无人机影像融合激光雷达数据在测制大比例尺地形图中的应用
2022-02-26张庆勇
张庆勇,黄 凯
(广西桂禹工程咨询有限公司,南宁 530023)
1 项目概述
1.1 项目介绍
近年来无人机摄影和激光雷达测绘技术迅速发展,无人机具有机动灵活、作业高效迅速、可快速获取三维数据以及飞行安全性高、外业人工作业风险性及成本大幅降低等特点,在小区域大比例尺测图领域具有明显的优势。全自动建模生产的实景三维数据加上高密度的激光点云数据,满足大比例尺测图要求,同时可以真实反映地物的外观、位置、高度等属性,可输出点云数据、TDOM、DLG 等多种成果形式,服务于高层决策和设计。
广西武宣濠江两段河道整治项目长度约23.2 km,要开展河道的基础建设工作,需要对河流进行统一规划。项目测区两岸现状多为灌木、杂草和林地,对采集测量点有一定困难,测区岸线长、工程时间紧迫、天气炎热和雷暴雨天气,均对项目进度造成一定的影响,为了提高测量效率决定采用D2000无人机+D-CAM3000(6100 万像素相机)+D-Li-DAR2000(±5 cm 激光雷达)为主要测量设备,快速获取项目区第一手地理信息资料,为设计部门提供1∶1000地形图和水文断面资料,同时提供二维和三维专题影像数据资料。
1.2 项目内容
布设五等控制网及像控点、制作1∶1000地形图作为设计使用的依据、生产正射影像TDOM 和三维实景模型作为二维和三维专题图制作纸质及汇报的基础资料。
2 技术路线
2.1 无人机飞行平台主要参数
(1)D2000 无人机主要参数。空机重量:2.6 kg;最大载重能力:750 g;悬停精度RTK:水平1 cm+1 ppm 垂直2 cm+1 ppm;差分GPS更新频率:20 Hz。
(2)双频GPS导航模块参数。采样频率:20 Hz;定位精度:5 cm;差分模式:PPK/RTK及其融合作业模式。
(3)D-LiDAR2000 载荷参数。搭载平台:D2000/D20;精度:5 cm@50 m;测距:190 m@10%反射率@100 klx,450 m@80%反射率@0 klx;激光等级:Class 1;测距模式:TOF;波长:905 nm;水平视场角:70.4°;垂直视场角:4.5°/77.2°;发散角:0.03°H×2.8°V;点频:240 kpts/s;回波数:三回波;测距精度:±2 cm;横滚/俯仰精度:0.006°;航向角精度:0.03°;存储容量:32 GB(最大256 GB);重量:680 g。
(4)D-CAM3000 载荷参数。相机型号:SONY a7Rm4;有效像素:6100 万;传感器尺寸:35.7mm×23.8 mm(全画幅);镜头参数:40 mm定焦。
2.2 项目技术路线
技术路线图见图1。
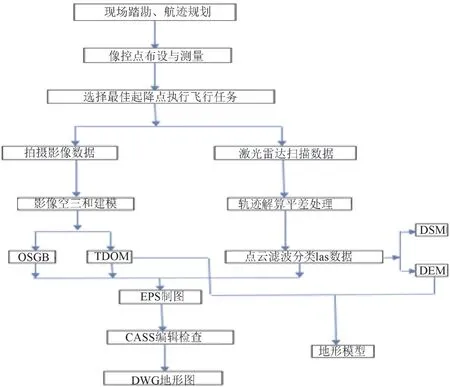
图1 技术路线图
首先,规划航线、布设外业像控点和采集数据,然后执行飞行任务。通过低空飞行获取整个测区的航片和雷达数据。内业利用专业版软件生产正射影像TDOM 和三维实景模型,雷达部份使用专业版软件进行数据解算和二次编辑生产点云数据。以上数据均处理完成后,基于EPS三维测图系统和CASS3D软件系统利用模型和点云数据进行1∶1000地形图要素采集。最后输出成果包括正射影像TDOM、三维模型和点云数据,用于二维专题图和三维专题数据的制作,二维线划图提供给设计部门开展设计工作。
D2000型无人机飞行平台,使用6100万高像素D-CAM3000航测模块及D-LiDAR2000激光雷达模块。D2000 无人机采用四旋翼布局,集成有高精度差分GNSS模块,可以灵活挂载多种任务载荷,有效作业时间长、机动性好、飞行姿态平稳。其配套的飞马无人机管家专业版软件系统可进行航线设计、飞行作业、数据解算等多种功能,可以满足作业全过程的各项需要。
3 实际作业流程
3.1 控制测量
本项目采用千寻CORS 系统进行基站坐标测定,引测国家水准点,采用快速静态测量方式测量像控点的三维坐标(2000国家坐标系统和1985基准高程)。由于地形带状的物殊性,像控点的布设按两岸成对布设,间隔500 m 左右一对,加强TDOM、模型和点云数据的一致性,保证DLG的精度。引测国家高程见图2,像控点测量见图3,控制点样式及造埋见图4,像控点样式见图5,像控点分布示意图见图6,检查点分布示意图见图7,检查点按空地、草地、林地3∶2∶1布设,原则上每公里不少于2个检查点。

图2 引测国家高程图

图3 像控点测量

图4 控制点样式及造埋
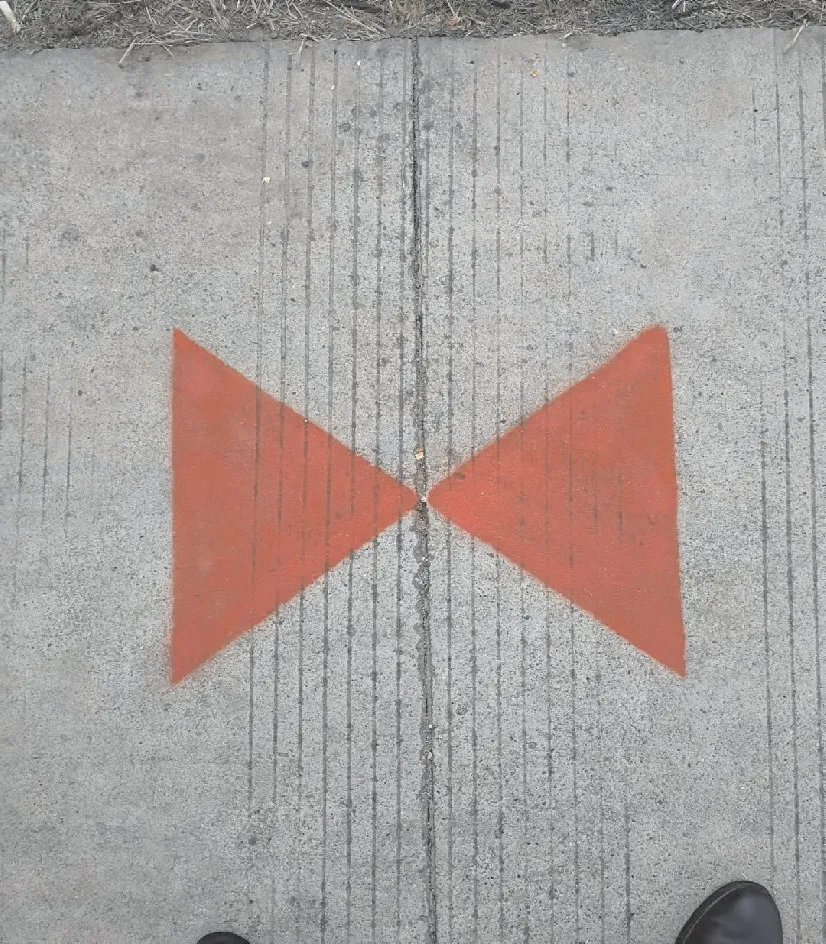
图5 像控点样式

图6 像控点分布示意图

图7 检查点分布示意图
3.2 影像航线与数据
3.2.1 影像航线及参数高架和采集数据飞行
航线设计使用飞马无人机管家专业版优化设计,采用带状航线和多边形航线并用的方式设计,优先采用带状航线。软件集成多模块功能,包括维护、航线设计、智能飞行、数据解算处理等等,操作简便、智能化程度高。
项目航线按1∶500 正射影像航飞,影像分辨率优于5 cm。采用无控模式,相对航高320 m,航向重叠率80%,旁向重叠率60%。带状航线长度设计不大于5 km,带宽设计为300 m,基本满足一架次的影像采集飞行任务。
经过维护菜单确认正常更新后,检查航线规划无误,飞机自检工作完成,即可以执行飞行作业。航线规划和飞行界面分别如图8、图9所示。
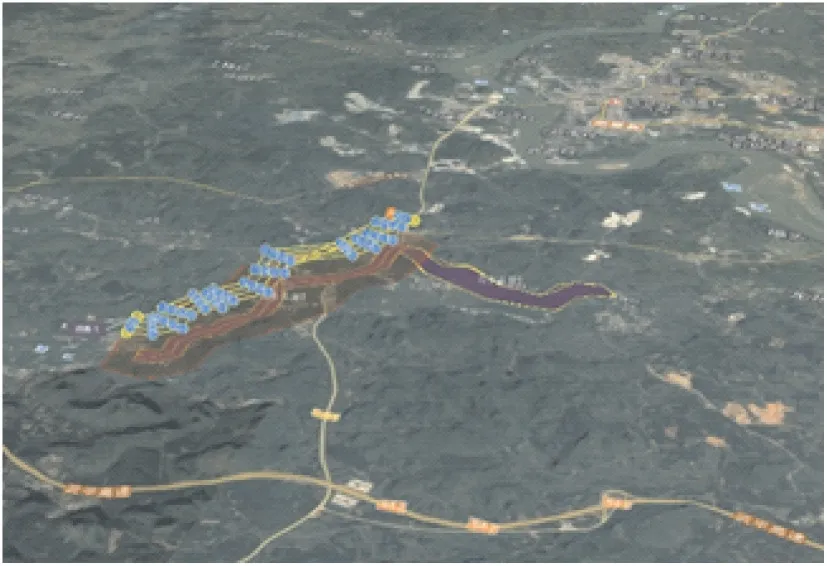
图8 航线规划界面
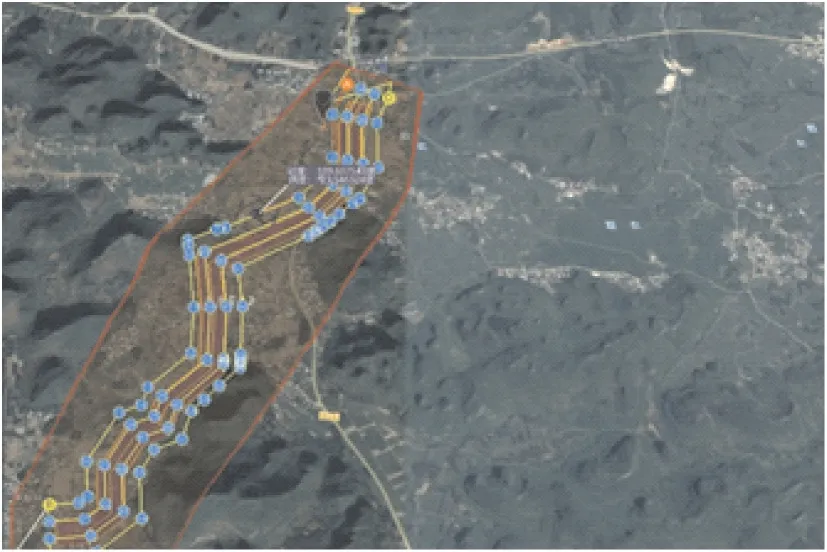
图9 飞机飞行界面
任务结束时,需要清场以确保飞机安全降落,等待提示飞机锁定后,可移动飞机下载数据,包括影像数据、GPS 观测数据、POS 数据等,现场可以用飞马无人机管家专业版对基站和POS 数据进行RTK、PPK融合解算,得出精密POS数据等。
3.2.2 影像数据生产TDOM和三维实景模型
项目利用Context Capture 软件进行空三和模型生产和飞马无人机管家专业版软件进行空三和正射影像生产。
(1)像片数据见图10,POS 数据格式见图11。POS 数据编号必须与相片名称一一对应,否则会出错。
图10 相片数据
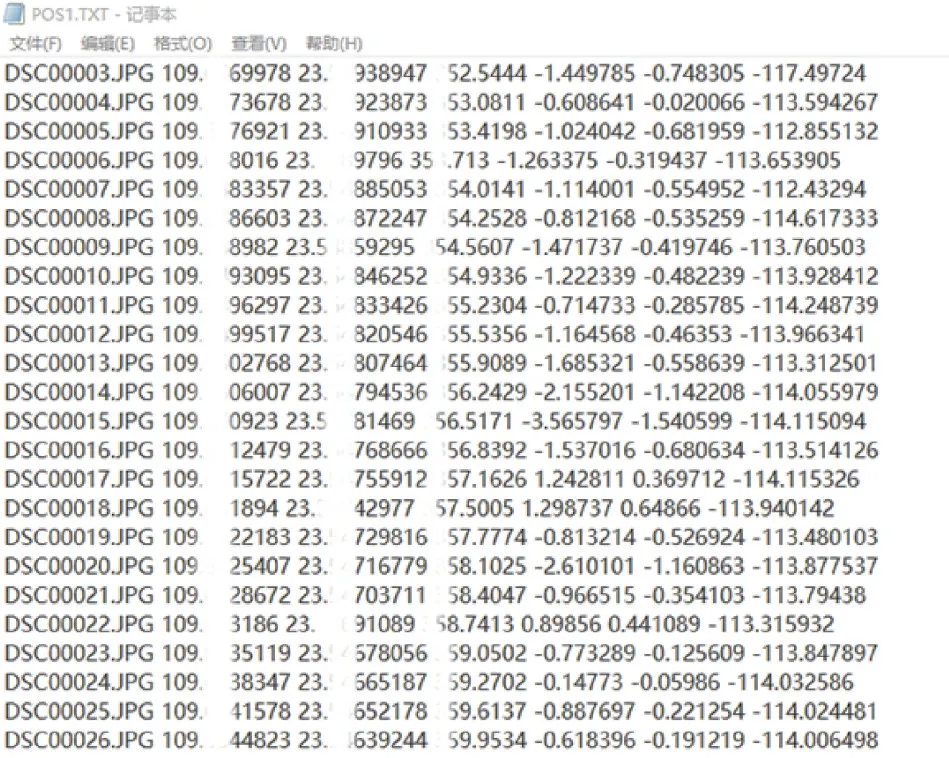
图11 pos数据格式
(2)导入相片和POS 数据,坐标系统选择WGS84,检查无误后开始空三处理。空三通过后导入像控点和检查点重新空三处理,坐标系选择项目所在地平面坐标系。
(3)经检查,空三质量报告全部通过,中误差为1.3 cm,检查点有一个点超限,经查为测量误差造成,放弃该点,其他检查点中误差小于4.3 cm,满足精度要求,可以生产三维模型。
(4)重新空三处理通过后即可以开始正射影像图和三维实景模型的生产,成果见图12和图13。

图12 TDOM成果

图13 OSGB成果
3.3 激光雷达航线与数据
3.3.1 雷达航线及参数设置与雷达数据采集飞行
激光雷达航线设计使用无人机管家专业版优化设计,采用带状航线和多边形航线并用的方式设计,优先采用带状航线。激光雷达数据采集,只要将雷达模块简单更换至飞行器即可。项目通过预扫快速生成DSM,主要确保飞行安全。为了确保激光扫描点的有效数量和质量,设置相对航高100 m的变高飞行,旁向重叠率50%。带状航线长度设计不大于5 km,带宽设计为200 m,基本满足一架次的影像采集飞行任务。激光雷达航线规划和飞行界面如图14所示。

图14 激光雷达航线规划和飞行界面
飞行任务结束时,需要清场以确保飞机安全降落,等待提示飞机锁定后,可移动飞机下载数据包括雷达数据、GPS观测数据、POS数据等。
3.3.2 激光雷达数据处理
(1)轨迹解算。利用无人机管家智理图模块,对GPS 进行格式转换和GPS 解算。利用IE 软件对原始数据进行轨迹解算(见图15),利用无人机管家智激光模块,对数据进行点云解算、航带拼接、质量检查(见图16)、航带平差等操作,然后导出点云数据LAS。
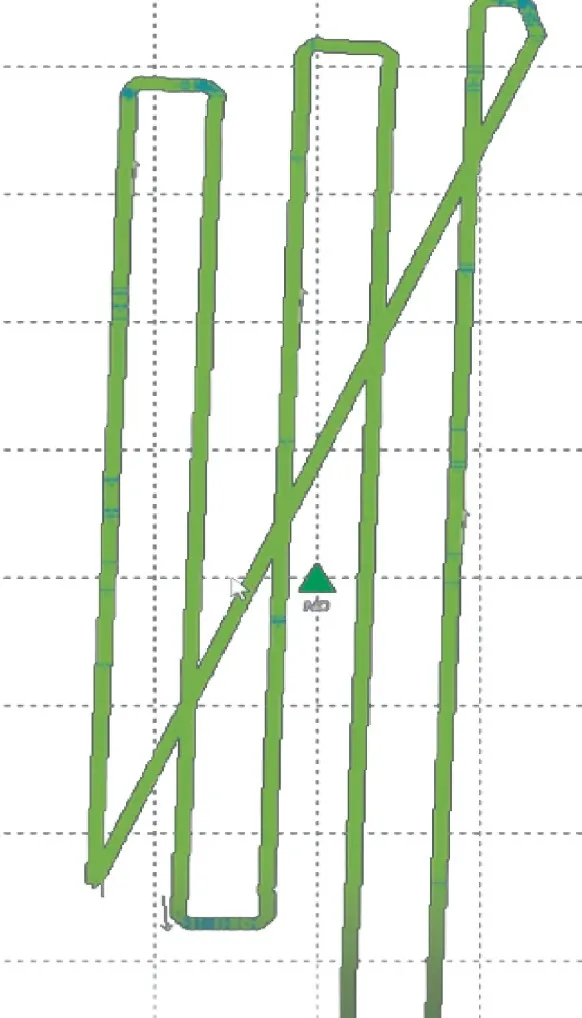
图15 轨迹解算界面
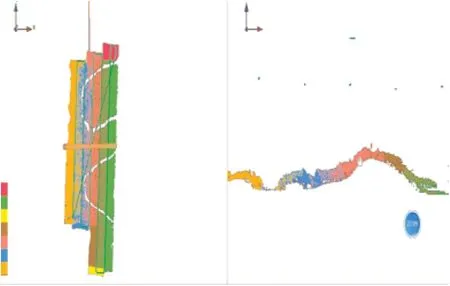
图16 剖面检查界面
(2)点云数据预处理。点云数据预处理是在无人机管家的“智激光”模块中,将轨迹解算后的数据和LIDAR原始数据进行融合,获得标准格式的点云的过程,处理步骤见图17。
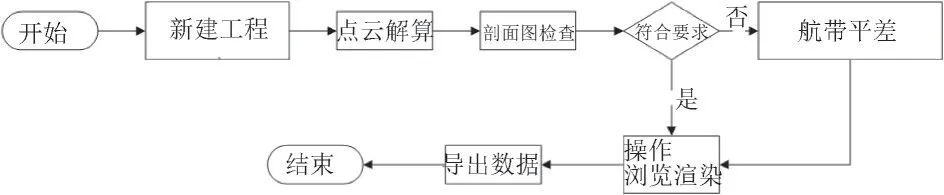
图17 点云数据预处理步骤
3.3.3 点云数据编辑
(1)利用无人机管家智理图点云模块,先利用已有控制点进行参数转换操作,再对原始点云数据进行去噪去冗余操作、点云滤波、精度检核(见图18)等操作。
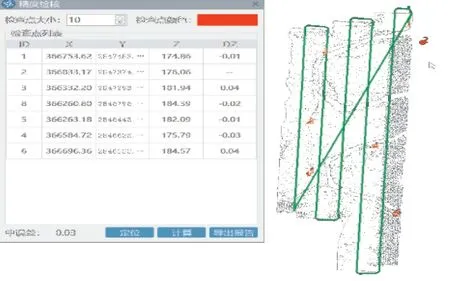
图18 点云精度检核
(2)利用前面生产出来的TDOM对点云进行赋色和地面点分类编辑(见图19),结合自动和手动滤波,保留地面点云数据,去除无用点,生成LAS点云数据,DEM等成果。
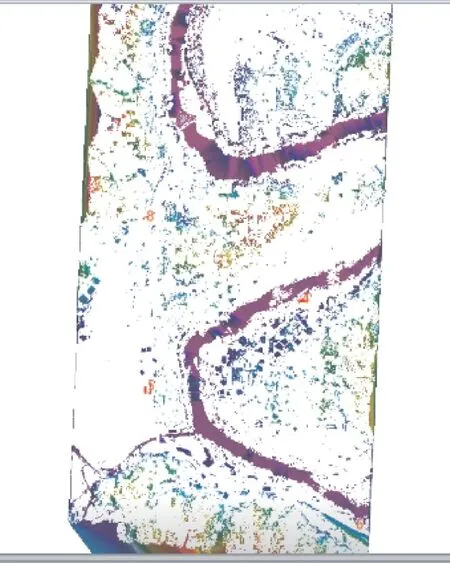
图19 点云赋色和地面点分类编辑
(3)数据精度验证。本项目在目标测区共测得16个检核点,无人机管家软件通过读取检核点平面坐标实现与点云数据的位置匹配,自动寻找到距离检核点最近的点云模型面后进行一键化的高程误差评估计算,结果见图20。从图20可知,高程最大误差-9.1 cm,最小为0.3 cm,中误差为±5.0 cm,成果优于10 cm的精度要求。
3.4 EPS制图
从图20 可以看出,其雷达精度中误差为±5.0 cm,满足1∶1000 的测图要求。打开EPS 软件,加载TDOM 和LAS 点云,即可按测图比例尺绘制DLG 线划图(见图21)。

图20 测区地面点高程精度验证结果表

图21 DLG线划图
4 技术优势
(1)D2000 无人机+D-CAM3000(6100 万像素相机)+D-LiDAR2000(±5 cm激光雷达)可免像控采集雷达数据,而且夜间也可以开展作业,工作效率有着质的提升。由于D-LIDAR2000 具有三次回波功能,测程可达450 m,能够获取灌木、杂草、林木区域地面的高程,大大减少了采用人工在这些区域补测碎部点的耗时和风险。经验证,其测点精度满足地形图精度的要求。自动化、智能化和安全程度非常高,仅需1~2 人就可以完成复杂的工作,提高了外业工作的效率,节约了外业工作成本、降低了劳动强度和风险。
(2)D2000 无人机+D-CAM3000(6100 万像素相机)具备6100万像素,可以在更高的高度飞行,满足不同分辨率产品的要求,只需要少量的像控点就可以满足制图精度要求。同时利用TDOM 和模型作为制图的辅助产品,地形图成果真实反映了实际地形地貌情况,大大地提高了地形图成果的精度。
(3)三维实景模型成果数据量巨大,数据浏览、査询、应用极为方便。经过导入第三方三维实景模型浏览软件平台,解决三维实景模型快速查看以及面积、体积等基础量测功能。
5 结语
飞马D2000 无人机D-LIDAR2000 机载雷达系统具有可靠的安全性能、高效海量高精度的点云数据获取能力,在水利工程测绘应用中效果良好,目前成果已应用到东兰县两座水库和武宣、柳城供水项目等多个项目中,提高了产品质量、生产效率,获得较好的社会效益和经济效益,具有实用性和推广价值。
(责任编辑:刘征湛)