考虑路面状态的车辆纵向避障控制策略研究
2022-03-01张晓斐王孝兰郭晨
张晓斐,王孝兰,郭晨
(上海工程技术大学,机械与汽车工程学院,上海 201620)
0 引言
近年来,众多主动安全技术得到各汽车行业和各国学者的广泛关注。特别是汽车AEB(Autonomous Emergency Break自动紧急制动)系统,该系统能在事故发生前降低事故的发生率和事故导致的受伤率。
智能车辆避障系统通过车载传感器如毫米波雷达等,收集环境信息,建立安全距离模型,通过辨识路面状态,搭建整体的避障系统。目前避障控制策略的研究主要基于传统安全距离模型进行参数改进,没有考虑复杂的行驶环境因素,未考虑路面条件的影响,路面附着系数通常被设为常量,算法只能在某种特定路面获得较好的预警效果。
路面附着系数估计算法有两类:Model-based 算法,以固定的数学模型为基础计算附着系数;Experiment-based 算法主要应用车载传感器进行测量,进而完成附着系数计算。
在国内路面状态的研究上,文献[4]针对不同的附着系数道路,采取不同的混合理论估计方法;文献[5]以杜戈夫轮胎模型为基础,利用BP 神经网络对路面状态进行估计,得出了可观的结果;文献[6]分别对不同附着系数的道路建立不同的估计模型,来解决估计过程中出现较大波动的问题;文献[7]利用现有的Burckhardt 轮胎-路面数学模型,实现了路面识别;文献[8]以Pacejka 及LuGre 轮胎模型为基础,采用递归非线性的方法成功区分了不同类型的路面。
本文分析了路面附着系数对纵向避障制动效能的影响,基于滑移率与路面附着系数的关系,采用最小二乘法拟合设计路面附着系数估计算法,以保证对路面附着系数进行精确识别,建立了基于路面附着系数估计的安全距离模型,讨论了安全性要求和舒适性要求对避障控制的影响。在此基础上,建立基于MPC的汽车纵向避障控制策略,并选取典型工况进行Matlab /Simulink-PreScan 联合仿真,验证算法的控制效果。
1 安全距离建模
1.1 制动过程
汽车制动过程中制动减速度的变化曲线如图1所示。

图1 车辆制动过程制动减速度变化图Fig.1 Change of braking deceleration during vehicle braking
为驾驶员的反应时间;为制动间隙时间;为车辆产生制动到达到最大制动力所经过的时间;为持续制动时间,此时减速度达到最大,直到制动结束。
以下公式中,表示车辆初始车速;为最大加速度,该值为μg;表示路面附着系数;表示重力加速度,大小为9.81 m/s。
水平路面车辆制动过程中,考虑路面附着情况不同带来的最大减速度不同。阶段一汽车的行驶距离为式(1):

此过程初速度为的匀速运动。
阶段二行驶的距离为式(2):

此过程也是初速度为的匀速运动。
阶段三时间与速度的关系表示为式(3):

其中,为该阶段初速度, a为时刻的加速度。
速度与距离之间的关系为式(4):

将式(3)和式(4)结合得到式(5):

此过程是加速度增大的减速运动,为减速度的最大值。
阶段四为持续制动阶段,减速度不变,初速度为阶段三的末速度,即式(6):

此过程为加速度不变的持续制动运动,直至车辆静止。结合运动学公式,本阶段的行驶距离为式(7):

式(6)与式(7)结合得到本阶段的行驶距离为式(8):

得到汽车的制动总距离公式(9):

1.2 路面估计
路面与轮胎之间的摩擦力由式(11)计算:

其中,F为切向反力的极限值。
路面附着系数的大小与路面类型有很大的关系,各种路面上的平均附着系数数值见表1。驾驶速度和车轮运动也会影响路面的附着能力,附着系数由路面和轮胎决定,其值显示出高度可变的摩擦性能。滑移率可用式(12)计算:
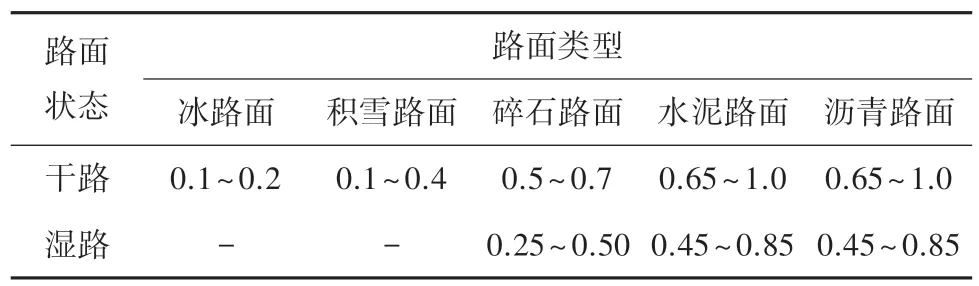
表1 各种路面的平均附着系数Tab.1 Average adhesion coefficient on various roads

其中,ω为车轮转速。
根据上述关系,车辆运行状态可分为:线性区域(该区域的滑移率满足0 ≤005)和饱和区域(该区域的滑移率满足005 ≤03)。车轮正常行驶时轮速约等于车速,滑移率一般小于0.05;当车辆加速或紧急制动时,车辆状态迅速从线性区域过渡到饱和区域,其间存在的过渡区域可以忽略不计。因此,可以在车辆制动前只考虑线性区域的求解问题。
汽车在PreScan模拟环境下计算的滑移率如图2 所示。从图中数值可以看出,滑移率很小,通常小于0.05。
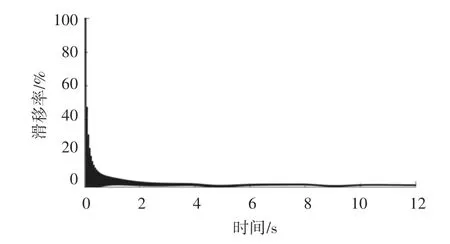
图2 车辆滑移率Fig.2 Vehicle slip rate
结合滚动阻力系数,利用滑移率与附着系数的关系来判断路面的状况。
设左前轮和右前轮的垂直载荷相等,左后轮和右后轮的垂直载荷相等,即式(13)和式(14):

汽车在某些道路上以中低速行驶时,滚动摩擦系数的近似值见表2。
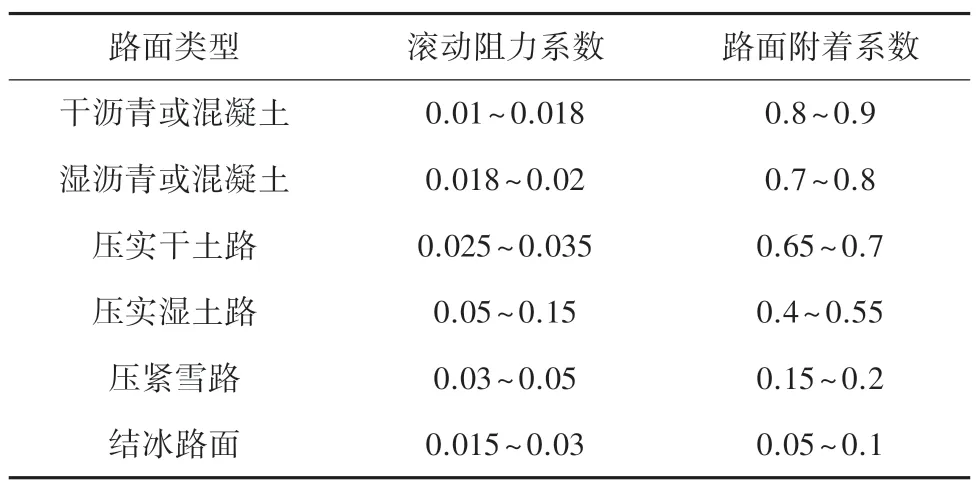
表2 不同路面滚动摩擦系数和附着系数值Tab.2 The rolling friction coefficient and adhesion coefficient of different pavement
滚动阻力系数可由式(15)~式(17)计算:

结合式(12)~式(18)采用最小二乘法进行多元拟合,得到了滚动阻力系数与路面附着系数的关系,式(18):

通过对轮胎的滚动阻力系数估计来对路面状况进行反馈。为证明算法的可靠性和准确度,利用仿真软件将路面的附着系数设为0.5,车辆速度为36 km/h,仿真结果如图3 所示。

图3 传统与改进附着系数估计结果对比Fig.3 The results of traditional and improved attachment coefficient estimation algorithm
由图3 可以看出,相比传统的估计算法,改进后的检测算法较早达到收敛条件,整体波动范围和局部波动范围较小;同时,改进后的平均误差为0.007 31,小于改进前的平均误差0.021 07,准确率为98.63%。
1.3 基于路面状态的安全距离模型
安全距离模型被众多因素所影响,包括自车车速、前车车速、驾驶员反应时间、制动间隙和制动减速度。这些因素对安全距离模型的建立起到了关键性的作用,路面附着状态变化会严重影响到车辆制动时的减速度的大小,进而影响到车辆的制动距离。
整个制动过程自车和前车之间的距离关系如图4 所示,则传统的安全距离可以表述为式(19):

图4 制动过程中距离变化图Fig.4 Distance change diagram during braking process

其中, S为安全距离;为汽车制动过程中行驶的距离;S为前车行驶的距离;为正常驻车时所需要的安全距离。
建立不同工况下的安全距离模型:
(1)前车静止,式(12):

(2)前车匀速,式(21):

(3)前车减速,式(22):
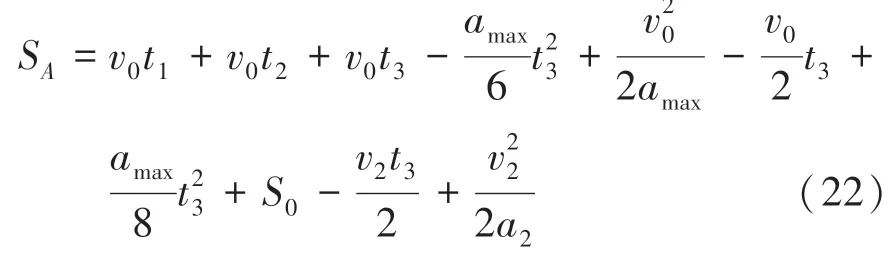
考虑路面附着系数的安全距离三维图如图5 所示,车速80 km/h 时得到的考虑路面附着系数与否的安全距离数值对比结果见表3。容易得出,改进后的安全距离模型随着道路因素的变化而变化,该模型在不同因素下能较好地计算安全距离,具有较好的动态适应性。

图5 不同速度下考虑路面附着系数的安全距离三维图Fig.5 Three-dimensional safety distance diagram considering road adhesion coefficient at different speeds

表3 80 km/h 时有无路面附着系数安全距离数值比较Tab.3 Numerical comparison of safety distance without road adhesion coefficient at 80 km/h
2 纵向避障控制策略的设计
采用分层控制结构,上层控制器获得环境参数和车辆状态参数,输出期望加速度作为下层控制器的输入;下层控制器根据输入确定节气门开度和制动压力,使得实际加速度能够跟踪期望加速度,从而实现分层控制。基于PID 算法设计下层控制策略,并建立逆动力学模型。
上层控制器需要完成针对多目标的约束优化,因此在MPC 理论框架的基础上进行预测、滚动优化和反馈校正。在约束条件的设计中,融入安全性和舒适性因素,从而实现控制要求。
2.1 状态空间方程
将两车间距(),本车车速v(),两车相对速度v(),本车加速度a()统一到汽车纵向运动模型中,建立运动学模型(23)。

()为第时刻的期望加速度;()为系统干扰量;()为目标车辆加速度;为系统的采样时间;为控制时间常数。
为同时满足车辆的避障特性和对驾驶员的保护性能,选取车间距离,本车速度和本车加速度作为优化性能指标,系统的输出方程为式(24):

根据式(23)和式(24)可得到状态空间模型,式(25):

2.2 目标函数及约束条件
评价纵向乘坐舒适性指标主要分析纵向加速度和加速度变化率,在现实生活中还需要考虑乘员舒适性。因此车辆在保证安全的同时,加速度变化量应在尽可能小的范围,保证乘员的舒适度。舒适度可分为4 种情况,具体如下:
(1)正常强度制动(舒适度:一般):制动减速度绝对值小于3 m/s;
(2)小强度制动(舒适度:稍感不适):减速度范围在-6~-3 m/s内,对人员造成了轻微不适感;
(3)中强度制动(舒适度:非常不适):减速度范围在-8~-6 m/s内,车内乘客舒适感极低;
(4)高强度制动(舒适度:极不舒适):加速度已经大于8 m/s,乘员无任何舒适性。
所以,将期望加速度变化量()作为第一控制目标,设计目标函数第一项为式(26):

其中,Γ为权重系数组成的对角矩阵。
将推测量与期望参考量之间的误差值作为第二控制目标,因此目标函数第二项为式(27):

其中,y()为期望参考量。
由式(26)和式(27)得到目标函数,式(28):

通常情况下,需要对车辆进行碰撞安全的计算,以对当前车辆的安全性做出评价。其中,的计算公式(29)为:

其中,为相对距离;v为前车车速;v为后车车速;v-v代表前车与后车的速度差,即Δv=v-v。
纵向避障控制系统要保证的目标是两车的安全距离。为避免碰撞,需要对车距进行限制,式(30):

其中,d为自车与目标车辆的实际车间距,即安全距离。
采用TTC 策略来描述安全临界距离和速度误差之间的关系,约束条件可以表示为式(31):

其中, d为本车与目标车之间的最小安全距离,即安全临界距离。
对v、a、以及期望加速度变化量进行约束限制:
其中, v、v、a、a、、、和分别为v、a、以及的最小值和最大值。
综合以上各式建立如图6 所示的纵向避障控制策略,根据自车周围环境,在纵向方向上做出加速、跟驰或制动的决策。上层MPC 控制模块将决策信息转化为下层逆动力学控制模块可识别的参数,下层控制器再将其转化为制动、加速或跟驰等动作。

图6 纵向避障控制策略结构图Fig.6 Structure of Longitudinal Obstacle Avoidance Control Strategy
上层MPC 控制器的输出即控制量为自车的期望加速度,参考量为期望安全车间距和目标车辆的速度,输入量即预测量为自车速度和加速度、两车相对速度、以及真实的两车距离,干扰量为目标车辆加速度。下层逆动力学控制器的输出为节气门开度和制动踏板压力,输入为期望加速度。
3 联合仿真验证和分析
利用MATLAB/Simulink-PreScan 搭建联合仿真场景。
工况一:本车以60 km/h 做匀速行驶,障碍车静止,车距100 m,结果如图7 所示。
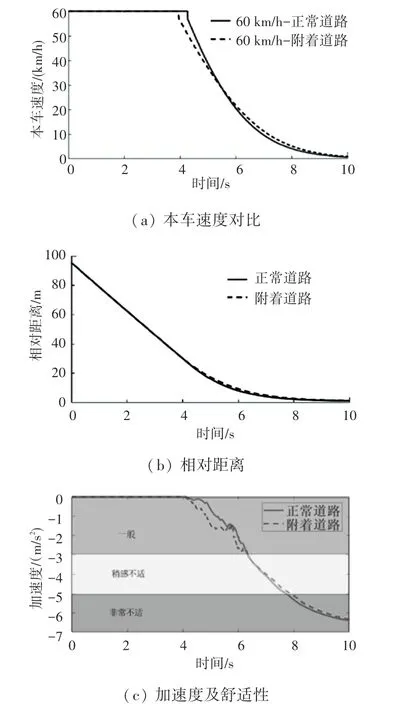
图7 自车速度60 km/h 时前车静止工况仿真结果Fig.7 Simulation results of static condition of the leading vehicle when speed is 60 km/h
初始阶段相对安全,本车保持匀速。随着距离的缩短,碰撞风险逐渐加大,此时开始制动,相对速度和相对距离持续减小,在第10 s 时刻速度为0,与前车的距离也达到最小值2.36 m,成功实现避障。此过程驾驶员的主观感受先后经过了一般、稍感不适到非常不适,在驾驶员能够忍受的舒适性范围内车辆能够成功实现避障,证明了算法的有效性。
工况二:两车相距80 m,前车以20 km/h 速度前行,本车车速60 km/h,结果如图8 所示。
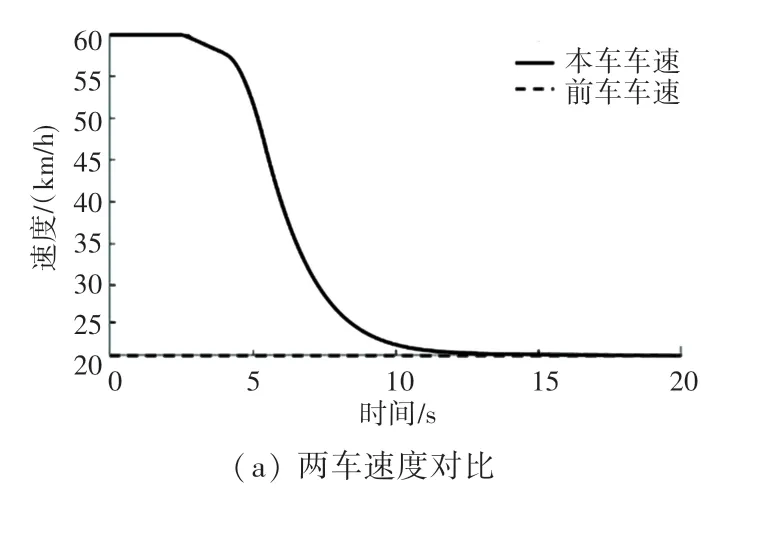

图8 自车速度为60 km/h 时的前车匀速工况仿真结果Fig.8 Simulation results of uniform speed of the leading vehicle when speed is 60 km/h
本车匀速行驶,碰撞风险较小。在5 s 左右车辆所需安全距离大于相对距离,为2.42 s。控制器开始工作,自车迅速减速,并持续了5 s 左右。12 s时刻左右,自车车速已经降至20 km/h,此后稳定跟车行驶,与前车相距7.5 m 左右。此过程驾驶员的主观感受由一般过度到稍感不适,保证了较好的乘员舒适性,车辆成功实现避障,证明了算法的有效性。
工况三:本车车速80 km/h,前车速度60 km/h且车距60 m,前车以3 m/s的减速度制动,结果如图9 所示。
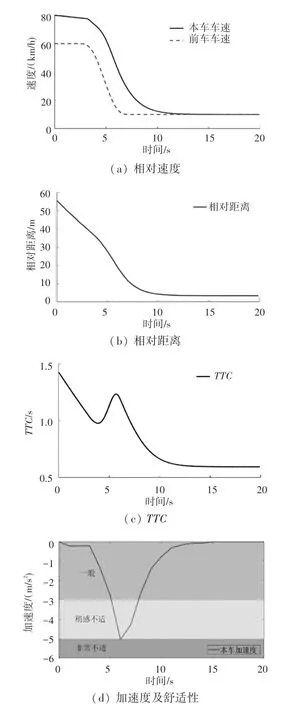
图9 自车速度为80 km/h 时的前车减速工况仿真结果Fig.9 Simulation results of deceleration condition of the leading vehicle when speed is 80 km/h
随着车距缩短,不断减小到1.5 s 左右。前车开始制动后,速度迅速下降,车距进一步缩小,相对速度增加,值迅速下降到0.6 s。随着距离减小,车距达到安全距离,车辆开始制动,同时碰撞风险逐渐增大,最终车辆实现稳定跟车,此时车距5.84 m。在制动过程中,驾驶员的乘坐舒适性由一般到稍感不适,保证了较好的舒适性,且成功实现避障,证明了算法的有效性。
4 结束语
路面附着系数对智能车辆纵向避障控制有重大影响,本文利用最小二乘法提出了一种考虑滚动阻力系数和路面附着系数关系的道路附着系数估计算法,建立的基于路面状态估计的安全距离模型可以自适应确定当前路面安全距离,相比传统模型适应性更强。
结合基于路面状态估计的安全距离模型提出了一种基于MPC 考虑行车安全性和成员舒适性的纵向避障控制策略,利用MATLAB/Simulink-PreScan联合仿真验证了策略的准确性。结果表明,本文提出的策略可以在保证安全性和舒适性的基础上有效提高避障准确率。
