仿生结构在软机器人中的应用
2022-03-04刘思远
刘思远,杨 晔
(上海师范大学 信息与机电工程学院,上海 200234)
1 背景介绍
目前,大部分机器人为刚性机器人,在与人或易碎物品交互时,容易使人受伤或损坏物品,因此研究人员将目光转向软机器人。软机器人具有弹性及更高的稳定性,更容易通过狭小的缝隙或管道,且在碰撞时不易损坏[1]。因此,近些年来,软机器人已经成为一个新兴的研究领域。
在不同的应用背景下,软机器人通常需要单独设计,包括其结构、材料、驱动方式和运动方法,这些大多可以在自然界中找到类似的原型。自然界中的大部分生物都是软体结构,通过模仿这些生物,可以在降低软机器人设计难度的同时,使软机器人拥有与这些生物类似的能力,或者适应这些生物的生活环境。
本文首先介绍了软机器人的材料、制造方法、驱动方式和控制方法,然后从结构仿生和功能仿生两方面综述了仿生结构在软机器人中的典型应用,如图1所示。

图1 研究概况
2 软机器人的基本制造方法
2.1 材料
目前,软机器人使用的最多的材料是硅树脂,其优点是易于塑形,易于获取。但是硅树脂本身无法产生动力,需要外界驱动[2]。而形状记忆材料可以自身产生动力,可以类比为软机器人的肌肉。典型的形状记忆材料包括形状记忆合金、形状记忆聚合物和液晶弹性体。
2.2 制造方法
目前,软机器人主要的制造方式为3D打印。对于常见大小的软机器人,通常采用熔融沉积成型(Fused Deposition Modelling,FDM)进行打印[3],这种打印方式的精度通常在毫米尺寸。对于体型更小精度要求更高的软机器人,可以采用微型3D打印[4]或立体光刻[5]的方法。
2.3 驱动方式
常见的纯软机器人驱动方式包括气体驱动、液压驱动、磁驱动和形状记忆材料驱动。此外通过软硬结合的方法还可以用传统机器人的方式驱动软机器人,如化学反应驱动[6]、电机驱动[7]等。
2.4 控制方法
软机器人在工作时会受力变形,因此刚性机器人开发的理论很难适用于软机器人。目前,常见的软机器人控制方法:有模型控制、无模型控制以及两者混合的控制方法[8]。有模型控制是指对软机器人建立模型,然后通过建立的模型推导软机器人的控制方法,其中最常见的模型建立方法是有限元分析法。无模型控制是指通过机器学习对软机器人进行控制,最常见的方法是通过人工神经网络(ANN)进行控制。
3 结构仿生
自然界中的生物经过千百年的进化,其结构能很好地适应其生存环境。结构仿生是通过研究生物肌体的构造,建造类似生物体或其中一部分的机械装置,通过结构相似实现功能相近,如图2所示。

图2 典型结构仿生图
3.1 蚯蚓仿生
蚯蚓运动的优点在于多功能性、稳定性和高空间效率。Ge等[9]通过模拟蚯蚓的身体结构,设计出的软机器人可以通过简单的气动结构实现软机器人的运动。其主要结构为3部分,可以改变对地面摩擦力的前后端和可以拉伸收缩的中间部分。其运动过程分为2个阶段:首先前端抓地后端放松,中间部分收缩,将后端往前拉;然后前段放松后端抓地,中间部分拉伸,将前端往前推。
类似的结构也可以应用在磁驱动的软机器人上。Joyee等[10]设计的软机器人,两端为磁性材料,中间部分为软材料。通过外界磁场可以使两端左右移动,使中间部分弓起或伸直,从而实现类似蚯蚓的移动方式。
3.2 青蛙仿生
青蛙的双肢合作游泳法克服了鱼尾运动时的侧向力和重心偏移问题,使青蛙的运动更加稳定,在较短的时间内达到较高的游泳速度。Fan等[11]通过模拟青蛙的身体结构,设计出的软机器人直线运动时的平均推进速度为0.075 m/s,平均转弯速度为15°/s,同时重量和体型均远小于传统的硬青蛙仿生机器人。
3.3 蛇仿生
蛇在攀爬树木时,通过快速缠绕不同直径的树枝来提高稳定性。Liao等[12]模仿蛇的身体结构,设计出的软机器人可以像蛇一样攀爬运动,包括沿着一根杆拐弯,以30.85 mm/s的最大速度攀爬垂直杆,并且比现有的软攀爬机器人在垂直表面上承载更大的有效载荷。
3.4 壁虎仿生
通常的软机器人只能在水平的平面上移动,当坡度过大时,这些机器人就无法正常行动。Schiller等[13]从壁虎的爬行中得到灵感,设计并制造了一款可以在高坡度的斜面上行动的软机器人,模拟了壁虎的身体结构和运动方式,即通过吸盘吸附在墙壁上,通过四肢和腰部的扭动爬行。通过气动的方式驱动6个执行器,该软机器人能够爬上坡度高达84°的倾斜平面。
4 功能仿生
功能仿生的目的是使人造的机械具有或能够部分实现高级动物丰富的功能,如思维、感知、运动、操作等,如图3所示,这在智能机器人的研究中具有重大意义。
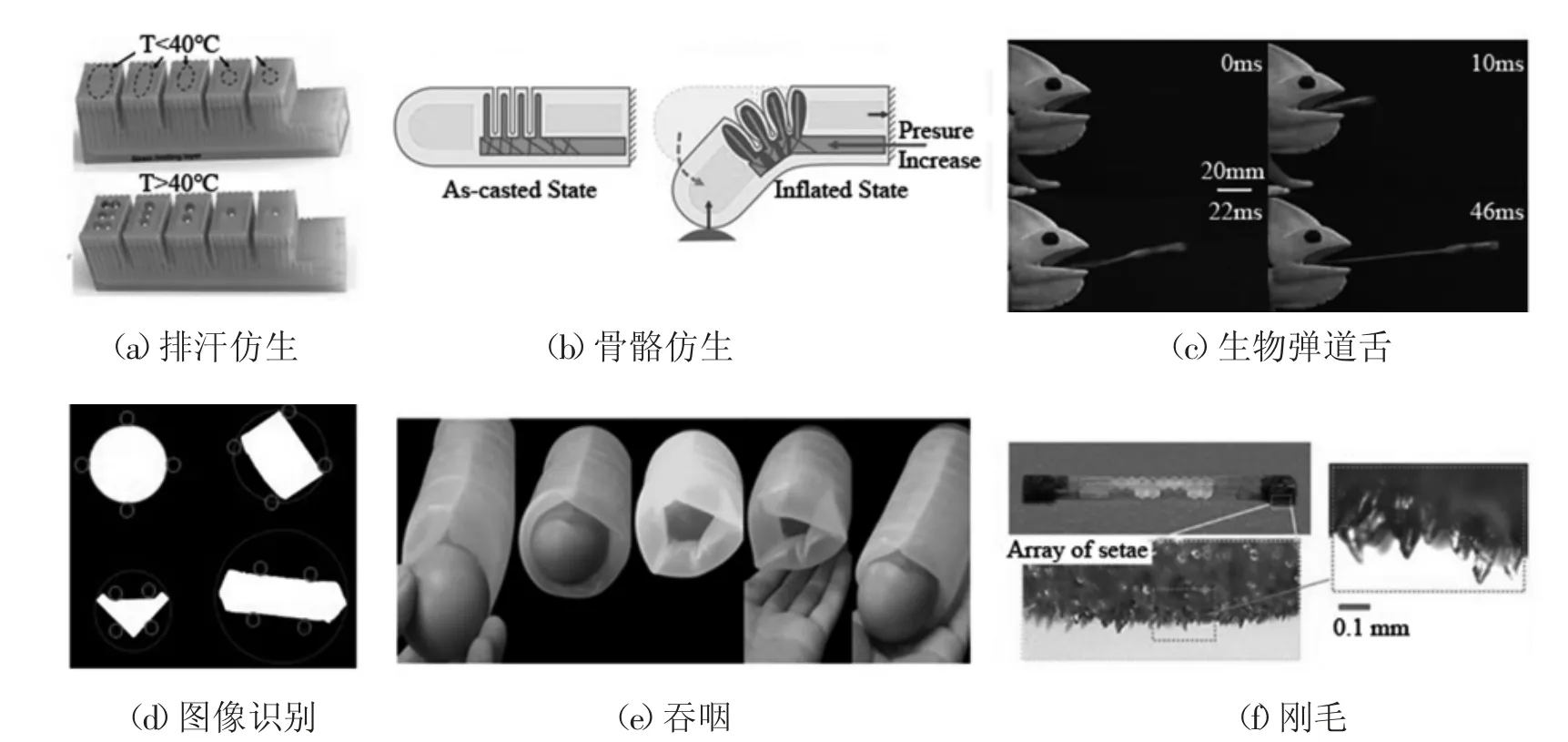
图3 典型功能仿生图
4.1 排汗
与金属不同,许多弹性体系统在环境温度下具有更高的热膨胀系数和更低的导热系数,因此更加需要稳定的工作温度。通过模拟生物排汗的功能,可以实现软机器人在高温环境下的温度稳定。Mishra等[14]利用多材料立体光刻技术,3D打印了手指状流体弹性体致动器,其具有聚-N-异丙基丙烯酰胺(PNIPAm)主体,其上覆盖有微孔(约200μm)聚丙烯酰胺(PAAm)背层。在低温(<30℃)下,孔隙充分闭合以允许加压和驱动,而在高温(>30℃)下,孔隙扩张以允许液压致动器中的局部出汗。与类似的非出汗装置相比,此类出汗致动器的冷却速率提高了600%。
4.2 骨骼
骨骼化是生物结构复杂化的基础,功能是运动、支持和保护身体。在软机器人中加入骨骼结构,有利于力的传递,增加软机器人运动的稳定性。Preechayasomboon等[15]通过在软机器人内部加入空心的硬质材料,不仅可以起到骨骼的作用,还降低了软机器人的重量。
4.3 生物弹道舌
目前,软机器人的抓取速度都比较缓慢,且通常只能抓取静止的物体。Kan等[16]模仿蜥蜴等动物的弹射舌,通过电磁弹射,实现了非常快速的抓取功能。但是这个软机器人只能发射,无法将发射的结构再次收回。
4.4 图像识别
视力是人类获取信息最主要的感官,当我们抓取一个物体时,通常会根据看到的物体形状,调整我们的抓握策略。Huang等[17]通过图像识别,判断需要抓取的物体形状。再通过神经网络,将图像数据作为输入,输出抓取模式,从而设定软机器手的各个参数。
4.5 吞咽
吞咽是动物与外界环境相互作用的重要方式,可以有效地捕获目标,并保持目标的完整性,也可以给吞咽物体提供有效的保护。Li等[18]设计了一个软体吞咽机器人,可以吞咽小型物体,或者将吞咽的物体吐出。通过向软机器人内部充水或空气,可以给吞咽的物体提供保护。
4.6 刚毛
在自然界中,很多生物群体都进化出了刚毛的结构。这些动物不需要爪子或腿用力,也可以在超光滑的倾斜甚至倒转的表面上行走。当刚毛的底部与任何基质接触时,由于接触点处的范德华力而产生粘附,摩擦和粘附取决于与表面接触的刚毛数量和接触面的面积。Joyee等[19]研究发现,机器人脚垫的毛状附着力和工程疏水性使其能够在湿滑的环境中进行稳健的导航。他们设计的软机器人可以在湿滑的表面上行动。
5 仿生软机器人的现状与挑战
目前,绝大部分的仿生软机器人仍然在实验阶段,很少有实际的应用。在工业上,软机器人夹持器可以更好地贴合物品,抓取易碎或不规则物品。在医疗领域,软机器人已经可以用于辅助运动或术后复健[20]。此外,软机器人潜在的应用还包括水下探索、药物输运和肠镜等。
但是软机器人目前仍然有很多的问题需要解决。受制于传感器和驱动等问题,目前绝大部分软机器人都不能实现远程控制,活动范围受到气管或电线的限制。此外,软机器人身体和传统的刚性电子设备之间的连接在物理上是脆弱的,容易断裂。在将来,仍需要材料学的发展,并对软机器人的控制进一步研究,才能真正将软机器人推向实用。
