多阈值及连通域距离权重的雾判识
2022-03-01李彬卢士庆王飞孙小龙张迎杰
李彬,卢士庆,王飞,孙小龙,张迎杰
(1.内蒙古自治区生态与农业气象中心,呼和浩特 010051;2.高分辨率对地观测系统内蒙古数据与应用中心,呼和浩特 010051;3.中国气象局 云降水物理与人工影响天气重点开放实验室,北京 100081;4.赤峰市气象局,内蒙古 赤峰 024000)
0 引言
大雾的能见度一般小于1 km时,容易引发各类交通事故。在中国东部等经济发达地区,大雾常与一些污染物混合存在,形成雾霾[1]。常规大雾监测方法受到观测站点分布以及观测时间的限制,尤其是在海上,观测站十分缺乏。卫星遥感观测具有覆盖范围广、时效强、成本低、可连续监测等优点,能快速识别大雾分布范围和变化过程,在气象防灾减灾方面发挥十分重要的作用。
国外早在20世纪70年代就开始利用气象卫星开展大雾监测。主要侧重于白天大雾识别,使用阈值法以及目视解译卫星图像中云雾的形状、分布来判断[2]。早期由于卫星红外通道探测水平局限,多以可见光通道进行监测;随着卫星红外技术发展,大雾监测方法也得到了提升。Eyre等[3]利用不透明水云和冰晶在短波红外(3.7 μm)和热红外(11.0 μm)波谱特征差异建立了双通道阈值法监测夜间雾,但在白天适用性较差。刘健等[4]对云顶部粒子尺度特征和雾分布状况进行分析发现NOAA/AVHRR第3通道反射率大值区与雾区有良好对应性。Bendix等[5]基于MODIS的1~7通道,利用辐射传输模式模拟不同厚度雾反射率特征,设定阈值进行判识。刘庆年等[6]基于FY-1D数据提出一种基于支持向量机的大雾识别方法。2008年,周旋等[7]也基于MODIS数据亮温差值法对夜间低云大雾进行监测。王中挺等[8]综合利用环境卫星可见光和红外波段进行大雾监测。周小珂等[9]在现有大雾识别方法基础上,提出了利用夜间微光云图和红外云图识别低云大雾的双通道阈值法,结果表明基于该数据的双通道阈值法进行夜间低云大雾监测的可行性。然而,极轨卫星由于受到时间分辨率的限制,无法对大雾过程进行实时跟踪监测,在气象服务业务中存在局限性。虽然极轨卫星在空间分辨率上一般优于静止卫星,但空间分辨率对大雾监测影响有限,同时,静止卫星空间分辨率也达到较高水平。因此,利用静止气象卫星监测大雾成为业务上的必然趋势。
最早科学家利用美国的GOES系列静止卫星可见光、红外通道数据对大雾进行了遥感监测[10]。1995年日本GMS-5静止气象卫星发射,其星载VISSR(可见光和红外自旋扫描辐射计)新增两个红外探测通道,Ahn等[11]利用GMS-5红外通道提出基于晴空辐射底图的大雾监测算法。我国居为民等[12]、李亚春等[13]、陈伟等[14]也针对GMS-5静止气象卫星进行了大雾监测研究。
2005年,日本MTSAT气象卫星发射成功,其具有1个全色可见光通道和4个红外通道,比GMS-5卫星增加了中红外(3.5~4 μm)通道,有效提升了东亚和西太平洋地区大雾监测能力。刘希等[15]基于MTSAT卫星资料建立了多阈值海雾检测算法。Gao等[16]利用MTSAT红外双通道差值法对黄海夜间海雾进行判识。李军等[17]使用主成分分析法对MTSAT卫星数据开展大雾监测研究。周红妹等[18]基于MTSAT和FY-2C数据,在光谱阈值基础上针对大雾图形特征加入连通域、平滑度等图像处理技术提高判识准确度。何月等[19-20]基于MTSAT数据,采用分级判识太阳高度角阈值和归一化大雾指数,构建了海上大雾监测模型。田永杰等[21]基于动态阈值和指数分离等方法对FY-2E卫星开展大雾监测。王清平等[22]基于FY-4A卫星,使用可见光和红外双通道阈值进行机场大雾监测。
Yuan等[23]利用韩国2010年发射的COMS/GOCI(geostationary ocean color imager),使用多分离指数进行低云海雾判识。王峥等[24]分析GOCI数据光谱特征,采用波段比较法提取黄海海雾;受通道数限制,其对低云的区分效果较差。张培等[25]利用CALIOP数据进行样本点筛选,用于Himawari-8大雾监测的通道和阈值选择,并利用纹理特征熵值进行低云区分,对于云顶较平整的低云或分布不太平整的雾则易造成误判。Yang等[26]使用Himawari-8和FY-4A双星协同进行低云和雾判识,但并未能对二者进行明确区分。
目前,针对静止卫星大雾监测阈值法仍是主流研究方向,目前主要难点为:区分雾与低云,薄雾及云下雾判识;多针对海雾,缺乏海陆通用的算法;新一代静止气象卫星由于时间频次高、数据量大,一些机器学习方法不适用于业务应用。因此,依靠主流的多通道阈值寻找区分度强的分离指数,同时结合实用的图像处理方法是目前满足业务上快速可靠的手段。于是,本文提出基于Himawari-8新的归一化大雾分离指数,可以有效区分水体、陆地、中高云,辅助亮温等参数可以分离低层云,无论在海表还是陆地都可应用;同时,利用反射率差异指数和灰度熵对部分云下雾判识提供了有益的探索。
1 数据介绍
Himawari-8是日本气象厅的第二代静止气象卫星,2014年10月发射成功,定位于东经140.7°,设计寿命15年。具体参数信息可在日本气象厅官网查询(http://www.jma-net.go.jp)。
本文使用了几次典型特征的大雾过程,即2019年3月26日、2019年6月4日、2021年3月5日、2021年3月7日、2021年3月10日和2021年8月2日6 d不同时次卫星数据,结合目视解译与地面观测结果对提出的方法进行分析验证。地面观测数据来自全国综合气象信息共享平台和气象台站观测的天气现象。
2 大雾监测技术方法
图1为大雾判识总流程图,一部分是浓雾和轻雾合并的主雾区判识,另一部分是准云下雾判识。
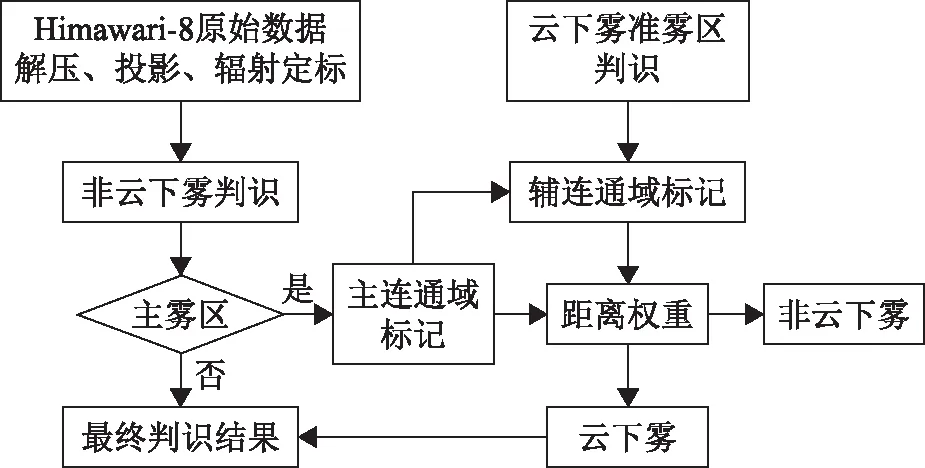
图1 大雾判识流程图
然后基于判识结果分别进行主连通域和辅连通域标记,再依据二者的距离权重指标确定辅连通域是否为云下雾。最后将主雾区与云下雾区判识结果合并为最终判识结果。
2.1 非云下雾的判识
雾本质上属于云,其物理特征和形成过程与云基本相似,只是雾形成在近地面。另外二者粒径大小有所不同,研究表明:雾滴平均半径在几微米,大部分为1~2 μm左右的水滴,且分布较为均匀,而云滴粒径通常在5~6 μm以上。在可见光和近红外波段,卫星接收辐射主要为反射辐射。由于Mie散射作用,雾区可见光波段(0.46 μm)反射率要高于土壤、水体、植被等一般下垫面,低于中、高云;而其后向散射效率在通道1.6 μm要高于低云。
另一方面,中红外波段(中心波长3.7~3.9 μm)信号包括热辐射和部分反射太阳辐射。因水滴和冰晶在此波段有强烈的吸收,当水滴或冰晶较大时,吸收制约了散射,使得目标在该波段的反射辐射较弱。如图2所示,分别选取雾、水体、冰雪及中低云这些由水、冰组成的目标物各100个,统计了各目标物在红外波段3.9 μm和11.2 μm的平均亮温值。由于云、冰雪和水体的粒径尺度较大使反射辐射较低,而雾滴相对有更高的反射贡献,因而雾与水体、冰雪和中低云在11.2 μm波段的亮温值差异不显著,而在3.9 μm处雾对其他目标物的区分性则更加显著。
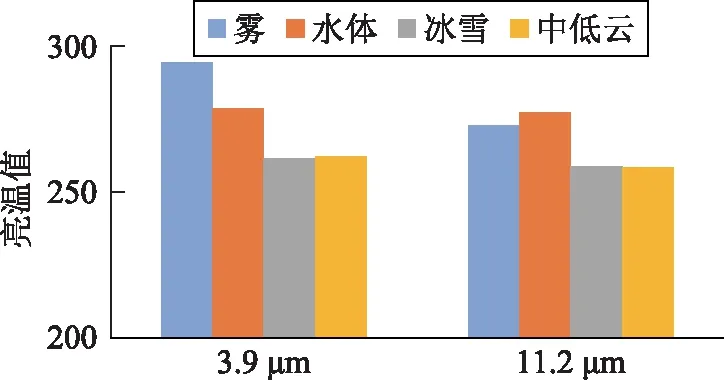
图2 不同目标物3.9 μm和11.2 μm平均亮温值
基于大雾的以上光学特性,并参考前人提出的雾-低云分离指数(fog-stratus distinguish index,FSDI)及归一化雾指数(normalized difference fog index,NDFI)计算方法,本文提出一种新的大雾检测指数(fog detection index,FDI)(式(1)),并结合归一化植被指数(normalized vegetation fog index,NDVI)和反射率等多阈值进行主体雾区的判识。主体雾区是可判识度较高、基本不受云影响、确定性较强的大雾覆盖区域,是进行后续准雾区判识是否为雾的重要依据。
(1)
式中:R1.6和R0.46为1.6 μm和0.46 μm的反射率;BT3.9为3.9 μm亮温。通过对1 000个解译确定的雾像元进行统计得到如图3所示的箱线图,雾的FDI值分布范围大致为-10~30,集中分布于0~20之间。为了对比分析FDI的区分效果,文中分别对高云、中低云、农田、水体、高植被、中植被、积雪、荒漠等进行了统计(图3)。可以看出,高云的FDI值集中分布于120~130之间,算法对此类云的区分作用明显;中低云与雾FDI值集中分布的区域也有明显分界。
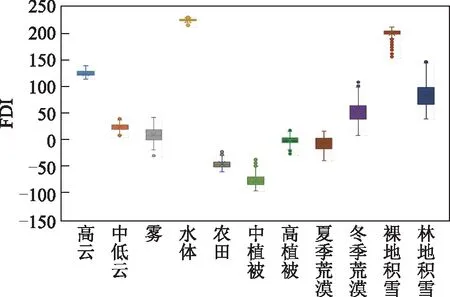
图3 不同目标物的FDI值分布箱线图
此外,指数对低植被覆盖地表、水体、积雪、农田、冬季荒漠等的区分作用明显;在中低云、高植被覆盖地表、夏季荒漠分布仍有重叠。为了尽量减少漏判,本文将FDI值设置为-10~30,并利用NDVI低于0.2来区分高植被地表,利用11 μm亮温来区分夏季荒漠,利用第3波段反射率来区分灰霾,判识流程如图4所示。

图4 浓雾判识流程
云是大雾判识过程中的主要干扰因素,常伴随雾发生,阈值法对低云和薄云区分效果不够理想。经过多阈值识别后的一些中低云虽不能完全被滤除,但表现出细碎和不连续特征,如图5所示。

图5 经过灰度熵过滤前后的结果
本文采用基于灰度熵的团块目标检测。灰度熵反映了窗口内像素灰度的差异程度,越大表明窗口内像素灰度差异越小,当窗口内所有像素灰度值相同时,灰度熵为1;反之,值越小灰度差异越大。首先将经过FDI判识之后的结果转化为二值图像,并设定5×5像元的窗口进行灰度熵检测。这样窗口内的灰度熵值就只有0和1,将值为0的窗口判断为非雾区,反之为雾区[27]。
由于海上轻雾厚度较薄,因此受到海面背景信息干扰大,导致FDI值偏大。为了尽量减少漏判,通过目视解译获得13个典型轻雾区的1 250个像元,参考以往大雾监测中常用的双通道亮温差法,对11 μm、12 μm热红外亮温差(brightness temperature difference,BTD)值统计发现,其值分布范围主要在0.5~1.2之间,集中分布于0.6~0.9之间,如图6所示。
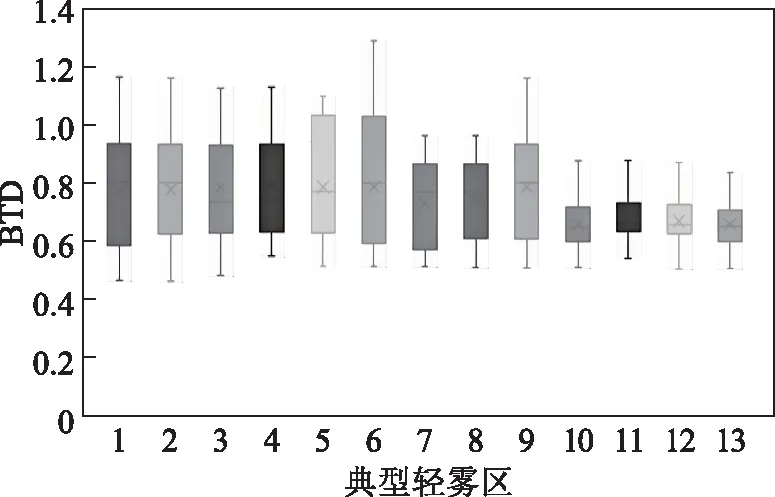
图6 13个典型轻雾区热红外亮温差BTD值分布箱线图
本文将BTD阈值范围设定为0.5~1.2之间,并结合归一化植被指数NDVI、11.2 μm亮温及0.46 μm反射率进一步提升判识精度,如式(2)所示。
BTD=BT11-BT12
(2)
式中:BT11为11 μm的亮温;BT12为12 μm的亮温。
判识流程如图7所示。利用NDVI低于0.12来区分中高植被地表;大于-0.1来区分水体,此阈值是为了一些海上轻雾不被滤除;利用亮温来区分夏季荒漠,利用第1波段反射率来区分灰霾、中高云和低植被地表;利用上述灰度熵方法来滤除低云。

图7 轻雾判识流程
2.2 云下准雾区的判识
有研究分析发现,0.46 μm和0.51 μm的反射率差值指数(reflectivity difference index,RDI)(式(3))可以用于一些薄云下沙尘的特征性识别,因沙尘和大雾均具有一定的高反射特征,对该指数进行分析发现其也可使一些云下雾的连续性特征得以显现。
RDI=|R0.46-R0.51|×1 000
(3)
式中:R0.46和R0.51为0.46 μm和0.51 μm的反射率。计算结果如图8(c)所示,被云系遮盖的雾区有较为完整的显现。图8(a)为三波段(3.9 μm、1.6 μm、0.46 μm)合成的假彩色图,从中可以清晰辨识整个雾区的西北部被呈现蓝色的中低云系所遮盖,在真彩色图像图8(b)中则不是十分容易辨识。
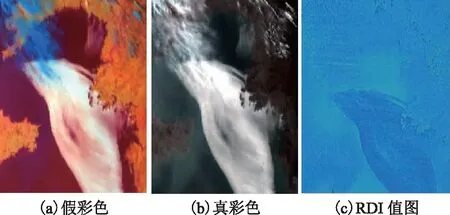
图8 2021年3月7日09时大雾过程
具体判识流程如图9所示。RDI值的范围选择在14和26之间,这一阈值范围可以有效将一些稀疏云系或厚度较薄的云系下雾进行识别。该指数虽然可用于突出云下特征,但也不免会引入误判项,因此算法又补充了其他判据,在保留疑似云下雾的同时尽量减少误判项,为后续连通域方法的运算节约运算量。其中,归一化雪指数(normalized difference snow index,NDSI)是为了减少误判项中的积雪,BT11.2是为了减少误判项中的高云及裸地,NDVI是为了减少误判项中的水体和高植被地表,0.46 μm反射率是为了减少误判项中的灰霾。
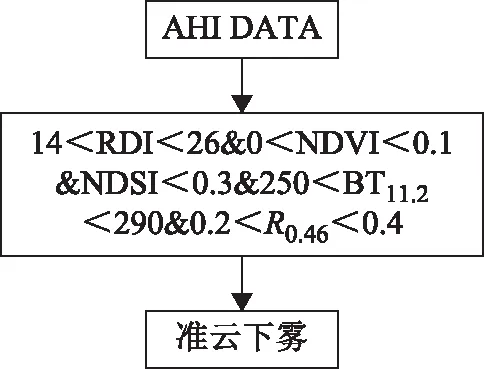
图9 准云下雾判识流程
2.3 基于连通域距离权重判定的雾区判识
在图像中,常见的邻接关系有4邻接与8邻接两种。连通域标记算法有很多种,有的算法可以一次遍历图像完成标记,有的则需要两次或更多次遍历图像,这也就造成了不同的算法时间效率的差别。这里我们使用的是MATLAB中连通区域标记函数bwlabel中使的算法,它一次遍历图像,并记下每一行(或列)中连续的团和标记的等价对,然后通过等价对对原来的图像进行重新标记,这个算法效率较高,其使用默认参数为8连通。在基于2.2节所述云下准雾区判识的基础上,针对其空间分布特征进行筛选。主要思路基于2.1节及2.2节方法判识出的主体雾区为基准,进行主连通域识别标记(图10(a));其次是对基于2.3节判识的准云下雾进行辅连通域识别标记(图10(b));最后是基于连通域距离权重分析的筛选,即计算每个辅连通域与每个主连通域的距离,以连通域的每个边缘像素为计算目标,如果距离小于5的像素数量占此辅连通域总像素数量的比重超过60%,则认为其为云下雾。
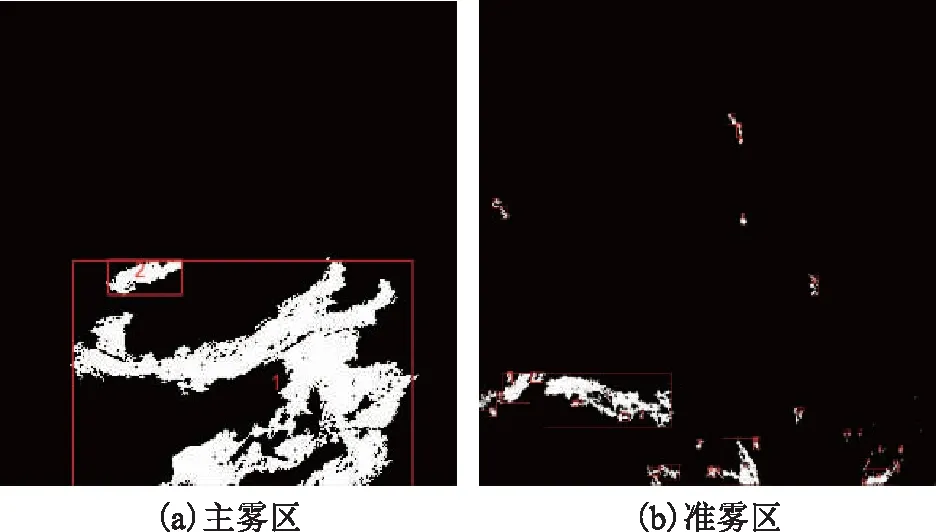
图10 连通域标记识别结果
3 结果与讨论
本节主要对前文所述的实验数据和区域,首先针对无云干扰的主雾区进行识别。如图11所示,图11(a)为2019年3月26日一次渤海海域的大雾天气的卫星假彩色合成图,图11(b)为主雾区的判识结果,图11 (c)为针对准云下雾的判识结果,图11 (d)为通过距离权重判定后最终的大雾判识结果。由判识结果可以发现,在海雾区的中部、东部、东北部的几处轻雾都被有效的判识出来。西北角的云下雾也通过所述方法得到了补充判识。其中,一些很薄轻雾的判识依然有难度;同时,云下雾的判识会导致一定的误判,主要是会将一些云纳入判识结果。
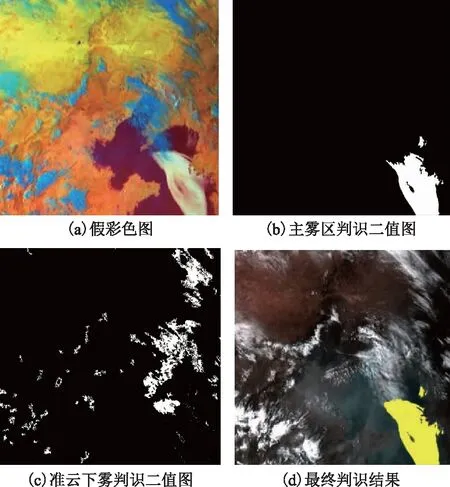
图11 2019年3月26日判识结果
为了进一步论证算法的适用性,选取2021年3月5日、2021年3月10日、2019年6月4日的3幅海雾影像进行判识,综合真彩色和假彩色图像比较验证,如图12所示。
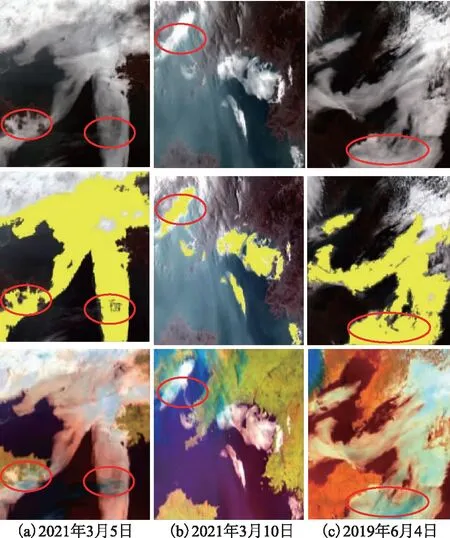
图12 不同个例假彩色、真彩色图像及判识结果
红圈标识的几处云下雾(假彩色图像显示为蓝色)传统阈值法难以识别,而本文所述方法则能较好地识别。但是对于一些边缘处轻雾的识别仍然有漏判,并且当云的厚度较大时,或大部分雾区为云所覆盖时,也较难排除其干扰。
由于海上缺乏气象观测,为了量化方法的分类判识精度,采用Kappa系数进行评价。即以目视解译的结果作为实际样本,以算法判识结果作为预测样本,制作混淆矩阵进行计算。本文以上述实验数据为样本选取了非云下雾、云下雾和云或其他3个类别制作了混淆矩阵,如表1所示。最后经过计算,算法的综合分类Kappa系数为0.92,具有较高的判识精度。
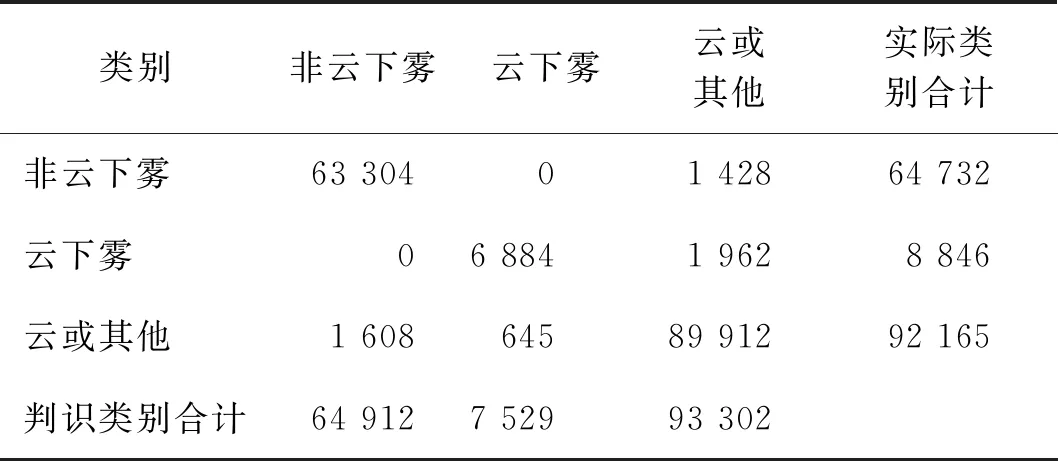
表1 算法分类结果的混淆矩阵
图13为2021年3月7日09时一次陆表大雾的真彩色图像和判识结果。本文选取了区域内33个地面气象站同一时间观测的天气现象与判识结果进行对比,其中27个站观测和判识结果一致(图中绿色点),其中一个站的观测结果为霾,判识结果为非雾;6个站观测结果为雾,判识结果为非雾,主要集中在一些面积较小,分布较散的轻雾区(图中红色点)。
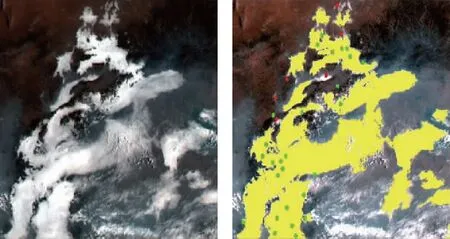
图13 2021年3月7日09时真彩色图像与大雾判识结果
图14为2021年8月2日08时一次林间雾,可以看出主要雾区判识较为理想,但林间雾受地形沟壑和树林遮蔽影响较大,有较多细碎的分散性雾及沟壑雾,该算法由于图像处理过程中的需要,这类型雾的判识精度将会有所损失。
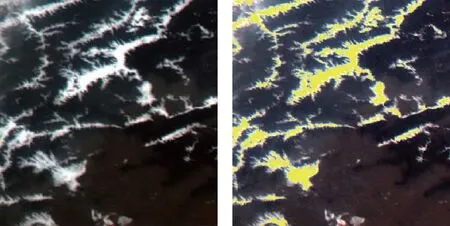
图14 2021年8月2日08时真彩色图像与大雾判识结果
4 结束语
本文基于Himawari-8卫星,提出一种针对性识别方法,引入以多阈值判识为基础的连通域距离权重法来判识云下雾。针对6次大雾过程的判识结果,结合卫星与地面观测数据进行了验证和精度分析,结果表明该方法在有限引入误差的情况下,有效实施了云下雾的判识,具有较高的分类精度,综合Kappa系数0.92,地面验证也取得较高一致性。
对于云下雾的判识会有限引入云的误判,对于一些边缘处轻雾的识别仍有漏判。当云的厚度较大或大部分雾区为云所覆盖时,较难排除其干扰。另外,由于静止卫星的位置固定,随太阳高度角变化,一天中反射率有变化,因此判识过程中应该考虑针对不同时间段的指数变化,阈值设定虽然能够覆盖大部分,但上述因素仍有一定影响。本文方法在判识夜间雾时仍存在局限。
总体而言,本文所述方法在新一代静止气象卫星大雾监测中具有良好效果和潜力价值,为大雾监测提供新的研究思路,为中国新一代静止气象卫星FY-4B的大雾遥感监测提供有益参考。
