基于长江北斗CORS系统的PPK定位技术在航道测量中的应用
2022-03-07胡伟平
简 波,胡伟平,张 诚
(长江航道测量中心,湖北 武汉430010)
在航道测量中,利用RTK(real-time kinematic,实时动态载波相位差分)技术进行地形测量具有常规测量仪器难以比拟的优势,能够实时提供移动测点的三维定位结果,测量速度快、能实时进行数据的质量控制,且测量点位精度完全满足规范要求[1],在航道测量中已得到了广泛应用。但其应用范围受自然条件限制,特别在呈典型的带状特性且多弯曲的长江航道上,由于网络及差分信号传输等原因,RTK常常收不到差分信号或者无法得到固定解[2],无法达到定位的要求。
PPK(post processed kinematic,动态后处理)技术是利用进行同步观测的一台基准站接收机和至少一台流动接收机对卫星载波相位的观测值,之后利用GNSS(global navigation satellite system,全球导航卫星系统)处理软件进行解算,并经坐标转换得到流动站在某坐标系中的三维坐标。PPK作为一种动态后处理模式,无需数据通讯,且作业半径大、观测更灵活、效率更高,目前已得到广泛应用。赵建虎等[3]给出了基于GPS PPK和PPP(precise point positioning,精密单定位技术)的长距离潮位测量的思想和方法,并通过试验对其进行验证,取得了良好的效果;洪日桂[4]介绍基于CORS(continuously operating reference stations,连续运行参考站)系统的PPK和相关操作及数据后处理流程,结合像控外业测量实例,探讨此方法的可用性,并分析测量成果的内外符合精度以及作业应该注意的相关问题;张文朗等[5]针对PPK的优点,通过理论分析与实践,探索PPK在像控测量中的应用方法,达到提高作业效率、节省人力物力的目的。
用于坐标解算的基准站可以是在已知控制点上架设的基站,也可以是地方省级CORS基站、长江干线北斗地基增强系统(简称长江CORS系统)基站等。长江CORS系统覆盖长江干线带状范围,是以北斗卫星导航系统为主,兼顾其他导航卫星系统,可完全独立接收北斗卫星导航系统信号,且具备在不影响北斗信号接收安全的前提下接收其他卫星导航系统信号能力的地基增强系统[6]。本文分析基于长江CORS系统的PPK技术在长江航道水下地形测量中的应用,通过试验探索该技术在长江航道测量中的方法,并进行成果数据分析,论证该技术在长江航道测量中的可行性。
1 基于PPK定位技术的长江航道地形测量流程
基于PPK的长江航道地形测量作业流程分为资料收集、基准站数据获取、设备安装、数据采集、数据处理等步骤,见图1。
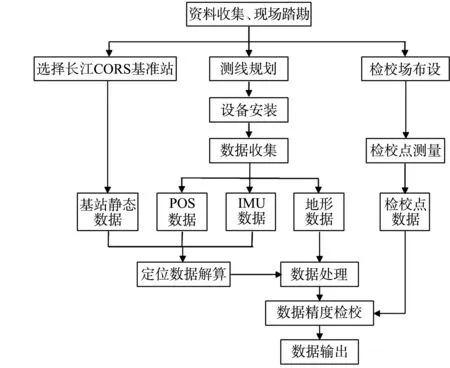
注:POS为定位定姿系统;IMU为惯性测量单元。
2 实测试验
2.1 基准站选择及数据收集
为验证基于长江CORS系统的PPK定位技术在长江航道测量中的应用可行性,依托相关工程在长江下游张家洲水道开展测量试验。通过现场踏勘收集测区已有的前期测量成果,校对获取的控制点坐标成果及不同坐标系之间的转换参数,确定坐标基准及试验所需坐标转换参数。
张家洲水道试验区附近有湖口和九江两个长江CORS系统基准站,其中湖口基站距张家洲水道测区中心约10.3 km,九江基站距离约14.0 km,精度分析均基于湖口基站。此外,由于多波束系统测量时采用RTK定位方式,可用于比较基于长江CORS系统基站PPK解算的水深数据精度,因此试验时还在已知控制点上架设了基站,自架基站一方面向多波束测深系统提供RTK定位服务;一方面采集静态观测数据供激光雷达系统进行PPK解算。各基站的位置见图2。试验外业工作结束后,通过长江CORS系统有关管理部门收集外业期间长江CORS系统湖口基站记录的静态观测数据。

图2 试验区使用基站位置
2.2 检校点布设及测量
试验中在测区内根据不同的地形地貌特征,均匀选择诸如房角、围墙角、道路交角等特征明显地物点,利用RTK流动站或全站仪进行点位的平面及高程数据采集,用于基于长江CORS系统PPK解算的激光点云数据平面、高程和相对关系精度检测分析。
2.3 数据采集
本文采用多波束测深系统及机载激光雷达系统进行水下地形及陆域地形数据采集。数据采集前,按要求进行设备的校准。测量时,多波束测深系统采用RTK定位方式;将激光雷达上的POS系统作为流动站,观测模式为PPK模式,采样率与自架基站相同,与基准站的数据进行同步观测,同时采集GNSS、IMU观测数据。
2.4 定位数据解算
POS解算前,将基站原始文件进行格式转换,生成Renix文件。POS解算采用Inertial Explorer第三方后处理软件进行,处理位置、速度和姿态等信息,融合GNSS和INS(inertial navigation system,惯性导航系统)数据,生成轨迹文件,其主要操作流程见图3。
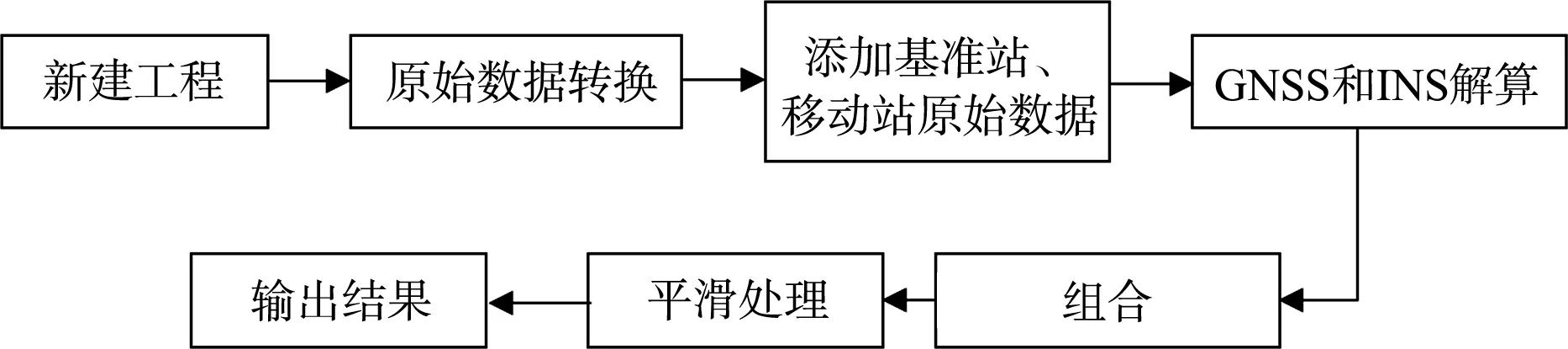
图3 Inertial Exploer后处理流程
2.5 数据处理
使用各测量系统的数据处理软件,分别将POS和原始多波束、激光点云数据融合并解算出las格式的数据文件,并对数据进行滤波、去噪等处理,对于激光点云数据,则进行数据则分类处理,提取点云中的地面点。
3 数据精度分析
3.1 水深数据定位精度分析
在测区中选择4条测线,用长江CORS系统基站的静态数据进行PPK解算,并导出航迹数据文件,与实测时RTK的航迹定位数据进行比较,精度见表1。

表1 基于长江CORS系统的PPK定位精度
由表1可看出,4#、21#两条测线PPK平面定位精度可以达到20~30 mm,高程精度也在70 mm以内,满足规范要求。但是11#、18#两条测线的平面及高程精度均超过规范要求的精度范围,其原因可能来自于基站不稳定的静态数据。
3.2 激光点云数据定位精度分析
为分析激光点云的数据定位精度,在试验测区进行了两次机载激光雷达数据采集试验。外业结束后,将采集的激光点云数据用长江CORS系统湖口基站的静态数据进行定位数据的解算,与通过RTK采集的部分检核点进行对比,并计算其中误差。两个测次激光雷达数据平面及高程精度的对比分析见表2。

表2 基于长江CORS湖口基站激光点云平面及高程精度分析
由表2可看出,用长江CORS湖口基站解算的点云数据,计算所得的中误差值均满足规范的精度要求;但有的点误差较大,特别是高程平均误差约200 mm。
4 结语
1)本文试验是首次将长江CORS系统应用在航道测量中。通过试验数据分析可看出,基于长江CORS系统的PPK技术是RTK技术的有效补充,其平面定位精度可满足规范要求,但高程精度则不稳定。
2)对高程精度要求不大的长江航道日常维护测量中,可以选择测区附近的CORS基站,采用PPK定位模式进行航道地形测量,但为保证数据质量,需要采取一定的方式进行数据校验。
3)目前如果完全依靠长江CORS基站的数据,则可能影响数据质量,关键取决于CORS基站有效覆盖范围,在实际工作中要对选取的基站数据进行验证,并不断总结。随着长江CORS系统的运行、应用及基站数量和位置也在不断优化,长江CORS系统将在长江航道测绘和地理信息服务方面发挥巨大作用。
