高精度矿用超声波风速测量仪设计
2022-03-04李秉芮刘娜井上雅弘
李秉芮, 刘娜, 井上雅弘
(山东科技大学 安全与环境工程学院, 山东 青岛 266500)
0 引言
通风智能化是指通过动态采集通风信息实现通风状态分析、故障诊断和风量调控,是矿井通风的主流发展方向[1-2]。信息采集是通风智能化的基础,然而目前井下风速测量常用的机械式风表、压差式和超声波涡街式风速监测传感器的测量范围大多为0.3~15 m/s,误差为±0.2 m/s[3],启动风速几乎都大于0.3 m/s[4-8]。《煤矿安全规程》第一百三十六条规定:输送机巷,采区进、回风巷,采煤工作面,掘进中的煤巷和半煤岩巷的最低允许风速为0.25 m/s;掘进中的岩巷和其他通风人行巷道的最低允许风速为0.15 m/s。现有风速传感器难以满足《煤矿安全规程》的风速测量要求,同时也难以满足通风系统异常诊断及智能调控的需要,是通风智能化需要解决的技术难题之一[9-10]。
超声波风速测量仪可以适应恶劣环境,具有较高的精度和较宽的测量范围,因而被广泛应用于气象、军事、矿山等领域[6,11-13]。利用超声波测风速有涡街法和时差法2种技术途径。之前煤矿普遍使用的超声波风速传感器多采用涡街法,如GFW15型矿用风速传感器[5],但涡街法对风流稳定性及安装精度要求较高。时差法不破坏风流流场,无压力损失,几乎不受风流温度、压力等因素影响,是未来矿井风速测量技术的发展方向。国外生产的风流监测设备如Accutron MAQS和Zephyr AQSTM均采用超声波时差法。国内早期开发的基于超声波时差法的矿用风速测量仪使用2对超声波换能器,通过交替发射与接收超声波信号实现风速测量[14]。文献[15]在此基础上进行了改进,使用1对超声波换能器完成风速测量,最低测量风速达0.2 m/s,性能优于传统的风速测量仪,但由于风速越低,测量误差越大,该风速测量仪仍不能满足矿井低风速条件下精准测风需要。针对该问题,本文基于超声波时差法风速测量原理,设计了一种具有低启动风速的高精度矿用超声波风速测量仪。
1 超声波时差法风速测量原理
超声波在空气中的传播速度与风速叠加,在顺风方向上传播速度加快,在逆风方向上传播速度变慢,在一定检测条件下与风速函数对应,可通过计算求出精确风速。超声波在空气中的传播速度受温度的影响,但若采用2个通道分别检测2个相反方向的超声波传播速度,则温度对超声波传播速度产生的影响可以忽略不计。超声波时差法风速测量原理如图1所示。在巷道相对的两侧巷壁分别布置A1,A2和B1,B22组超声波探头。其中A1,B2为超声波发射探头,A2,B1为超声波接收探头。发射探头与接收探头的距离为L,其连线与风流方向的夹角为α。
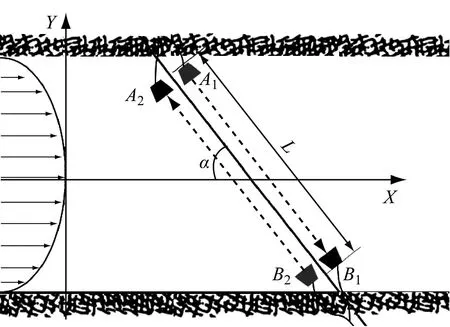
图1 超声波时差法风速测量原理Fig.1 Principle of wind speed measurement of ultrasonic time-difference method
设巷道的风流方向为X方向(巷道轴方向),与风流方向垂直的方向为Y方向,沿Y方向的风速分布为v(Y),当A1,B2同时发射超声波时,顺风方向超声波由A1到B1的传播时间为
(1)
式中:C为巷道空气中超声波的传播速度,m/s,C=331.45+0.607t,t为巷道空气温度,℃;l为测距的积分变量。
逆风方向由B2到A2的传播时间为
(2)
用平均风速vm表示沿Y方向的风速分布v(Y),并代入式(1)和式(2)得
(3)
(4)
由式(3)和式(4)可得
(5)
(6)
当L已知时,测量顺风与逆风状态超声波的传播时间,根据式(5)即可求出沿Y方向的平均风速,且与风流温度无关。当超声波探头受外界影响而发生位移时,可根据式(6)计算位移量并校准探头间距。
2 超声波风速测量仪设计和信号调理
2.1 超声波风速测量仪设计
超声波风速测量仪工作原理如图2所示。超声波发射探头A1,B2和接收探头A2,B1交错设置,形成2个超声波传播通路,分别用于测算超声波在特定风速场中的顺风和逆风传播时间。
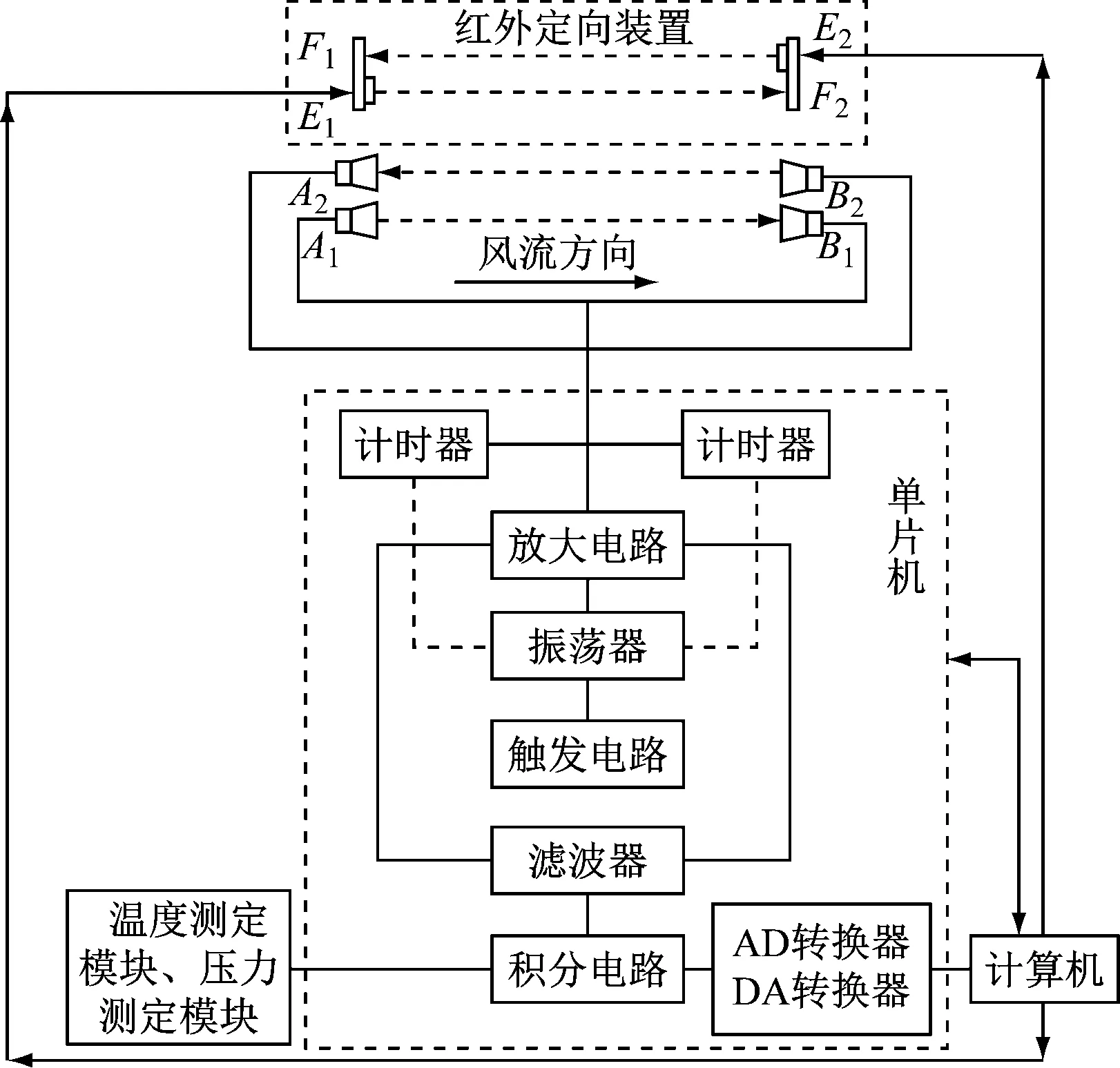
图2 超声波风速测量仪工作原理Fig.2 Working principle of ultrasonic anemometer
风速测量仪由单片机、超声波收发模块及红外定向装置等组成。单片机集放大电路、计时器、振荡器、触发电路、滤波器、积分电路、信号转换器于一体,完成时差法风速测量。红外定向装置由红外线发射器E1,E2及标志区F1,F2组成,位于超声波探头A2,B2上方。E1,E2分别发射红外线至对面标志区F1,F2,进行风速测量仪安装方向校准,以减小由安装方向偏离引起的测量误差。
风速测量仪工作电压为5 V,通过触发电路触发振荡器,产生具有一定频率的脉冲信号,激励超声波发射探头发射规定频率的超声波,即将电信号转换为超声波信号。在发射超声波的同时,单片机启动计时器。2个超声波接收探头接收超声波信号,并将其转换为电信号输入单片机,同时中断计时器。信号经过放大、滤波处理后,再经过积分电路处理成方波。低电平持续时间就是超声波在空气中的传播时间,在顺风与逆风条件下低电平持续时间不同,由此可计算出超声波传播时差,根据式(5) 可计算出风速并判断风向,然后实时输出风速。
2.2 超声波信号调理
超声波信号调理是指对超声波信号进行与或非逻辑运算。对振荡器产生的电信号进行信号处理及门电路运算,得到传播时间差造成的脉冲宽度,再通过滤波器及积分电路将电信号转换为稳定的输出电压。
超声波风速测量仪信号调理如图3所示。超声波风速测量仪由IO口输出一个10 μs的高电平信号至TRIG(控制端),激励超声波发射探头A1,B2发射8个40 kHz方波(波形O),同时A1和B2的TRIG输出一个低电平。B1接收到A1发射的超声波后,换能器产生脉冲信号a,同时发生电平跳变,从B1的ECHO(接收端)输出一个高电平,经积分电路整形为方波(波形P)并存储,低电平宽度为超声波在顺风条件下的传播时间T1。A2接收到B2发射的超声波后,换能器产生脉冲信号b,同时发生电平跳变,从A2的ECHO输出一个高电平,经积分电路整形为方波(波形Q)并存储, 低电平宽度为超声波在逆风条件下的传播时间T2。图3中,Tr为超声波风速测量仪的1个发射周期,即从超声波发射探头A1,B2第1次发射8个40 kHz方波到第2次发射方波的时间;T0为待机时间,即超声波发射探头发射8个40 kHz方波后至下一次发射的等待时间。
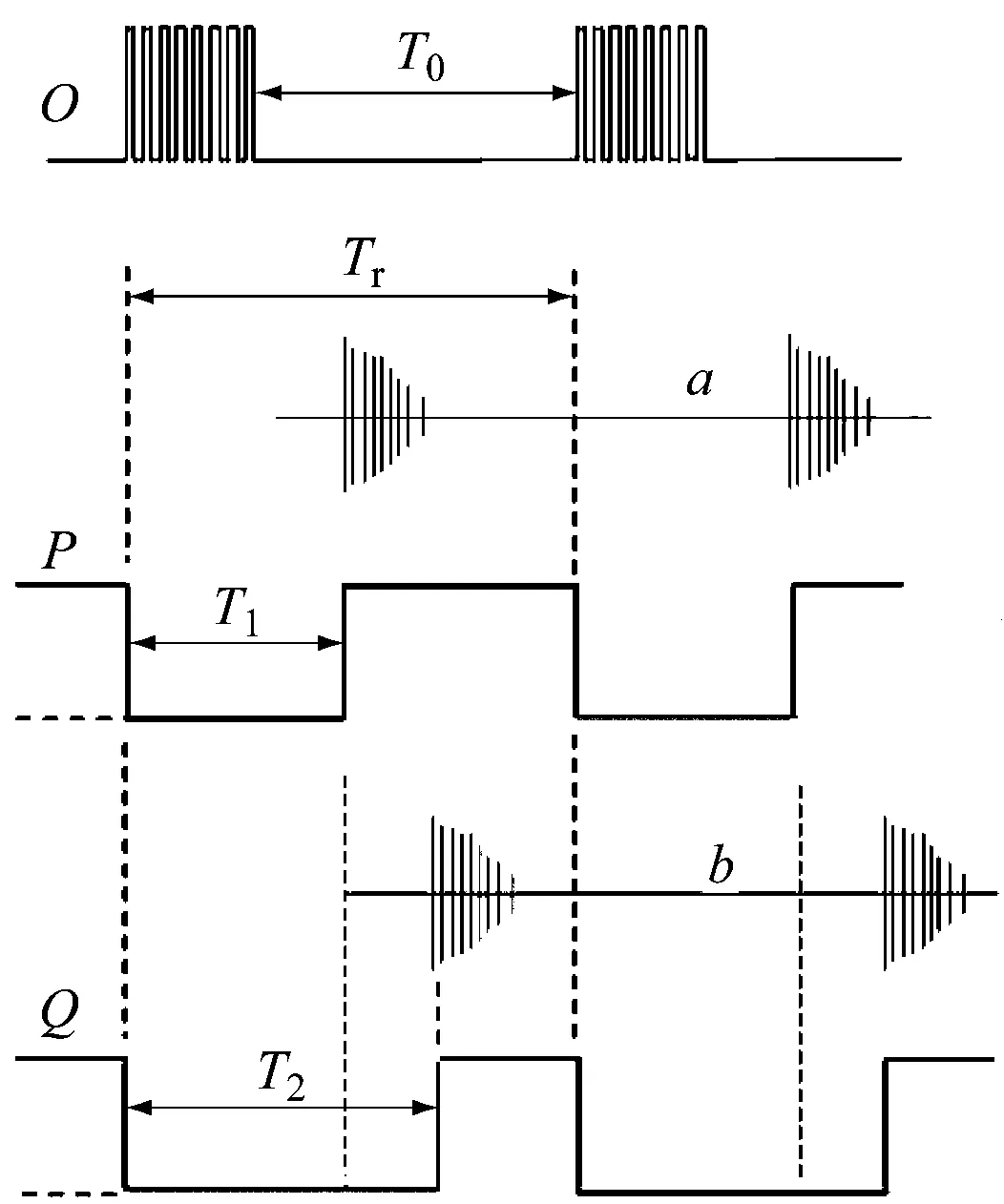
图3 超声波风速测量仪信号调理Fig.3 Signal conditioning of ultrasonic anemometer
3 性能参数设定及其影响因素分析
超声波风速测量仪的测量精度除了受频率、待机时间等性能参数影响外,还受探头方向、声噪声等因素干扰。
3.1 超声波频率
超声波在空气中传播的过程中,强度会随距离增大而衰减,频率越高,衰减率越大,长距离测量越困难;但低频超声波的工作噪声较大,易对测量精度产生影响。按照图1所示的超声波风速测量仪布置方式,10 m以内的测距基本可以满足井下巷道测风要求。根据理论和实践经验,10 m以内测距最适宜的超声波频率为40 kHz[16],因此,本文选用特性频率为40 kHz的超声波换能器。
3.2 待机时间
若超声波风速测量仪待机时间过短,则测量空间内发射探头的余振、回响信号等声噪声会降低测量精度;若待机时间过长,则测量响应速度慢。因此,需设置合理的待机时间。设探头间距L=10 m,α=0,空气温度t=0 ℃,巷道平均风速vm=10 m/s,考虑反射波的影响,超声波从发射到返回所需的传播时间为
(7)
由式(7)可知,待机时间大于60 ms时,可避免反射波的影响。若探头间距L=1 m,则待机时间应大于6 ms。
设定探头间距L=1 m,待机时间分别为50,100,200 ms,连续进行300次测试,风速标准差及风速波动范围见表1。可以看出,当待机时间大于超声波折返所需传播时间时,风速标准差很小,实测值波动小,表明测量稳定性好,几乎不受待机时间的影响。考虑风速测量仪的响应速度,设定待机时间为100 ms。
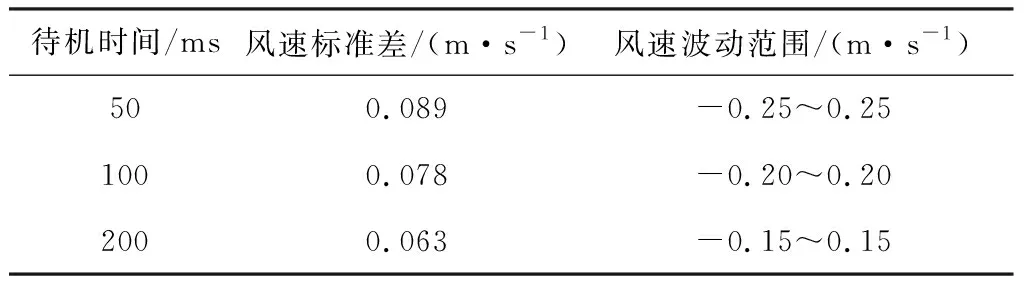
表1 不同待机时间的风速标准差及波动范围Table 1 Standard deviation and fluctuation range of wind speed under different stand-by time
3.3 超声波探头方向性
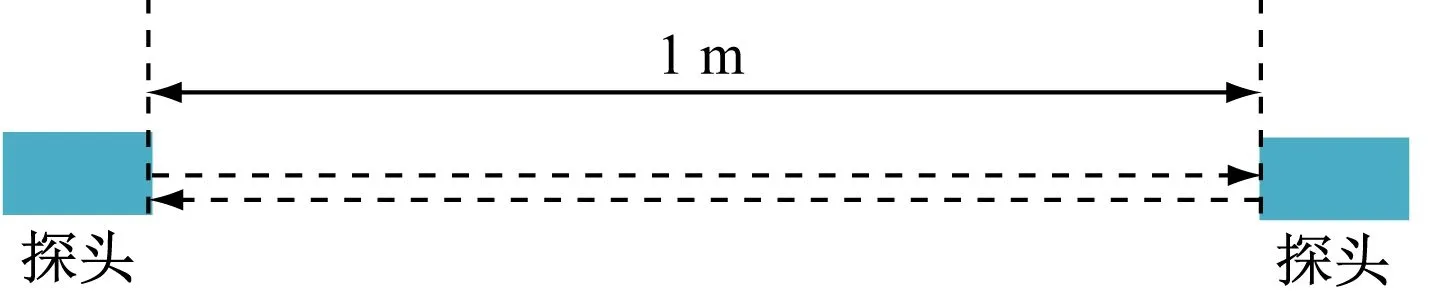
超声波具有良好的方向性,超声波场中至波源充分远处同一横截面上各点的声压不同,轴线上的声压最高[17]。一般实用性的超声波探头半扩散角为4~15°,即测距为1 m时,超声波探头方向的最大允许错位为0.268 m。因此,设超声波探头方向错位0.25 m,采用4种布置方式进行室内实验,如图4所示。超声波连续发射100次。
(a) 布置方式1

(b) 布置方式2

(c) 布置方式3

(d) 布置方式4
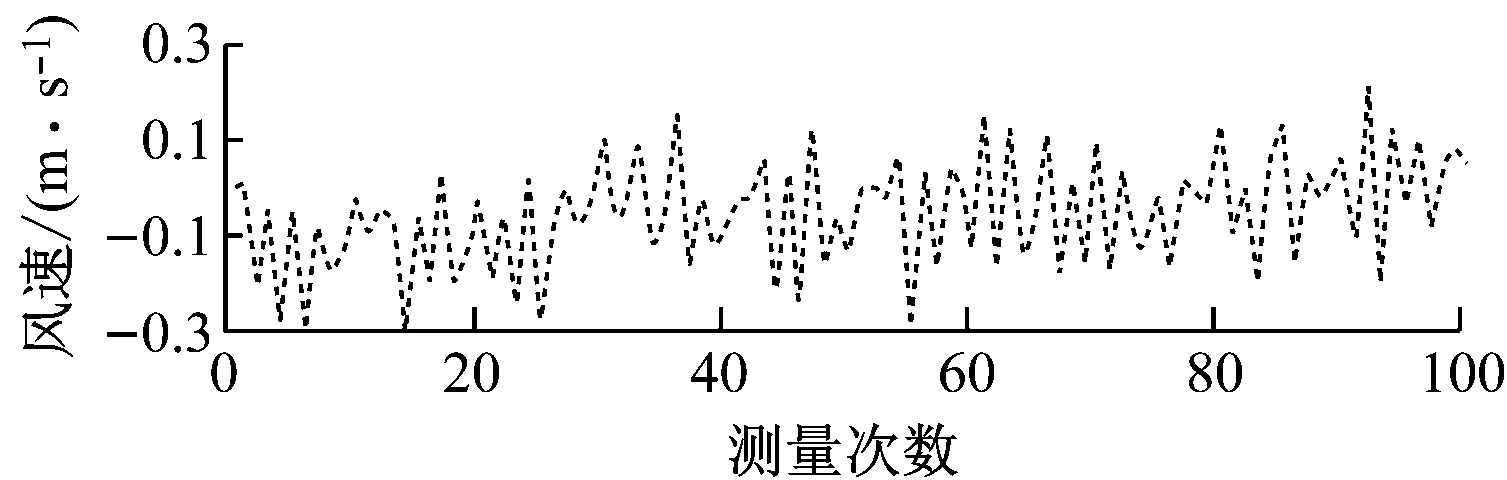
不同超声波探头布置方式的实测风速如图5所示,风速标准差及波动范围见表2。
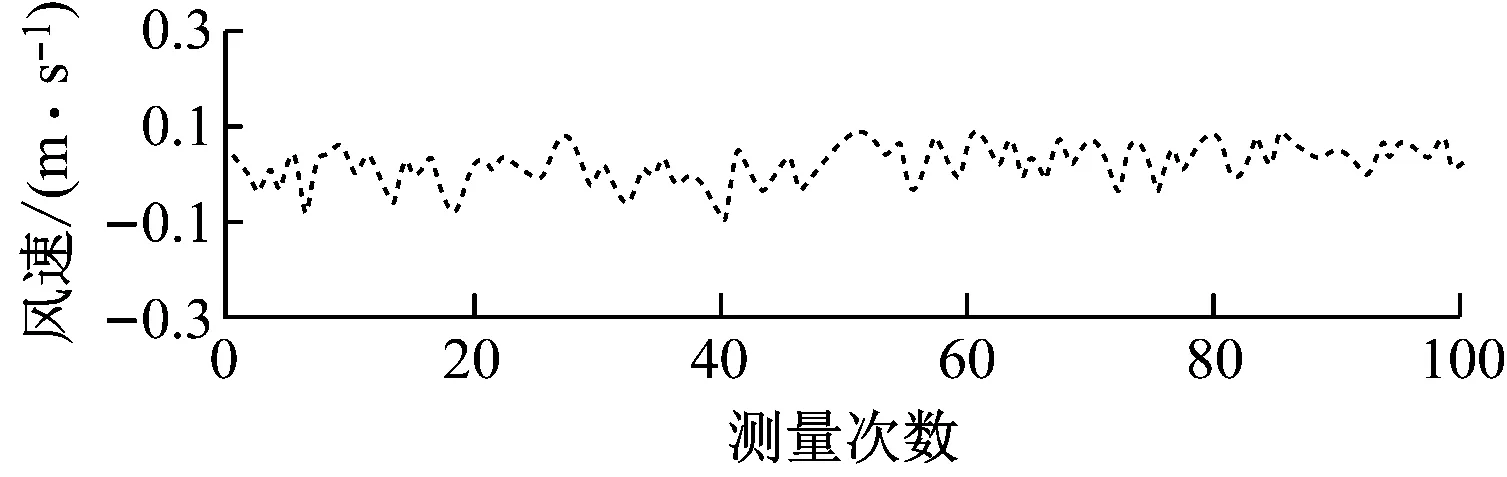
(a) 布置方式1实测风速
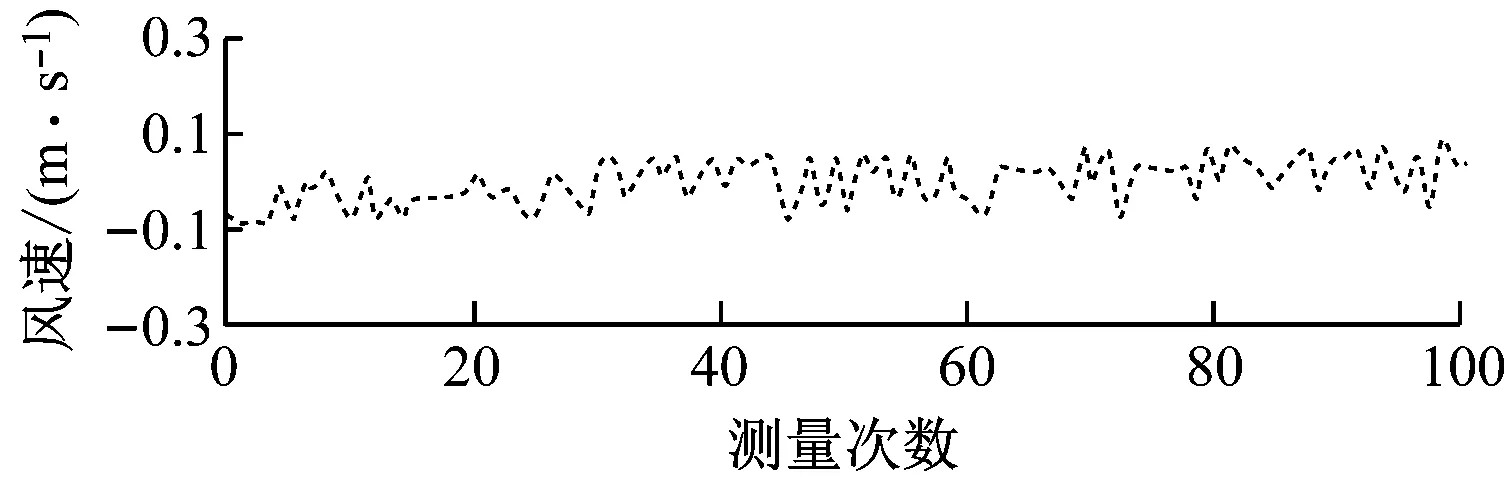
(b) 布置方式2实测风速
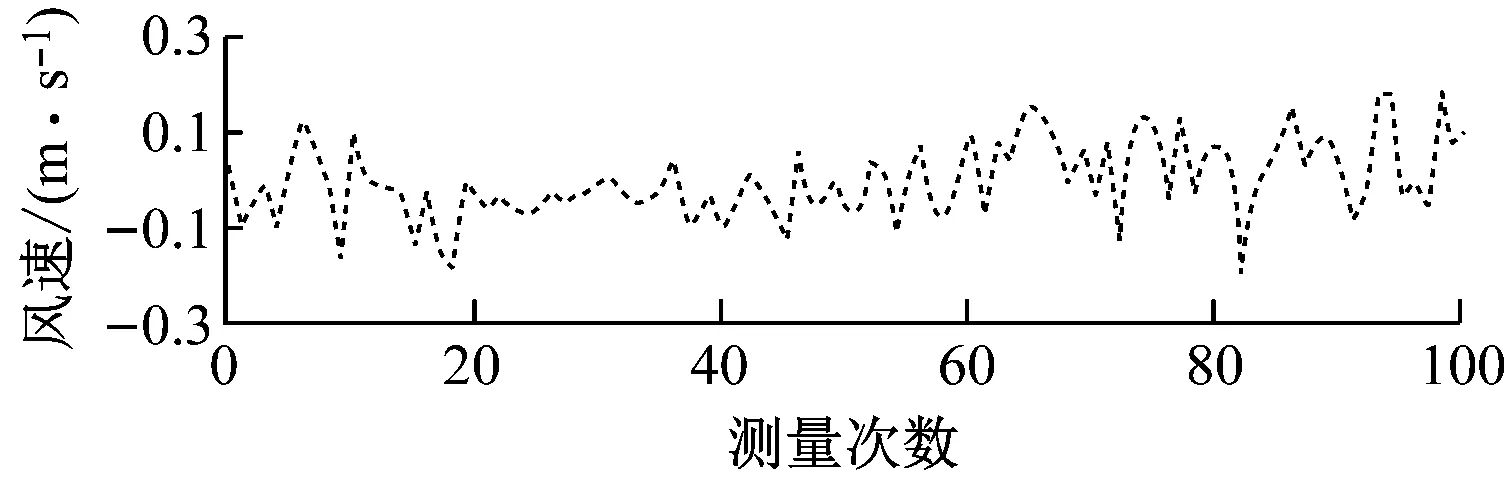
(c) 布置方式3实测风速
(d) 布置方式4实测风速
从图5和表2可看出,超声波探头方向错位越严重,风速标准差和波动范围越大,表明探头方向对测量的准确性与可靠性有一定影响。为减小探头方向错位造成的误差,本超声波风速测量仪设置了红外定向装置。
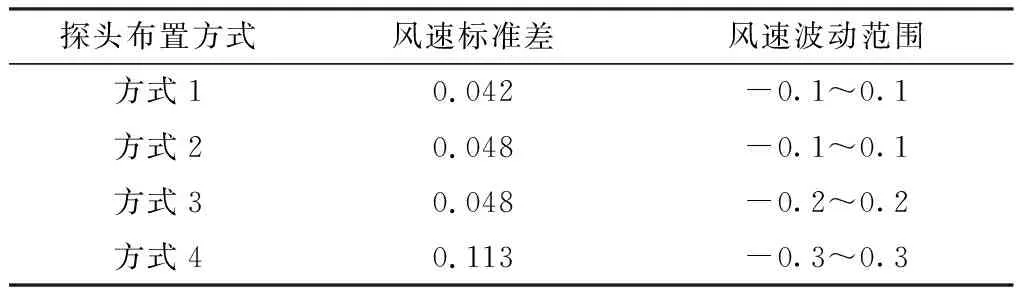
表2 不同超声波探头布置方式的风速标准差及波动范围Table 2 Standard deviation and fluctuation range of wind speed under different ultrasonic probe arrangements m/s
3.4 数据平滑处理
对原始风速波形曲线进行平滑处理的目的是消除随机噪声,提高输出风速的稳定性。通过比较分析,本文选用滑动平均法,其原理是对n个非平稳数据{yi}(i=0,1,…,n-1),逐个滑动取m个相邻数据计算算术平均值:
(8)
式中:fk为第k个算术平均值;yk+i为原始风速测量值。
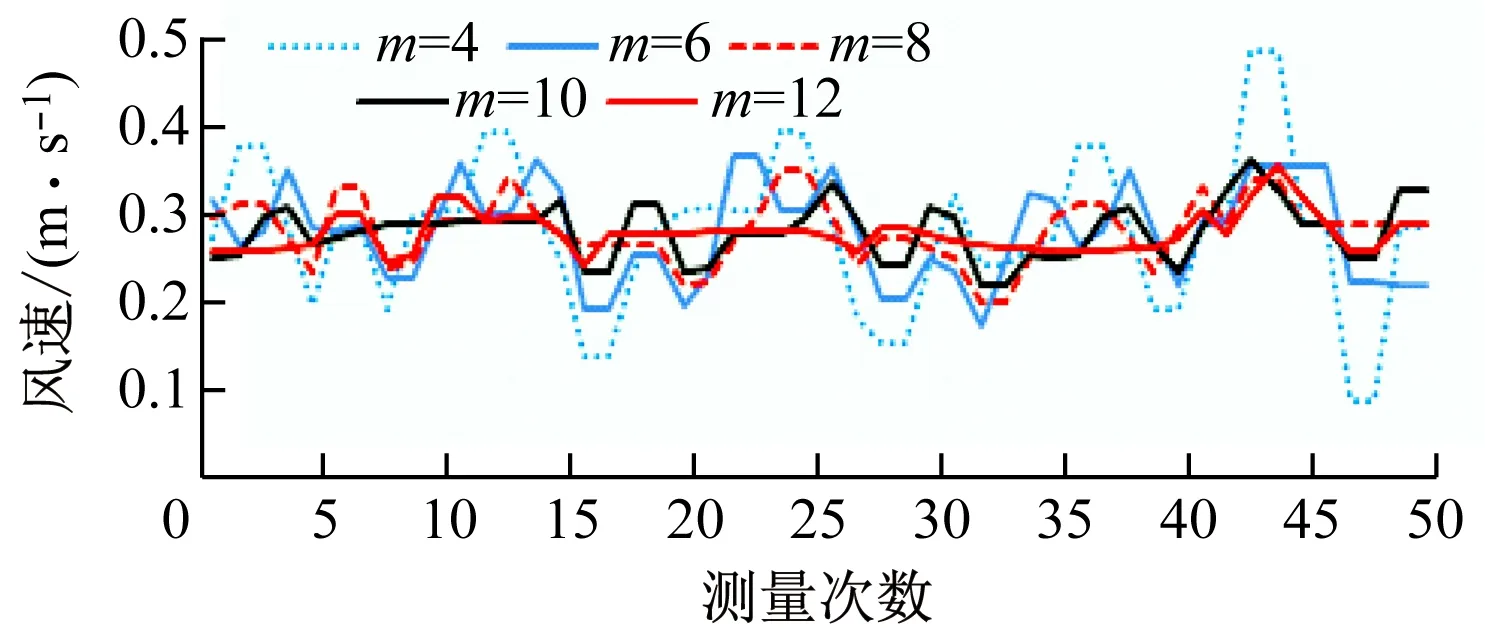
m的取值直接影响平滑效果:m值较大有利于抑制频繁随机起伏的随机误差,但可能导致高频变化的确定性成分被平均;m值较小不利于抑制随机误差。数据处理中多设置m值为5~11。为确认m值对风速波形曲线平滑效果的影响,分别取m值为4,6,8,10,12,对测距1.0 m的原始风速波形进行数据平滑处理,结果如图6所示。

(a) 原始风速波形
(b) 平滑处理后波形
m值与风速标准差的关系如图7所示。可以看出,m值越大,风速标准差越小,风速变化范围越小,风速越稳定,但风速测量仪响应速度变慢。当m≥8时,风速标准差变化小,可以认为m对风速平均值的影响很小,因此,本文取m=8进行数据平滑处理。
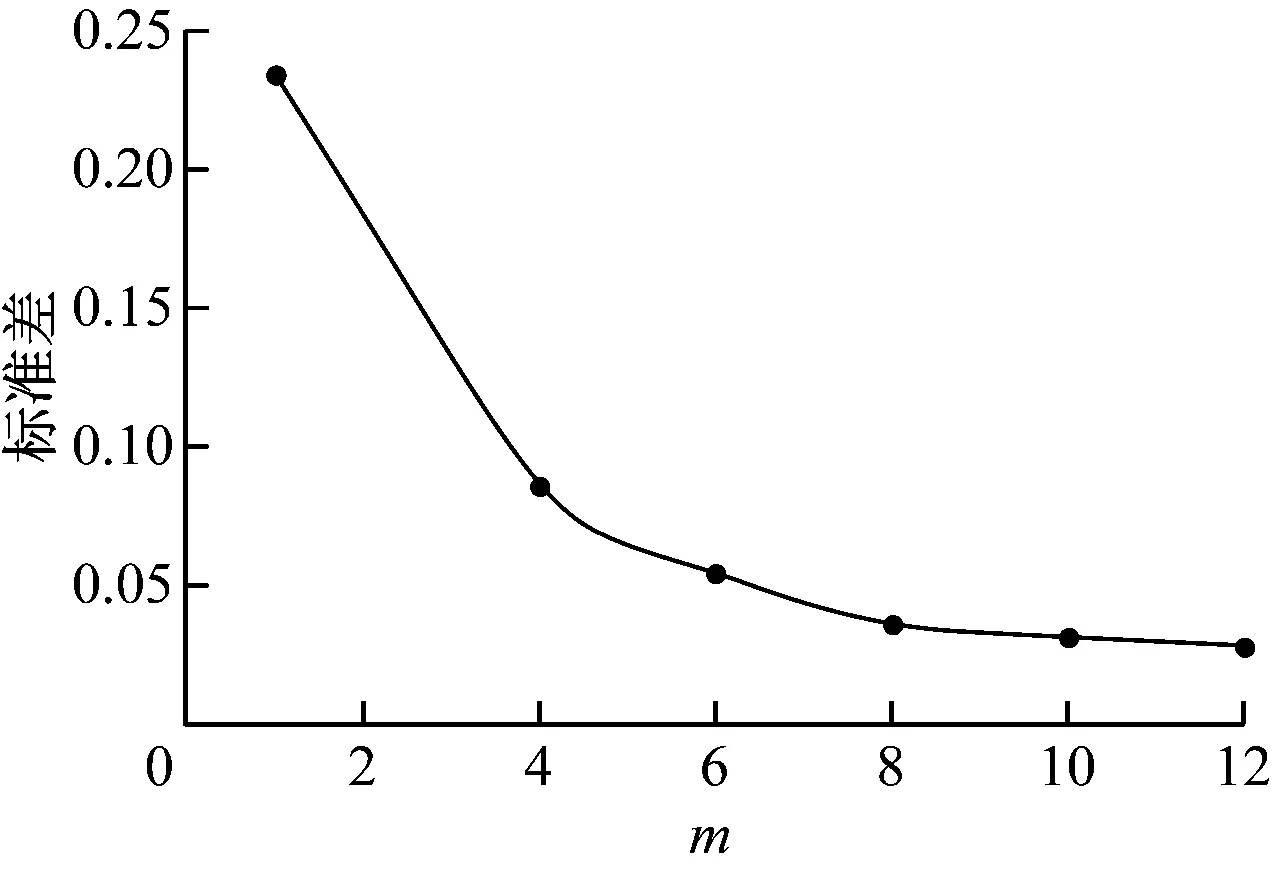
图7 m值与风速标准差的关系Fig.7 Relation between m and the standard deviation of wind speed
4 性能指标分析
(1) 分辨率。设α=0,对式(5)求T1的导数,得
(9)
(10)
已知超声波风速测量仪计时器的分辨率为1 μs,设L=5 m,C=340 m/s,vm=5 m/s,代入式(10)得dvm=0.011 9 m/s,即超声波风速测量仪的测量分辨率为0.01 m/s。
(2) 测量误差。已知超声波探头的测距误差|dl|≤3 mm,换算为超声波传播时间误差得
(11)
将dT1代入式(10)得dvm=0.103 m/s,则超声波风速测量仪误差为0.1 m/s。
(3) 启动风速。因为采用非机械式传动方式,理论上超声波风速测量仪的启动风速应该等于其分辨率。根据实验室内无风、微风状态的实测,在风速小于0.1 m/s的情况下,超声波风速测量仪均获得了稳定的实测值,证明其启动风速低于0.1 m/s。
5 结论
(1) 基于超声波时差法风速测量原理,设计了具有低启动风速的高精度矿用超声波风速测量仪。通过2个发射探头同时发射超声波,形成2个超声波传播通路,温度对风速测量的影响可以忽略不计。
(2) 采用红外定向装置,可减小超声波探头方向错位引起的测量误差。选用滑动平均法对原始风速波形曲线进行平滑处理,以消除随机噪声,提高输出风速的稳定性。
(3) 理论计算和实验结果表明:该风速测量仪的分辨率为0.01 m/s,测量误差为±0.1 m/s,启动风速低于0.1 m/s,可以满足矿井低风速条件下的精准测风要求,今后将通过实践进行进一步验证。
