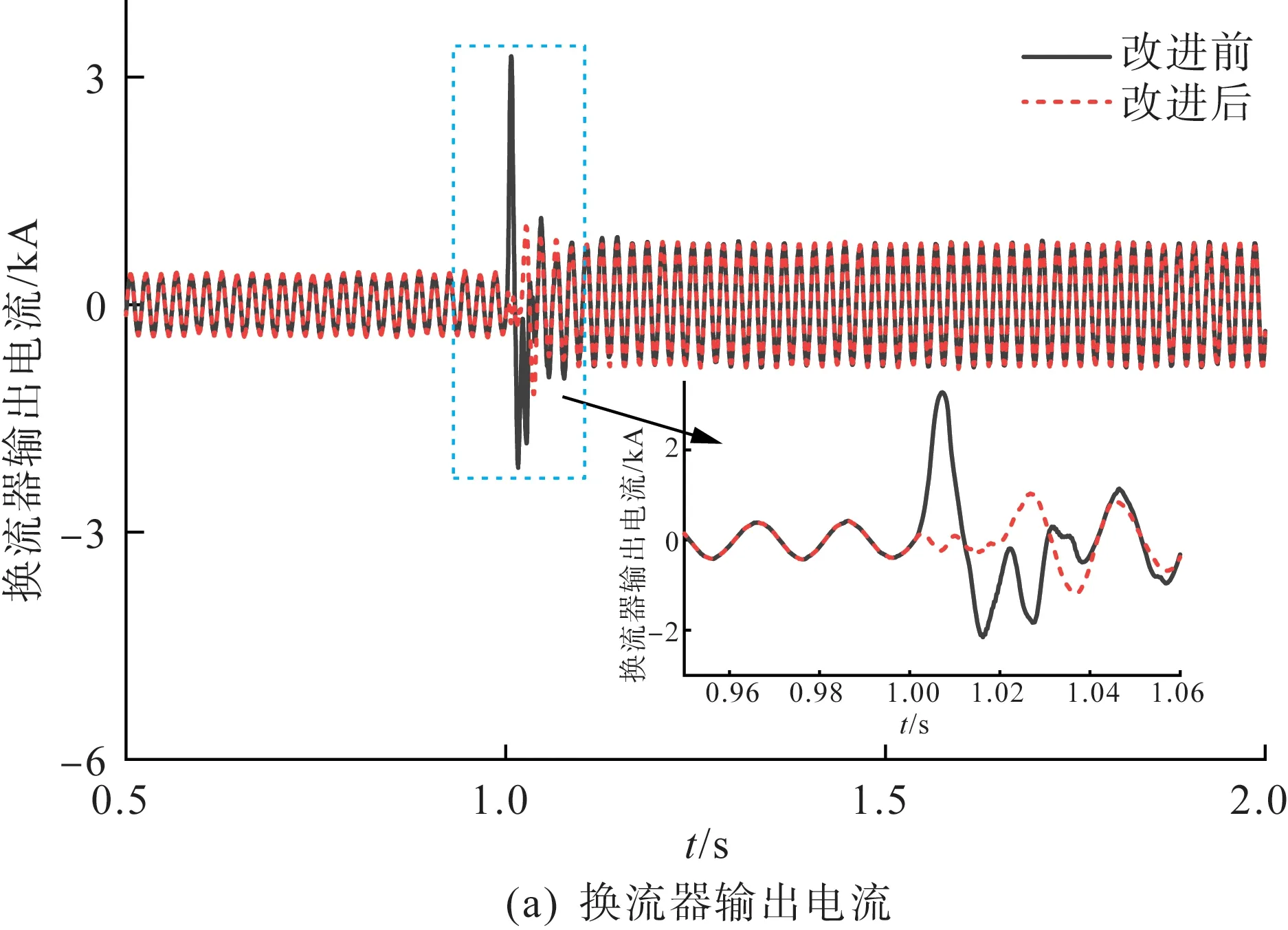
图6 孤岛模式切换运行特性对比图
由图6(a)—(b)可知,1 s时主变退出运行,MMC2承担10 MW负荷,换流器切换为常规孤岛运行模式。该模式为换流器硬切换,将产生较大的电压电流冲击,其中负载冲击电流达到3.1 kA,采用改进型孤岛控制模式冲击电流有效降低其值为0.54 kA,负载电压也引起短时的畸变;采用改进型孤岛控制模式,负载冲击电流大幅减小,负载电压趋于平稳。
由图6(c)、(d)可知,孤岛控制下换流器输出功率的大小取决于交流侧负荷;改进型孤岛模式切换过渡过程中,减小了换流器功率超调时间,换流器功率过渡过程非常短暂,在数毫秒内即过渡到新的稳态;采用孤岛控制模式时,切换瞬间直流电压大致波动在17.5 kV~22 kV,若波动时间过长严重影响换流器运行可靠性,而改进型孤岛控制模式,切换瞬间直流电压大致波动在19.6 kV~20.3 kV,直流母线电压偏离均在±0.5 kV以内,跌落程度明显变小,满足换流器运行规程,体现了改进孤岛控制模式在切换过程中的优势。
3.2 算例2:改进型孤岛模式下负荷突变
为进一步验证改进型孤岛控制模式能够适应孤岛模式下负荷的变化,设定主变1侧等效负荷为8 MW,主变2侧初始负荷为8 MW,MMC2初始功率设定为0,1 s时切换为改进型孤岛控制模式,1.5 s时孤岛侧负荷突增5 MW负荷,2 s时突减5 MW负荷,换流器参数与算例1一致,图7给出了改进型孤岛控制模式下的负荷突变的运行波形图。
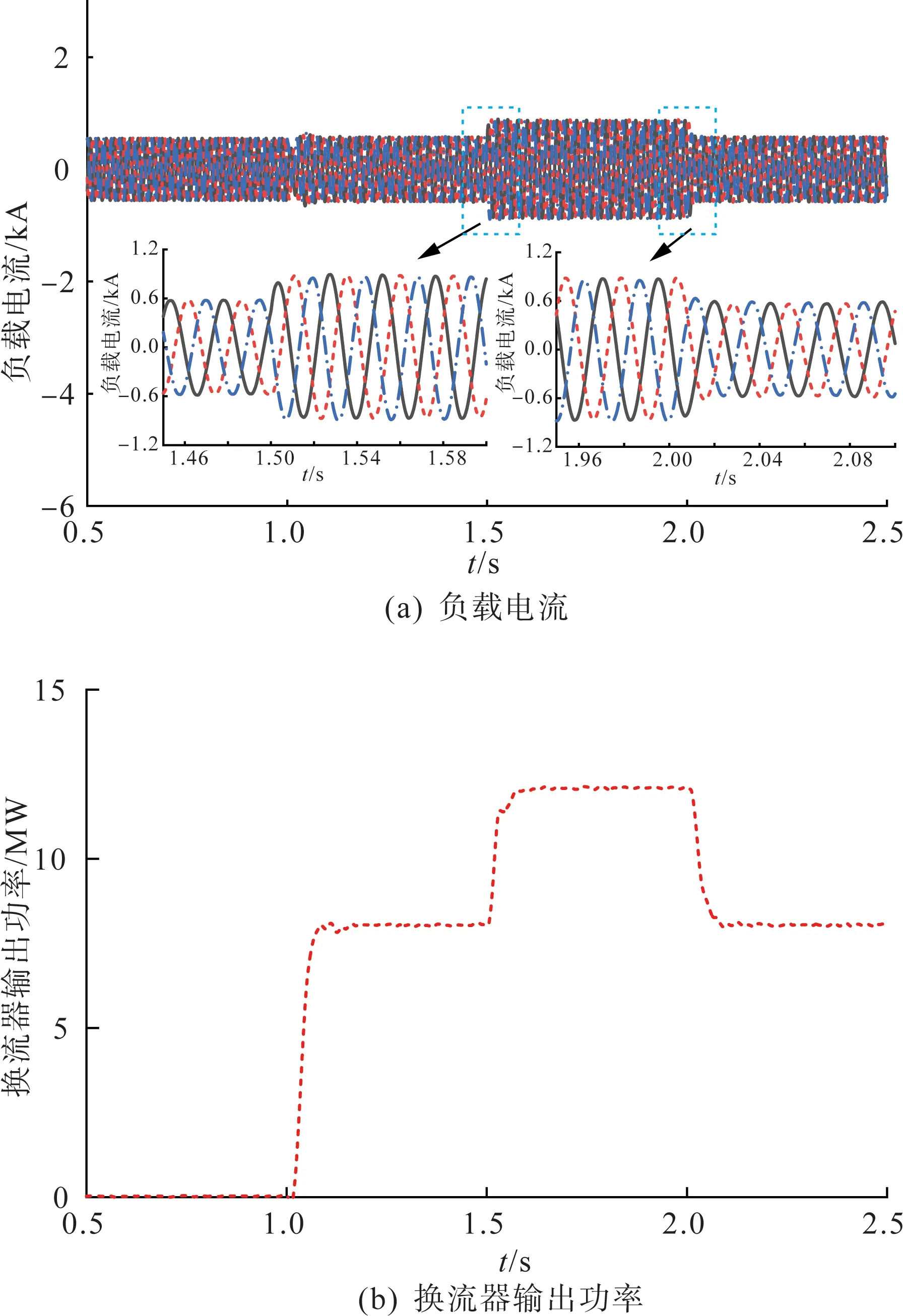
图7 改进型孤岛控制运行波形图
由图7可知,改进型孤岛控制能够适应失电状态下负荷的突变。在1.5 s时负荷突增工况下,采用改进型孤岛控制负载电流平稳过渡,换流器输出功率始终跟随负荷变化,直流侧电压在负荷突变是产生较小波动,波动范围始终在允许波动范围以内,2 s时负荷突减亦实现了换流器的平稳运行,证实了该控制能够在孤岛模式下的稳态运行。
4 结论
孤岛控制模式能够向失电区域不间断供电,体现了柔性互联配电网的优势所在。然而,由于孤岛控制与主从控制的控制器差异性较大,切换过程中控制系统亦会发生较大变化,容易产生冲击电流、冲击电压等现象。本文提出一种改进型孤岛控制模式,将有功-直流电压平方分配特性的固定下垂系数与利用虚拟惯量的自适应惯性下垂系数相结合,其中虚拟惯性技术是将B2B-MMC系统中直流侧有功功率和交流系统频率进行耦合,使其能够在切换过程中快速调节惯性下垂系数进而抑制切换过程中的暂态冲击,实现孤岛模式下的平滑切换,最后对所提控制策略进行仿真研究,结论如下。
1)本文所提的改进型孤岛控制模式,实现了换流器不同模式之间的平滑切换和失电区域的不间断供电,由仿真对比实验可知,切换过程中大幅减小了冲击电流、电压现象,同时减小了换流器功率超调时间,直流侧电压波动符合运行规程,提高了系统可靠性。
2)改进型孤岛控制模式同时能够适应失电工况下负荷突变带来的影响,实现了孤岛模式下的稳态运行,提高了系统稳定性。
