基于Cruise & Matlab Simulink的P2混动越野车开发研究
2022-03-07孙国庆寇西征安琴周振华余翔宇
孙国庆 寇西征 安琴 周振华 余翔宇




摘 要:混合动力技术是当前越野车领域的重要发展方向。论文基于某型P2混动越野车,首先根据车辆功能要求及P2构型特点,定义整车功能;根据整车功能定义,通过理论计算初步选定动力系统参数, 然后利用AVL Cruise & Matlab/simulink进行了整车动力性经济性联合仿真,并根据仿真结果,对仿真控制策略进行了优化,最终达成整车动力性经济性设计指标。论文对越野车P2混动构型开发具有一定的指导作用。
关键词:越野车;混合动力; P2;Cruise;控制策略
中图分类号:U462.2;U462.3 文献标识码:A 文章编号:1005-2550(2022)01-0081-06
Research On Development Of P2 Configuration Off-Road Vehicle Based On Cruise & Matlab Simulink
SUN Guo-qing, KOU Xi-zheng, AN Qin, ZHOU Zhen-hua, YU Xiang-yu
( DongFeng off-road vehicle Co., Ltd, Wuhan 430058, China )
Abstract: The hybrid technology is an important development direction in the field of off-road vehicle. Based on a certain of P2 configuration of Hybrid Off-road Vehicle, firstly, the whole vehicle function is defined according to the vehicle function requirements and P2 configuration characteristics; according to the vehicle design requirements, the powertrain parameters are preliminarily selected through theoretical calculation, and then the vehicle dynamic and economic joint simulation is carried out by using AVL Cruise & Matlab / Simulink, The simulation control strategy is optimized to achieve the vehicle power and economic design index. This paper has a certain guiding role on the development of hybrid vehicle configuration.
Key words: off-road Vehicle; HEV; P2; cruise; control Strategy
隨着国家油耗、排放法规的不断升级及国家能源战略的引导,新能源汽车得到了快速发展。在纯电技术尚未取得重大突破之前,混合动力系统逐渐成为各大汽车公司重点发展的技术方案,将会与传统动力系统、纯电动系统长期并存。越野车工作环境恶劣、工况复杂,对动力性要求高;而适用于普通商用车的油耗法规则是民用越野车发展的一大难题。在传统发动机节能技术难以取得突破的情况下,混合动力技术是解决民用越野车油耗法规问题的一条重要途径。
1 概述
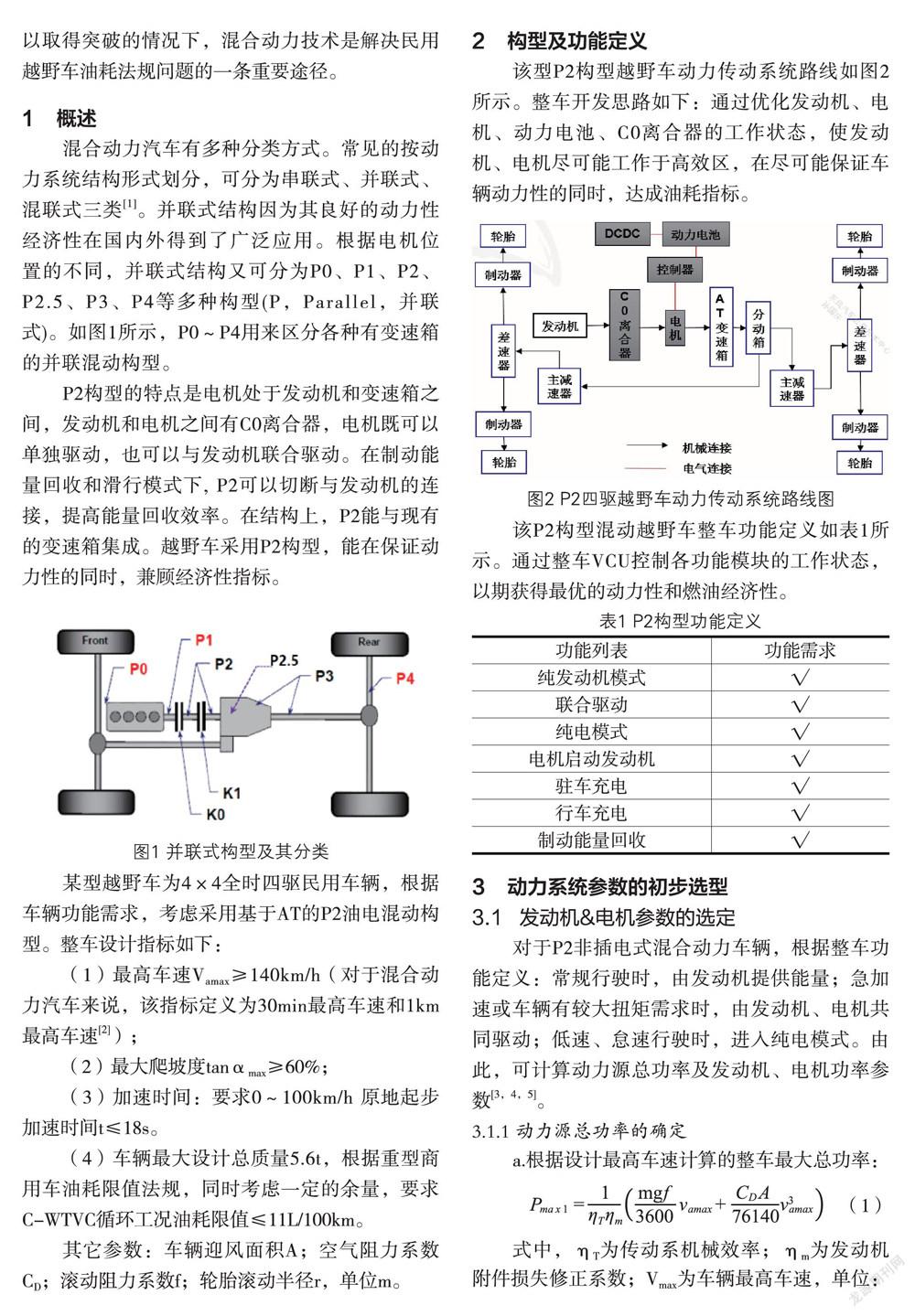
混合动力汽车有多种分类方式。常见的按动力系统结构形式划分,可分为串联式、并联式、混联式三类[1]。并联式结构因为其良好的动力性经济性在国内外得到了广泛应用。根据电机位置的不同,并联式结构又可分为P0、P1、P2、P2.5、P3、P4等多种构型(P,Parallel,并联式)。如图1所示,P0~P4用来区分各种有变速箱的并联混动构型。
P2构型的特点是电机处于发动机和变速箱之间,发动机和电机之间有C0离合器,电机既可以单独驱动,也可以与发动机联合驱动。在制动能量回收和滑行模式下, P2可以切断与发动机的连接,提高能量回收效率。在结构上,P2能与现有的变速箱集成。越野车采用P2构型,能在保证动力性的同时,兼顾经济性指标。
图1 并联式构型及其分类
某型越野车为4×4全时四驱民用车辆,根据车辆功能需求,考虑采用基于AT的P2油电混动构型。整车设计指标如下:
(1)最高车速Vamax≥140km/h(对于混合动力汽车来说,该指标定义为30min最高车速和1km最高车速[2]);
(2)最大爬坡度tanαmax≥60%;
(3)加速时间:要求0~100km/h 原地起步加速时间t≤18s。
(4)车辆最大设计总质量5.6t,根据重型商用车油耗限值法规,同时考虑一定的余量,要求C-WTVC循环工况油耗限值≤11L/100km。
其它参数:车辆迎风面积A;空气阻力系数CD;滚动阻力系数f;轮胎滚动半径r,单位m。
2 构型及功能定义
该型P2构型越野车动力传动系统路线如图2所示。整车开发思路如下:通过优化发动机、电机、动力电池、C0离合器的工作状态,使发动机、电机尽可能工作于高效区,在尽可能保证车辆动力性的同时,达成油耗指标。
该P2构型混动越野车整车功能定义如表1所示。通过整车VCU控制各功能模块的工作状态,以期获得最优的动力性和燃油经济性。
3 动力系统参数的初步选型
3.1 发动机&电机参数的选定
对于P2非插电式混合动力车辆,根据整车功能定义:常规行驶时,由发动机提供能量;急加速或车辆有较大扭矩需求时,由发动机、电机共同驱动;低速、怠速行驶时,进入纯电模式。由此,可计算动力源总功率及发动机、电机功率参数[3,4,5]。
3.1.1 动力源总功率的确定
a.根据设计最高车速计算的整车最大总功率:
式中,ηT为传动系机械效率;ηm为发动机附件损失修正系数;Vmax为车辆最高车速,单位:km/h。
b.根据最大爬坡度计算的整车最大总功率:
式中,Vp为最大爬坡度对应的车速,单位:km/h;αmax为最大坡度角。
c.根据加速性能计算的整车最大总功率:
式中,Vf为加速结束后的车速,单位m/s;Vb为驱动电机额定转速对应的车速,单位m/s;ρa为空气密度;ta为预期的加速时间,单位s;δ为旋转质量转换系数。
对于以上动力性三项指标计算的各自最大功率,动力源总功率需满足:
3.1.2 发动机最大功率的确定
根据整车功能定义,发动机最大功率需满足车辆以最高车速行驶时的功率需求,故发动机最大功率需满足:
(5)
3.1.3 电机功率参数的确定
由(4)式可知,电机峰值功率需满足:
(6)
考虑电机的过载特性,若λ为电机过载系数,则驱动电机的额定功率为:
由此,可初步选定发动机、电机功率参数。发动机、电机的扭矩、转速参数可根据功率、转速、转矩的关系综合考虑计算:
3.2 动力电池参数选型
动力电池匹配主要分为能量匹配和功率匹配[5]。
动力电池组的能量取决于纯电续驶里程要求,电池组的能量越大,纯电续驶里程越长,但整车重量和成本随之增加。油电混动车型在保证车辆纯电续驶里程要求的情况下,动力电池组能量应尽可能小。动力电池组的总能量计算公式为:
式中,S为设定纯电续驶里程,单位km,在基于循环工况油耗的混合动力电池参数选型时,S可根据循环工况特征设定;ζSOC为蓄电池放电深度(%);SO为单位能量纯电续驶里程(km/kwh),该值可根据纯电行驶条件计算得到,也可以参考同类车型统计值。通常在计算时,由于电池SOC特性的变化,动力电池组的总能量需要考虑一定的余量。
动力电池组必须满足驱动电机驱动、发电时的最大功率需求。动力电池组充放电额定功率、峰值功率要不低于驱动电机额定功率、峰值功率,并尽可能通过电池管理系统使动力电池的充放电功率与电机功率相匹配,以提高充放电效率。
3.3 传动系参数计算
a.根据车辆最高车速确定最小传动比范围[3,6]:
式中,np为发动机、电机耦合最大转速。
b.根据理论最大爬坡度确定最大传动比范围:
式中,Temmax为发动机、电机最大耦合转矩。
根据P2混动越野车总体设计要求,减速系统分为变速箱、分动箱、主减速器三级,总传动比公式: (12)
式中,ig 为变速箱各档传动比,io 为分动箱传动比,ic 为主减速器传动比。根据P2混动越野车总体设计要求,结合车辆使用工况特点及现有供应商产品数据,最终确定越野车传动系及速比方案[6]。
3.4 选型小結
综上,初步计算选定发动机、电机、动力电池等主要参数,如表2所示:
4 整车动力性经济性仿真
4.1 整车动力性经济性仿真概述
用AVL Cruise软件建立P2混动越野车动力性经济性仿真模型,用Matlab/simulink模块设置仿真控制策略,根据《GB/T 19752-2005 混合动力电动汽车动力性能试验方法》[2]及《GB/T 19754-2015 重型混合动力电动汽车能量消耗量试验方法》[7]设置动力性经济性计算任务。基于AVL Cruise与Matlab/simulink的DLL接口或API接口,进行AVL Cruise & Matlab/simulink联合仿真。仿真数模如图3所示。
根据《GB/T 19754-2015 重型混合动力电动汽车能量消耗量试验方法》的规定,对于不可外接充电型混合动力电动汽车,需要计算车辆C-WTVC循环工况的等效燃料消耗量,整车控制策略需保证车辆在循环工况前后SOC平衡,根据GB/T 19754的规定,循环工况油耗计算任务中限定电量消耗绝对值在整个循环工况中的能量消耗比例不高于±1%。
4.2 仿真控制策略设置
控制策略定义:混动模式下,发动机、电机通过转矩耦合共同驱动车辆,混动工作模式及扭矩判断逻辑如图6所示。a.设置纯电行驶条件:1、车速限值;2、请求功率限值;3、P2扭矩/功率容量;4、SOC水平;5、暖机阶段(保留)等。b.设置混合动力驱动条件:1、车速限值;2、扭矩、功率条件;3、变速箱各档位限扭要求;4、SOC水平等。c.强制纯发动机驱动条件。
各功能模式下零部件工作状态:1、发动机启动,由电机启动发动机;2、纯电驱动/蠕行;3、扭矩助力,整车由大扭矩需求时,发动机/电机联合驱动;4、发动机工况点转移,在循环工况过程中,为了保证发动机始终处于高效区,要通过行车充电状态来调整发动机工况点;5、制动能量回收;6、怠速充电模式,即驻车充电功能;7、强制行车充电,行车过程中,当动力电池电量低于一定限值时,电机需要强制对动力电池充电,以满足整车高低压供电需求;8、传统驱动,根据整车功能定义,预留强制纯发动机驱动功能。
4.3 动力性经济性仿真
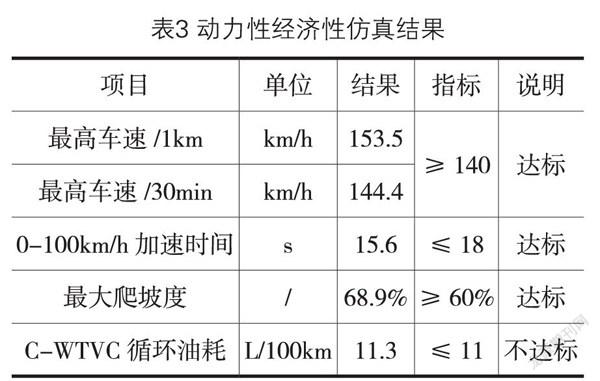
按上述控制策略进行AVL Cruise & Matlab/simulink联合仿真;设置对应的动力电池SOC初始值,分别开展动力性、经济性指标计算。仿真结果如表3所示。仿真结果表明,除循环工况油耗指标外,该P2混动越野车动力性各项指标均达标。研究如何在保证不降低整车动力性的情况下,降低循环工况油耗指标,是后续仿真优化的一项重要任务。
4.4 仿真及控制策略优化
4.4.1 仿真结果分析
仿真结果显示,该P2混动越野车C-WTVC循环过程中发动机、电机工况点尚有大部分分布于低效率区,导致燃油经济性差。由于受车辆其它条件限制,整车参数和变速箱换档策略很难调整,研究在尽可能不改动整车参数及换档策略的情况下,优化仿真控制策略,以求降低循环工况油耗。
4.4.2 控制策略优化
反复优化控制策略,使发动机和电机工况点尽可能往高效区转移,同时使动力电池达到SOC平衡。发动机工况点优化前后对比如图5所示。
4.4.3 仿真优化结果
经过仿真控制策略优化,最终计算的C- WTVC循环工况油耗达到10.04L/100km,达成设计指标要求。在保证动力性的前提下,循环工况油耗得到了改善。
优化后的C-WTVC循环工况动力电池SOC状态如图6所示。整个C-WTVC循环工况过程中,第一阶段市区工况(0-900s),主要是低速、怠速区域,以纯电驱动模式为主;第二阶段公路工况(900s-1368s),为中低速区域,以行车充电及纯电驱动等模式相結合;第三阶段高速工况(1368s-1800s)为电量调整阶段,以行车充电模式为主。在C-WTVC循环工况过程中,为保证发动机始终工作在高效区,同时在整个循环工况过程中保持电量平衡,实际上纯发动机驱动模式很少。
5 结束语
论文定义了P2混动越野车的功能模式,并初步通过理论计算选定了动力系统参数。然后基于AVL Cruise软件搭建了仿真模型,用Matlab/simulink软件设置仿真控制策略,并进行了基于AVL Cruise & Matlab/simulink的联合仿真。根据仿真结果,对仿真控制策略进行了优化,最终达成设计目标值。论文对越野车P2混动构型开发具有一定的指导作用。
参考文献:
[1]QC/T 837-2010 混合动力电动汽车类型.
[2]GB/T 19752-2005 混合动力电动汽车动力性能试验方法.
[3]余志生.汽车理论[M].第五版.北京:机械工业出版社,2009.
[4]彭莫,刁增祥.汽车动力系统计算匹配及评价[M].北京:北京理工大学出版社,2009.
[5]崔胜民.新能源汽车技术解析 [M].北京:化学工业出版社,2017.
[6]孙国庆,孟建军,叶建伟等.基于Cruise的越野车动力匹配技术研究[J].汽车科技,2018(5):29-33.
[7]GB/T 19754-2015 重型混合动力电动汽车能量消耗量试验方法.
专家推荐语
王华武
东风商用车有限公司技术中心
新能源平台总师将P2混动技术应用于越野车经济性改善场景是一种新的技术探索。