一种基于折射率法检测海水盐度的装置设计
2022-03-02蔡元学秦月婷洪腾宇周寰宇李志成
蔡元学,马 天,秦月婷,洪腾宇,周寰宇,李志成
(1. 天津科技大学理学院,天津 300457;2. 天津科技大学海洋与环境学院,天津 300457)
海水盐度是衡量海水含盐量的一个标度,而海水含盐量是研究海水物理和化学过程的基本参数.对海洋中盐度及其分布的精确检测,在海洋学研究、海洋环境和气候的监测及预测[1]、海洋军事[2]、沿海采油、海洋渔业[3]等领域具有十分重要的实用价值.
目前国内外最常用的水体盐度探测方法多基于接触式或表面探测.如基于高精度电导率法的船载温盐深(CTD)仪[4-5]的盐度检测,该方法测量精度高,适用于现场连续检测,但是存在电导率、温度、深度3个参数检测不同步,电极易受水质污染和电磁干扰进而影响测量精度的问题;基于微波遥感技术[6-7]进行的航天观测可以大范围快速检测海水盐度,但是海水的微波辐射穿透能力较弱,所以只能检测海洋表面的盐度.
本文设计了一种基于折射率法检测海水盐度的装置.此装置可通过检测折射光线在不同盐度溶液中产生的偏移量,进而计算出海水盐度.盐度传感探头采用折射率差动测量和激光扩束的结构设计,在消除温度和深度对盐度检测影响的同时可进一步放大接收端光线的偏移量,提高系统分辨率,适合远海及深海定点式测量.
1 盐度检测系统设计
1.1 系统装置
光在不同盐度的液体中会发生折射,液体盐度的变化会引起液体折射率的变化[8],导致光线产生偏移.基于上述原理设计的盐度检测系统如图1所示.激光发射器发出的激光通过低损耗、低噪声和具有较高耐腐蚀性的光纤光缆传输到盐度传感探头测量单元,检测折射光线在不同盐度海水中与盐度几乎成正比的偏移量d,由CCD摄像器件通过多模光纤接收光信号的偏移量,通过信号处理电路将光信号转化为电信号传输到终端进行数据的分析和处理,最终得到待测海水的盐度值.
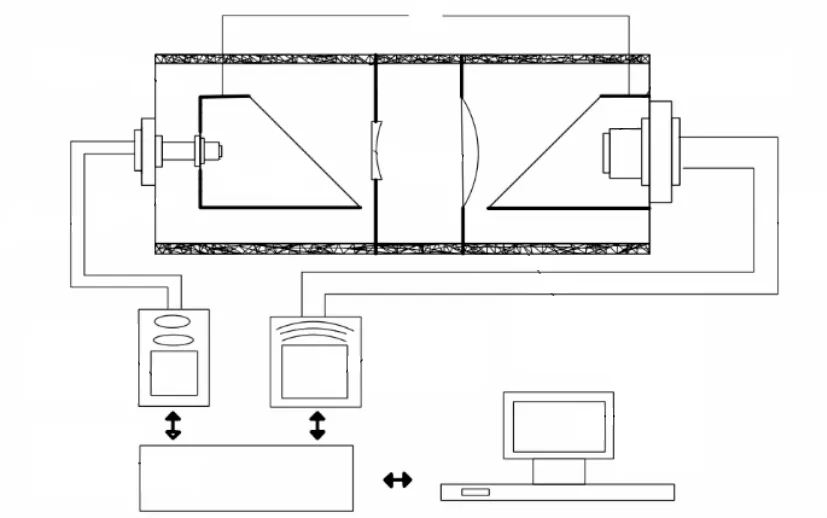
图1 盐度检测系统示意图Fig. 1 Schematic diagram of salinity detection system
1.2 盐度传感探头的特点
运用SolidWorks制作的传感探头三维仿真模型如图2所示.
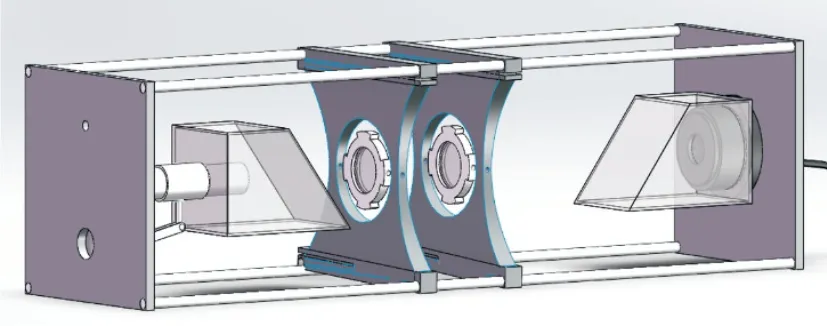
图2 传感探头三维仿真模型Fig. 2 Three-dimensional simulation model of sensor probe
传感探头主要分为两部分,一部分是封装有蒸馏水参考液的楔形水槽和待测液体槽,另一部分被称为激光扩束单元,由平凹透镜和平凸透镜构成.待测海水经过外侧由丙纶短纤维滤布和活性炭吸附膜构成的过滤单元进入外围的水槽中.
文献研究[9-11]表明温度对海水折射率有一定影响,因此探头的结构引入了参考液的设计,在同温、同压下同时检测激光在蒸馏水和待测液体中光线偏移量的差值,形成折射率差动测量[12-13],可以有效消除温度和深度对测量结果的影响.激光扩束单元这一结构的设计,一方面可以使光源与探测装置分布在两侧,减少光路因反射造成的光衰减;另一方面光线通过透镜后可以进一步放大出射光线的偏移量,提高系统的分辨率.
传感探头的结构设计与CTD仪和微波遥感技术相比可以有效消除温度和深度对盐度检测结果的影响,且检测环境具有普适性;此装置体积小、耐腐蚀、易拆卸,适合远距离深海定点式盐度的检测.
1.3 检测系统参数的设定
海水对光的吸收系数与波长有关,对于可见光而言,黄色物质对光的吸收占海水光吸收总量的65%以上,海水吸收系数的极小值在波长550nm左右;而在大洋表层水,极小值在波长510nm左右;在透明的深水中,极小值在波长470~490nm处,其吸收系数为0.02~0.05m-1[14].基于以上的经验数据和结论,传感器光源选用中心波长532nm的半导体激光器泵浦的固态激光器,并带有单模的尾纤输出.在单模光纤的端面耦合一个自聚焦透镜,对光线进行准直,以改善光线质量,提高测量的分辨率.
楔形水槽装满蒸馏水参考液并密封,顶面长宽均为35mm,底面长宽分别为70mm和35mm,楔形水槽高度为35mm,非倾斜部分壁厚2.5mm,倾斜部分壁厚2mm,倾斜部分与水平方向呈45°.透镜可选用焦距为2cm的平凹透镜和焦距为10cm的平凸透镜.在满足系统盐度检测范围(0~42‰)可以捕获光偏移量信号的前提下,若待检测液体盐度偏小,可选用小焦距平凹透镜和大焦距平凸透镜组合,反之,选用大焦距平凹透镜和小焦距平凸透镜组合,调整光在接收端的偏移量,以改善测量的准确度.
传感器的过滤单元选用300目的钛网作为骨架,丙纶短纤维滤布和活性炭吸附材料附着在网面,其作用是为了过滤海水中的泥沙,吸附有机物大分子,减小测量环境等客观因素对盐度检测结果的影响.
2 盐度检测系统的理论基础
盐度传感探头光路图如图3所示.光线在盐度传感探头中以水平方向入射,通过折射率为n0的蒸馏水参考液后以α角度入射到折射率为ng的楔形水槽斜玻璃面,折射后以β角度进入折射率为n的待测液体,再依次经过平凹透镜和平凸透镜,最后由CCD测得当被测液体分别是海水(光线1)和蒸馏水(光线2)时光线总偏移量d.L为光线1经过平凹透镜折射光线的反向延长线在焦平面的交点与主光轴的距离;L1和L2分别为光线1在被测液体为海水时进入平凹透镜和平凸透镜前的偏移量;f1和f2分别为平凹透镜和平凸透镜的焦距;α0为楔形水槽斜玻璃面倾斜角度,设计为45°;s1为楔形水槽倾斜玻璃面距平凹透镜的距离;s2为两透镜光心之间的距离,即为两透镜焦距之和;ω为入射光线与楔形水槽倾斜玻璃面法线的夹角;φ、θ均为折射光线与楔形水槽倾斜玻璃面法线的夹角.光线总垂直偏移量d的推导过程如下:
由折射定律可知

令过平凹透镜折射光线与水平方向的夹角为γ

由图3几何关系可知

由式(1)—式(3)整理得

令待测液体是海水时光线在进入楔形水槽斜玻璃面之前的偏移量为d1,由图3可知

令折射光线与水平方向的夹角为σ

由图3几何关系可知

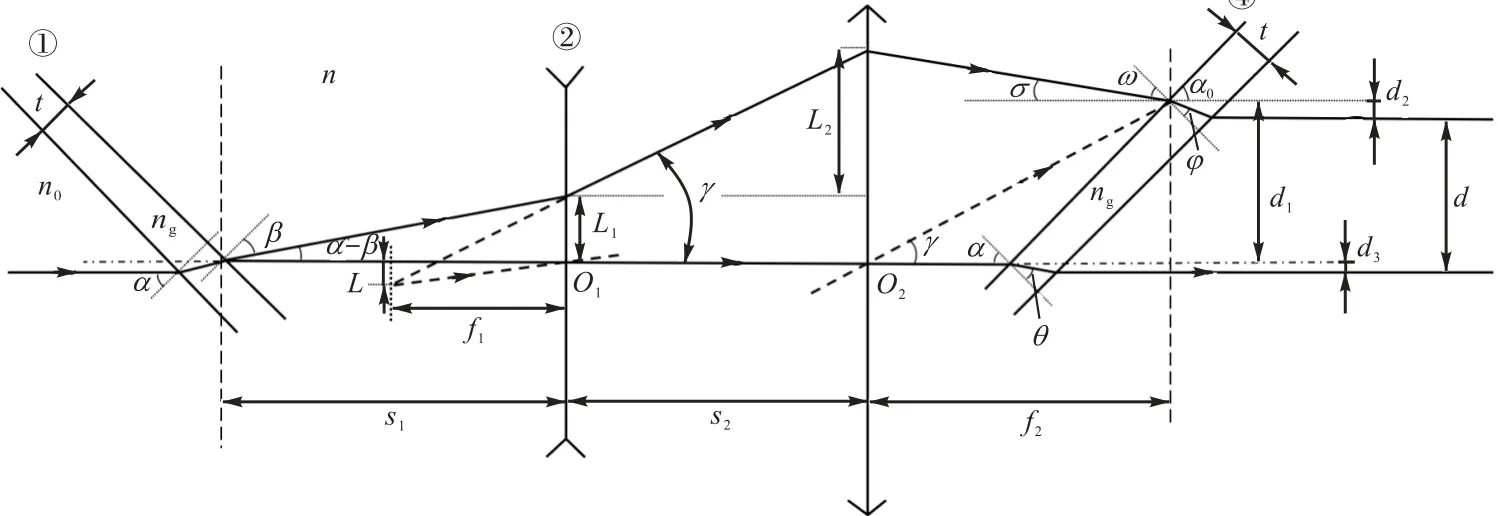
图3 盐度传感探头光路图Fig. 3 Optical path diagram of salinity sensor probe
由式(5)—式(7)整理并化简得

为便于分析待测液体是海水时光线1通过楔形水槽斜玻璃面的偏移量d2,将楔形水槽斜玻璃面上半部分的光路放大,并做辅助线,如图4所示.
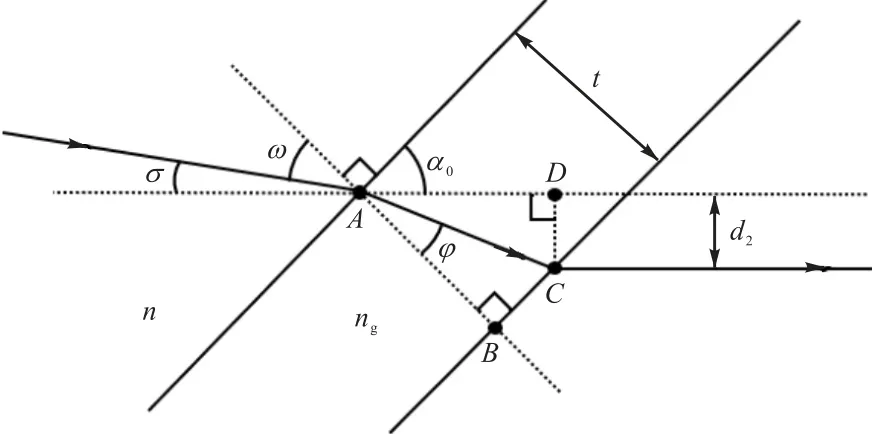
图4 光线1入射至楔形水槽斜玻璃面光路放大图Fig. 4 Enlarged view of the light path of light 1 incident on oblique glass surface of wedge flume
由折射定律可知

令待测液体为海水时光线1通过楔形水槽斜玻璃面的偏移量d2为

图4中,t为楔形水槽斜玻璃面的厚度,令AB =t,运用余弦定理可得

由式(9)—式(11)整理并化简得
为便于分析待测液体是蒸馏水时光线2通过楔形水槽斜玻璃面的偏移量d3,将楔形水槽斜玻璃面下半部分的光路放大,并做辅助线,如图5所示.
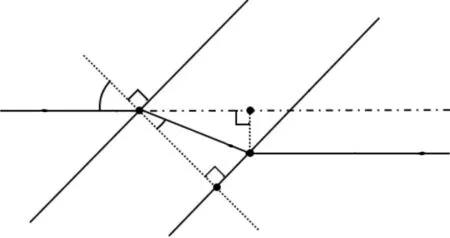
图5 光线2入射至楔形水槽斜玻璃面光路放大图Fig. 5 Enlarged view of the light path of light 2 incident on oblique glass surface of wedge flume
由折射定律可知

令待测液体为蒸馏水时光线2通过楔形水槽斜玻璃面的偏移量d3为

图5中,t为楔形水槽斜玻璃面的厚度,令EF=t,运用余弦定理得

由式(13)—式(15)整理并化简得

综上可得总偏移量d:

计算d过程中涉及的n0、ng、t、α、f1、f2均为系统设计参数.此设计中参数值相应为:蒸馏水参考液的折射率n0=1.333;楔形水槽斜玻璃面的折射率ng=1.5,玻璃厚度t=2mm;激光入射光线在蒸馏水参考液中与楔形斜面法线夹角α=45°.选用焦距f1=2cm的平凹透镜和焦距f2=10cm的平凸透镜.将以上系统设计参数代入式(17)中,通过MATLAB化简计算,在海水折射率n为1.333~1.380范围内得出楔形水槽倾斜玻璃面距平凹透镜的距离s1分别为5、8、10、12cm时光线偏移量d与海水折射率n之间的关系,如图6所示.
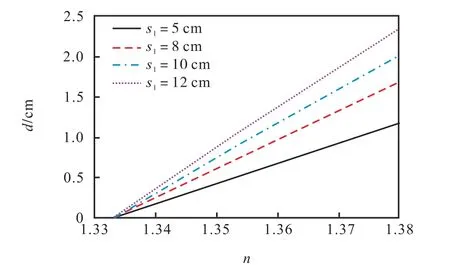
图6 光线偏移量与海水折射率之间的关系Fig. 6 Relation between the light offset and the refractive index of seawater
图6表明:在海水折射率相同时,随着楔形水槽倾斜玻璃面距平凹透镜距离s1的增大,光线偏移量d也增大.当海水折射率为1.333~1.380时,在盐度检测系统能够接收到光信号的前提下,可以通过调节楔形水槽倾斜玻璃面距平凹透镜的距离s1,增大接收端光线的偏移量d,提高系统的分辨率.
当s1=8cm时,光线偏移量d与海水折射率n之间的关系为

由文献[15]可知,在36℃时,盐度30‰~38‰的模拟海水的折射率与盐度的经验公式为

将式(19)代入式(18),通过MATLAB化简计算,在盐度S的取值范围为30‰~38‰时得出光线偏移量d与盐度S的关系,如图7所示.结果表明光线偏移量d与盐度S的相关系数为0.999,所设计的海水盐度检测装置可以通过检测光线在不同盐度海水中的偏移量计算海水盐度.
式(18)和式(19)表明:在经验公式已知的前提下,可推导出盐度S与光线偏移量d两者间的定量关系.但在多数经验公式未知的情况下,测量系统设计参数确定后,待测液体盐度S仅与光线偏移量d成定量关系,其定量关系需要实际测得.盐度测量范围和测量灵敏度取决于传感探头各个部件的选用参数.
在实际测量中,因为不同海区海水盐度与光线偏移量有不同的线性关系,根据文中的实验原理,需要实地采集不同盐度的海水进行盐度标定,获取观测海域海水盐度与光线偏移量的关系,对检测系统相关参数进行修正.结合实地盐度标定曲线和盐度检测系统测得的光线偏移量计算得出待测海水的盐度值.
3 检测系统的盐度标定实验
由于实验条件限制,实验室以氯化钠、无水碳酸钠、无水氯化钙、六水合氯化镁、无水硫酸钠、氯化钾(以上物质均为海水的主要成分)为溶质自制了盐度为14‰~42‰的海水模拟液,将海水模拟液放入待测液体槽内代替海水进行检测系统的盐度标定实验.实验装置如图8所示.
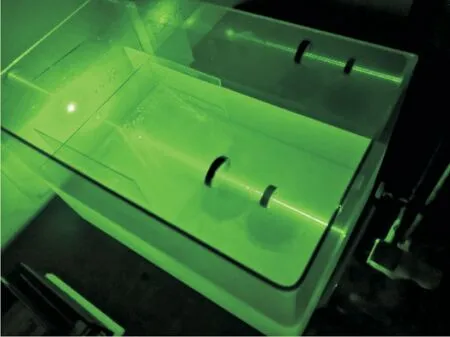
图8 实验装置图Fig. 8 Diagram of experimental apparatus
检测系统中的CCD摄像器件将光信号转换成电脉冲信号,每个脉冲信号反映一个光敏元的受光情况,脉冲幅度的高低反映该光敏元受光的强弱,输出脉冲的顺序可以反映光敏元的位置.
光斑偏移量的测量采用两种方法.第一种方法是利用MATLAB灰度重心法,其步骤为:(1)在暗室中利用光屏承接光斑,光屏后放置像元尺寸为0.8µm的CMOS摄像器件将光斑偏移量图像传输至电脑终端;(2)MATLAB读取图像(m像素×n像素)生成m×n×3的数值矩阵;(3)将RGB图像转化为灰度图像(m像素×n像素);(4)设定灰度阈值为190,其目的是为了降低背景信息对目标的干扰;(5)利用灰度重心法计算光斑中心坐标,如图9所示;(6)根据欧氏距离公式计算两点间距离,即为光斑的偏移量,测量值见表1.第二种方法是采用游标卡尺测量偏移量,其测量值见表1.
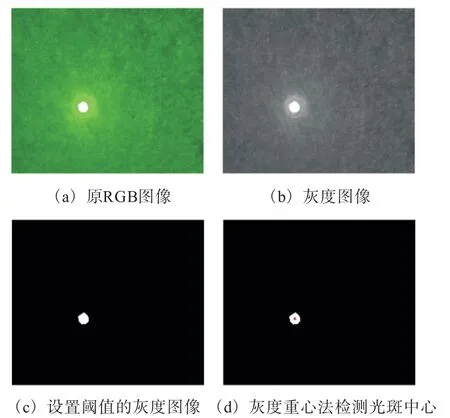
图9 灰度重心法确定光斑中心Fig. 9 Gray center method determining spot center
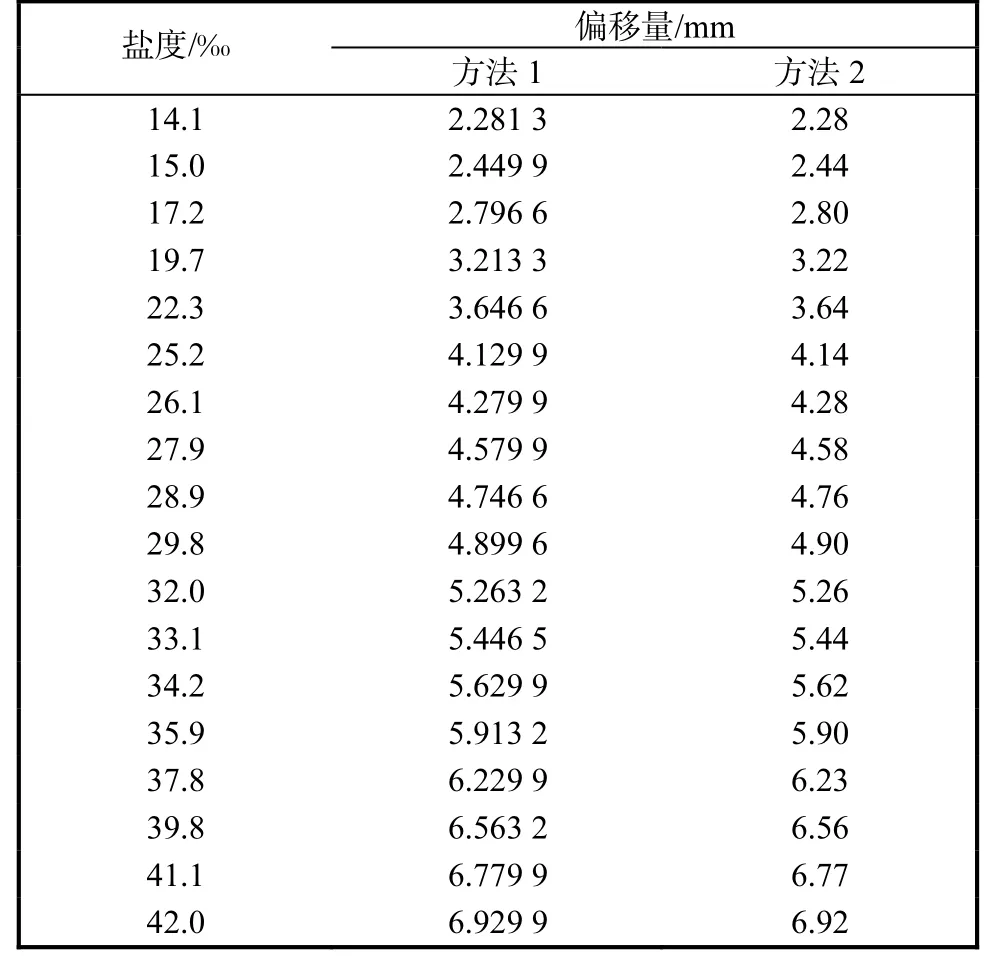
表1 盐度的标定实验结果Tab. 1 Salinity calibration experiment results
在海水模拟液盐度为14‰~42‰的范围内选取18个观测点,采样3次取平均值作为偏移量结果. 由表1数据对比可知,利用MATLAB灰度重心法与游标卡尺所测得光线偏移量的平均差值小于0.01mm,说明实验中可采用游标卡尺测量光线的偏移量的方式,且此方法操作简单.对模拟海水盐度与灰度重心法所测定的光线偏移量进行线性拟合,结果如图10所示.
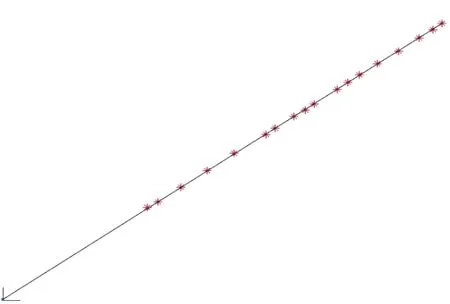
图10 盐度标定曲线Fig. 10 Salinity calibration curve
所得光线偏移量d与其对应盐度S的线性拟合方程为

光线偏移量与盐度的相关系数为0.9998.此结果说明两者有很好的线性关系.依此,检测得到待测液体的光线偏移量后,其盐度可以由式(20)计算得出.
4 结 语
本文基于光电传感技术的优点,设计了一种基于折射率法检测海水盐度的装置.此装置通过结构创新,在盐度传感探头上采用了折射率差动测量和激光扩束单元的设计,可以有效消除温度和深度对盐度检测结果的影响.理论分析和实验结果表明:折射光线偏移量d和海水盐度S之间存在定量关系,通过改变透镜焦距或增大平凹透镜与楔形水槽倾斜玻璃面的间距可提高系统装置的分辨率.检测系统具有体积小、适应性强、成本低的特点,有望在远海及深海定点式盐度检测方面发挥作用.
