针对合作型无人机的最优防相撞策略
2022-03-02张宏宏甘旭升孙静娟陈致远
张宏宏,甘旭升,孙静娟,王 宁,陈致远
1.空军工程大学 空管领航学院,西安710051
2.国家空管防相撞技术重点实验室,西安710051
近年来随着无人机(unmanned aerial vehicle,UAV)在军事、农业、科技等领域广泛应用[1],无人机离开“隔离空域”,进入低空融合空域执行多样化任务已成为趋势,无人机冲突解脱也变得至关重要。面对融合空域内飞行环境的复杂性与高度不确定性,无人机的自主避障技术逐渐成为关键技术之一[2-3]。与有人机相比,无人机载荷小,机动性强,动力学模型较为复杂,空域内面临的威胁不确定性更高,解决低空融合空域内无人机冲突解脱问题对当前无人机安全运行具有重大意义[4]。
目前,无人机冲突解脱算法主要分为以下两类:(1)非合作式避障,核心在于无人机利用自身传感器,获取周围环境信息,实现对入侵障碍物的感知与定位,并执行避障策略,保证飞行安全。其中几何法[5-9]是利用冲突双方的位置与速度等信息,计算冲突双方的几何关系,并通过设计控制律,实现空域内避障功能。势场法[10-11]是将冲突方放置在虚拟势场中,智能体之间在引力与斥力的作用下,实现冲突消解,并向目标点靠近。(2)合作式避障,核心在于无人机与入侵障碍物共享位置、速度、航向等信息,并利用共享信息设计控制律,从而避免相撞。其中常用的方法有分布式多Agent 系统[12-13]、复杂网络[4,14]等。与非合作避障方式相比,合作式避障从冲突整体的角度进行考虑,保证解脱过程的全局最优,避免支付代价过大。
无人机冲突解脱与有人机类似,但由于其在复杂融合空域下面临的不确定性增大,现有解决方案存在以下缺点:(1)对数据链通信可靠性要求较高,无人机状态实时控制调整机动,稳定性差;(2)单独改变速度或航向进行冲突解脱研究较多,速度与航向同时改变进行避撞研究较少;(3)对非合作冲突解脱算法研究多,对冲突双方合作博弈解脱研究较少,不能保证整体解脱利益最优。
基于此,本文针对融合空域内无人机飞行冲突的特点,基于无人机实时控制与最少机动的原则,根据速度障碍算法,提出了基于合作博弈的无人机冲突解脱模型,在支付代价最小前提下实现无人机避撞功能。
1 基于有限时间速度障碍法的探测模型
融合空域内无人机在执行任务状态时,自身的航向和速度在收到控制指令之前保持匀速直线运动的状态不变。速度障碍法以空域内无人机的相对飞行速度为研究对象,UAV1 相对于UAV2 空间关系如图1 所示。以UAV2 为圆心,无人机的安全间隔d为半径,围成的圆为UAV2的安全圆,从UAV1的中心A点引出两条切线与UAV2的安全圆相切,如果两架无人机的相对速度为vR=v1-v2所在直线lA与⊙O相交时,表示无人机之间存在冲突。
由于该模型只考虑相对速度与圆锥之间的几何关系,融合空域内任何两架存在冲突的航空器都需要进行冲突解脱,算法较为复杂,过早进行冲突解脱也会造成空域资源的浪费。现提出基于时间约束的速度障碍模型,引入时间参数τ,即在设定的时间τ内,无人机之间会产生飞行冲突。以O′为中心,d/τ为半径,使得AO=τAO′,当存在λ∈[0,1],使得,两架无人机在λτ<τ的时间内存在冲突,此时,即当且仅当vR位于该红色区域时,冲突才会发生。通过调整v1和v2的大小与航向,保证相对速度在障碍区之外,从而进行冲突解脱。相对于传统距离解脱算法,基于有限时间的速度障碍探测模型能够考虑到冲突双方的速度、反应时间等因素,能够最大限度利用空域资源[15]。
以UAV2的中心O点为原点,两无人机之间连线所在直线为x轴,垂直两机连线的直线作为y轴,建立惯性直角坐标系,如图2所示。两无人机与它们之间连线的航向夹角分别为θ1和θ2,两机之间解脱距离为D0,两机之间连线与障碍区域边界的夹角为α,相对速度vR所在直线与两机之间夹角为γ,与障碍区域边界的夹角为β,与v2的夹角为ε1。若两机不进行冲突解脱,两机按照原航线飞行的最小间隔为dmin,根据相对速度的物理意义,UAV2到相对速度vR所在直线的最小距离也为dmin。

图2 飞行状态示意图Fig.2 Schematic diagram of flight status
根据图2的几何关系,得出两机连线与障碍区域边界的夹角:

则经过t时间后,两无人机之间的距离为:

为简化表达式,令:

则t时间后,两无人机之间的距离表示为:

一般来说,(Δvx)2+(Δvy)2≠0,两无人机之间的距离D2(t)为一条抛物线,若ΔxΔvx+ΔyΔvy<0,则两无人机之间的距离逐渐减小,有可能发生飞行冲突。为求出两机的最小距离,令dD2(t)/dt=0,求得t代入距离公式,得到两无人机之间最小距离为:

根据图2中的几何关系,可计算出:

根据速度障碍法原理,即当α>γ时,无人机之间存在飞行冲突,α≤γ时,无人机之间不存在飞行冲突。
2 冲突解脱模型
2.1 合作博弈的概念
博弈论是常用于解决理性决策者之间冲突与矛盾问题的理论[16]。合作博弈是基于联盟内部可以进行信息互通以及决策者之间存在约束力为前提条件的博弈类型,博弈方之间通过相互合作形成联盟,强调集体主义和团体理性[17]。合作博弈的求解原则就是维护联盟利益的前提下保证参与者获得更高收益。本文以无人机冲突方获取更多利益作为有约束力的协议,冲突解脱方采用合作博弈控制方法。双机飞行冲突背景下,单机机动避让的支付代价往往较大,双机同时机动避撞时,联盟福利最优解配置的公平性与整体效益性是统一的[18]。
2.2 基于合作博弈的冲突解脱模型
博弈论的3 个基本要素为:博弈方、博弈策略和目标函数[19]。
2.2.1 博弈方
博弈方是指博弈过程中具有决策权的参与方。本文中的博弈方为无人机冲突解脱方,分别以UAV1、UAV2表示博弈双方。
2.2.2 博弈策略
博弈策略是博弈方可以选择的策略集合。如图3所示,通过调整v1和v2的大小与方向来保证vR位于障碍区域之外,c为vR距离障碍区域最近的修改速度,根据速度障碍法原理,需要修改的c由冲突解脱博弈双方共同承担,博弈双方各自选择自己的调整速度进行冲突解脱。对于UAV1来说,v1修正速度对应的半平面由以下公式定义:

图3 博弈双方可以选择的策略集合Fig.3 Sets of strategies chosen by both sides of game

同样对UAV2来说,v2修正速度对应的半平面由以下公式定义:

如果将修改后的速度v1和v2放在这两个半平面上,新的相对速度就跳出了障碍区域,解决了冲突。基于无人机速度改变量尽量小的原则,修改后的速度v1和v2分别在半平面的边界线上选择解脱策略。
融合空域内无人机为达到冲突解脱的目的,可以通过调整速度大小或者改变航向的方式进行冲突解脱,由于无人机具有机动性强、操作便捷的特点,通过航向与速度共同调整的混合解脱方式可以更好达到解脱效果。下面通过公式推导进一步说明无人机可调速度大小与航向的关系。
对于无人机UAV1,如图4所示,M1点为v1在障碍边界的投影点,N1为v1的终点,冲突解脱调整后的相对速度与的夹角为,无人机航向调整量分别为Δθ1、Δθ2,在无人机未进行冲突解脱前的速度矢量三角形中,由几何关系得:

图4 UAV1博弈方速度调整示意图Fig.4 Schematic diagram of UAV1 game side speed adjustment

由正弦定理得:

在△AM1N1中,由几何关系得:


解得UAV1速度调整量Δv1与航向调整量Δθ1之间的关系为:

无人机航向调整量Δθ1、Δθ2的关系由几何关系得:

在无人机冲突解脱调整后的速度矢量三角形中,由正弦定理得:

对于无人机UAV2,如图5所示,M2点为v2在障碍边界的投影点,N2为v2的终点,等参数计算方式与UAV1基本一致,现在对计算方式不同的参数进行说明。
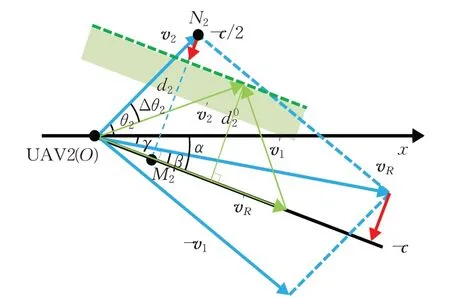
图5 UAV2博弈方速度调整示意图Fig.5 Schematic diagram of UAV2 game side speed adjustment
在△OM2N2中,由几何关系得:


解得UAV2 速度调整量Δv2与航向调整量Δθ2之间的关系为:

由于无人机在运行过程中,受自身性能的影响,其自身速度调整量与航向调整量均有限制,需要满足以下公式:


同时满足无人机航向调整量与速度调整量性能的可选速度决策集为重合阴影部分,无人机可以选择速度决策集合中的任一速度进行冲突解脱。如图6、图7 所示,UAV1博弈方可选速度调整策略为图6重合阴影部分,UAV2博弈方可选速度调整策略为图7重合阴影部分。
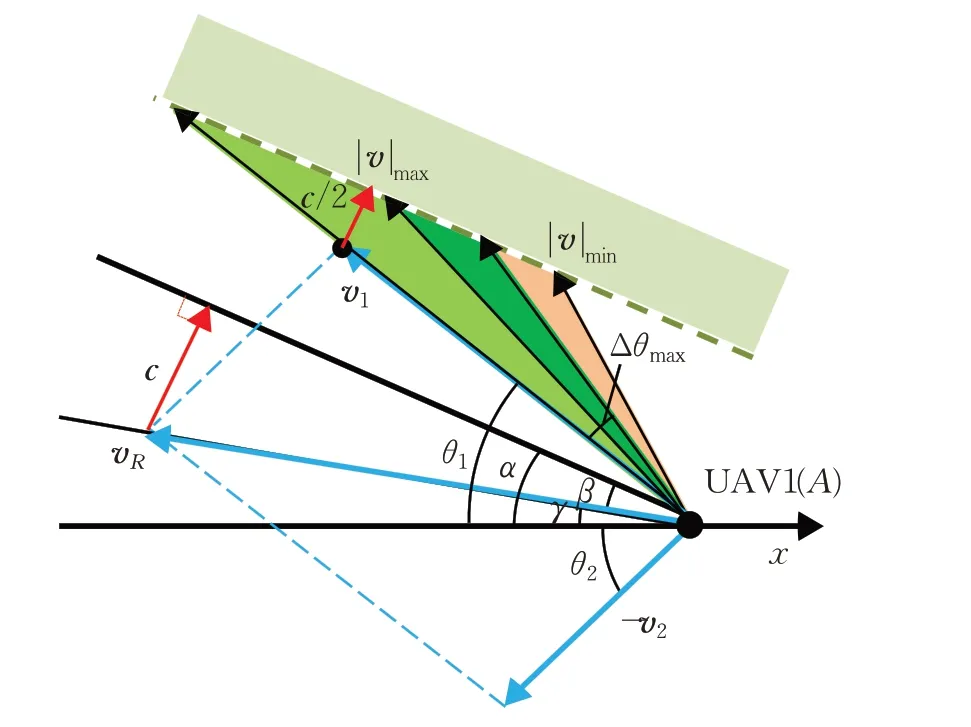
图6 UAV1博弈方可选速度调整策略(重合阴影部分)Fig.6 UAV1 game side optional speed adjustment strategy(overlapped shadow part)

图7 UAV2博弈方可选速度调整策略(重合阴影部分)Fig.7 UAV2 game side optional speed adjustment strategy(overlapped shadow part)
根据式(15)、(20),分析得无人机的航向调整量与速度大小调整量存在一一对应的关系,可将无人机速度调整量的约束转换为无人机航向调整量的约束,从而降低计算复杂度,双方的博弈策略集转化成航向变化量集合。
2.2.3 目标函数
目标函数也称为性能指标,用来衡量博弈双方的收益。在冲突解脱过程,主要是由避让支付的代价决定的。对于博弈方来说,冲突解脱过程中所需支付的威胁代价主要由时间延迟、航向改变量决定,下面分别对各支付代价指标进行说明。
(1)时间延迟指标。如图8所示,相对速度所在直线与无人机安全圆相切点为E点,无人机中心O与冲突解脱前的相对速度vR所在直线垂直于Q点,并延长交解脱后相对速度所在直线于P点,无人机的冲突解脱航线为AP,无人机按照相对速度飞行到P点后,进行航迹恢复,航迹恢复点为A′。

图8 时间指标示意图Fig.8 Schematic diagram of time index
根据图8中几何关系,无人机冲突解脱相对飞行距离S为:

冲突消解时间tm为:

AP段航线实际长为v1tm,由于冲突解脱造成的时间延迟为:

时间延迟越小,冲突解脱的支付代价越小,效用函数u1(t)可表示为:

(2)航向调整量指标。博弈方航向调整量也为影响支付代价的关键指标,无人机航向调整量越大,越不利于安全运行,博弈方支付代价更大。效用函数u2(t)可表示为:

(3)综合指标。综合考虑时间和航向调整量的指标,提出综合目标函数u3(t,θ1)为:

在无人机进行博弈解脱过程中,所有博弈方I={i|i∈[1,N]} 的解脱策略组成的集合S(isij∈Si表示第i个博弈方采用第j个策略),每场博弈局中,博弈方通过信息互通与相互约束,分别选择合适的策略(s1,s2,…,sN),支付相应的代价为ui(i=1,2,…,N),联盟福利函数为:

式中,Wj为第j个策略组合得到的收益,即为联盟福利;uij为第i个博弈方采用第j个策略得到的博弈方收益;ki为权重,反映各博弈方对联盟福利的重要程度。通过合作博弈,最终选择最佳决策策略(),获得最大的联盟福利[18]。
2.3 针对合作型无人机最优防相撞流程
融合空域内飞行的无人机通过自身雷达设备不断探测周围的物体运行信息(速度、位置、航向),通过航迹预推模型判断无人机之间是否存在冲突,若不存在冲突,无人机保持当前参数继续运行,若存在冲突,冲突双方计算联盟福利函数以及双方解脱策略,通过最优化理论计算出双方最优解脱策略。本文采用有约束的最优化函数fmincon来实现求解过程。
针对合作型无人机最优防相撞策略转化为以下最优化问题。

其中,θi与,i=1,2 分别表示无人机冲突双方的航向与速度。
基于合作博弈的无人机冲突解脱流程如图9所示。

图9 基于合作博弈的冲突解脱流程图Fig.9 Conflict resolution flow chart based on cooperative game
3 仿真分析
为验证本文提出的无人机冲突解脱策略的有效性、实时性与高效性,运用Matlab2018a 环境对具体冲突解脱场景进行仿真。根据融合空域内无人机飞行特性与相关空中交通管理规定,假设无人机安全间隔d为20 m,航向调整范围为Δθ∈[-π/6,π/6],速度性能约束范围为v1,v2∈[13,18]。为了避免τ设置过高导致高流量融合空域内算法效率太低,以及τ设置过小来不及冲突解脱的极端情况,时间约束参数τ设置为8 s。
为验证冲突解脱算法的有效性,选取航迹交叉角分别为锐角、直角和钝角三种冲突类型进行博弈,博弈双方的初始位置、航向、速度等信息假设通过无人机机载雷达设备可以实时获取,具体数据由表1列出。

表1 冲突双方初始信息Table 1 Initial information of both sides of conflict
场景1为无冲突博弈情景,博弈双方初始位置分别为(100,0)、(0,200),航向分别为75°、15°,速度分别为16 m/s、14 m/s,仿真步长为0.01 s。通过对博弈双方的飞行信息进行计算,得到α≤γ,根据速度障碍法原理,双方不存在飞行冲突,按照原定航线继续运行。双方轨迹图以及实时间隔如图10所示。从无人机运行间隔来看,双机的实际距离始终大于安全间隔,说明场景不需要进行冲突解脱。

图10 场景1冲突解脱示意图Fig.10 Scenario 1 conflict resolution schematic
场景2为航迹交叉角度为锐角的冲突类型情景,博弈双方初始位置分别为(100,0)、(0,100),航向分别为75°、15°,速度分别为16 m/s、14 m/s,仿真步长为0.01 s。当无人机受航向调整量与速度改变量性能指标影响时,UAV1可选冲突解脱角度范围为Δθ1∈[-6.1,27.8],UAV2可选冲突解脱角度改变范围为Δθ2∈[-23.6,10.3],通过最优化理论求解出UAV1、UAV2 最优解脱角度改变量分别为-6°、-24°。博弈双方轨迹图以及实时间隔如图11所示,若未进行冲突解脱,可以看出双机的实际间隔会小于安全间隔,而冲突解脱后双机间隔均大于安全间隔。
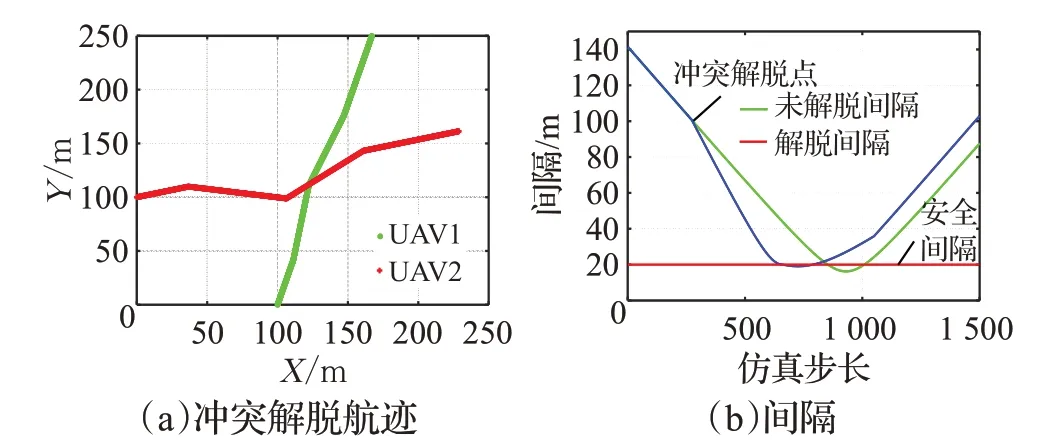
图11 场景2冲突解脱示意图Fig.11 Scenario 2 conflict resolution schematic
场景3为航迹交叉角度为直角的冲突类型情景,博弈双方初始位置分别为(100,0)、(0,100),航向分别为90°、0°,速度分别为16 m/s、16 m/s,仿真步长为0.01 s,当无人机受航向调整量与速度改变量性能指标影响时,UAV1可选冲突解脱角度范围为Δθ1∈[0.8,21.9],UAV2可选冲突解脱角度改变范围为Δθ2∈[-13.6,7.4],通过最优化理论求解出UAV1、UAV2 最优解脱角度改变量分别为1°、-14°。博弈双方轨迹图以及实时间隔如图12所示,若未进行冲突解脱,可以看出双机的实际间隔逐步减小到0,而冲突解脱后双机间隔均大于安全间隔。
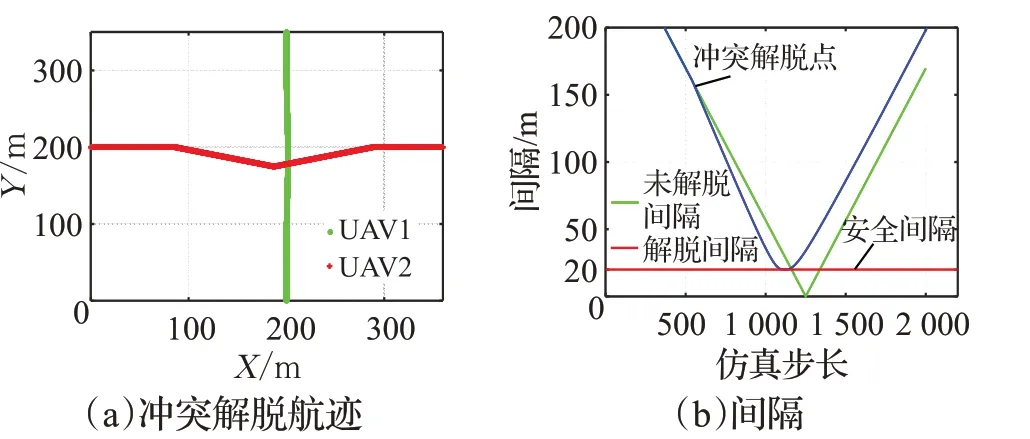
图12 场景3冲突解脱示意图Fig.12 Scenario 3 conflict resolution schematic
场景4为航迹交叉角度为钝角的冲突类型情景,博弈双方初始位置分别为(300,100)、(0,100),航向分别为165°、15°,速度分别为16 m/s、14 m/s,仿真步长为0.01 s。当无人机受航向调整量与速度改变量性能指标影响时,UAV1可选冲突解脱角度范围为Δθ1∈[2.1,6.9],UAV2可选冲突解脱角度改变范围为Δθ2∈[-7.8,-3.1],通过最优化理论求解出UAV1、UAV2 最优解脱角度改变量分别为2°、-8°。博弈双方轨迹图以及实时间隔如图13所示,若未进行冲突解脱,可以看出双机的实际间隔会小于安全间隔,而冲突解脱后双机间隔均大于安全间隔。
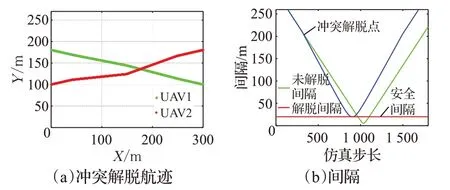
图13 场景4冲突解脱示意图Fig.13 Scenario 4 conflict resolution schematic
场景1~场景4 涵盖了复杂融合空域内双机冲突的基本类型,从仿真结果来看,冲突双方都能在自身性能指标的约束下进行选择解脱策略。同时在运行过程中,博弈双方之间始终保持在安全间隔之外,可以看出该冲突解脱算法具有有效性。无人机冲突解脱与恢复过程相关参数如表2所示。

表2 无人机冲突解脱与恢复过程相关参数Table 2 Relevant parameters of UAV conflict resolution and recovery process
为进一步说明该冲突解脱算法的实时性与高效性,选取最优策略求解时间、解脱时间、绕飞距离占比、机动次数等指标进行分析。以场景2为例,冲突解脱最优策略的求解时间为0.02 s,整个冲突解脱过程耗时1.00 s,根据式(25),整个冲突解脱过程延迟时间为0.055 7 s,文献[20]提出的基于速度障碍圆弧法避撞算法(非合作式避撞)延迟时间为0.009 4 s,本文提出的算法,博弈双方均只需机动两次便完成解脱过程。场景3、场景4延迟时间分别为0.089 0 s、0.028 6 s,具体数据见表3 所示。经分析可得,冲突解脱算法求解时间与解脱时间均比较小,满足解脱的实时性要求,同时延迟时间小,在满足无人机性能指标约束与运行安全的前提下,冲突解脱所需的支付代价较小。

表3 仿真结果关键指标Table 3 Key indicators of simulation results
将本文的解脱算法与文献[21-22]分别提出的基于改进烟花-蚁群混合避障算法、改进势场蚁群法避撞算法的关键参数进行比较,如表4 对比得出,本文提出的双机避撞算法求解时间远远小于传统启发式算法,且只需两次机动便可完成避障,可操作性强。
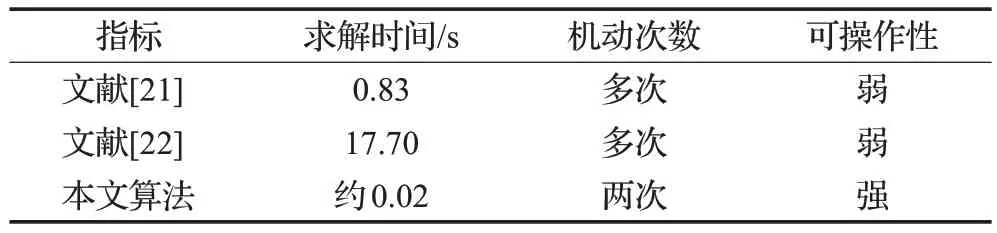
表4 算法结果比较Table 4 Comparison of algorithm results
4 结束语
本文针对融合空域内双机冲突类型,提出了合作博弈解脱模型,将联盟福利最优解作为飞行冲突解脱的最优策略,在满足无人机性能指标约束下,通过最优化理论进行解脱策略计算。无人机在满足最小机动的基础上,实现了实时冲突解脱。仿真结果表明:
(1)针对融合空域内不同冲突类型,本文算法都能找到博弈双方最优解脱策略,保证冲突双方实际运行距离都保持在安全范围以外。
(2)冲突方在自身机动性能约束下选择解脱策略,将速度大小改变量约束转换为航向变化量,快速计算出满足联盟最优福利的策略,满足实时性要求。
(3)相对于非合作解脱方式,基于合作博弈的冲突解脱算法能够均衡博弈方利益,保证联盟整体解脱支付代价最小的前提下,计算出最优解脱策略。
