基于MATLAB的高速公路车辆违章占道分析及预警系统
2022-02-24田夫果党红亮庄家丰王韵丰会杰鲍军委
田夫果,党红亮,庄家丰,王韵,丰会杰,鲍军委
(南京航空航天大学理学院,江苏南京,210016)
0 引言
近年来,我国高速公路建设迅速发展,极大地提高了我国陆路交通基础设施水平和道路交通网络的发达程度,使人们出行更加便捷。然而,频发的交通事故成为了人们生命财产安全的一大威胁。所以,针对可能出现的交通问题,设计完备的高速公路预警系统以减少道路交通事故的发生次数、降低道路交通事故死亡率,成为全社会亟待解决的重大课题。
目前,我国所研制的高速公路预警系统种类很多,分别针对车辆行驶的气候状况、车道状况、驾驶者驾驶状态以及违法行驶行为。而对违法行驶行为,大多数的预警系统都偏向于对车辆的超速、逆行、违规停车等行为进行分析和预警,而针对违章占道低速行驶这一隐患极大的行为研究却不多。
在高速公路上,经常有车辆在霸占超车道,并以远低于规定的速度行驶,极大地增加了交通事故发生的几率。早期此类交通事件的检测主要是由交警通过观看视频监控进行人工抓拍,虽然在一定程度上起到了威慑作用,但并不能从根本上解决这个问题,且人工抓拍不仅容易漏检,还会耗费大量物力和人力。基于视频检测的车辆违章占道轨迹识别方法能够为道路交通管理与控制提供全面、实时的交通状态信息,还具备直观性强、可靠性高、实时性好、可检测的范围广等优势,因此受到国内外学者的广泛关注。文献[1]对视频图像预处理的相关算法进行研究,对图像灰度变换、平滑滤波、图像增强以及图像二值化等预处理技术及其相关算法进行比较分析;文献[2]中指出用高斯混合背景模型并结合基于HSV色彩转换的邻域均值快速背景消除法,来提取视频图像前景车辆局部信息,再采用图像纹理特征量对车辆运动信息进行检测。本课题设计了一套新型车道行为分析及预警系统,基于MATLAB程序,采用Hough变换算法、卡尔曼滤波、帧差法等技术实现车道判断、车速测量等功能,通过车道车速匹配来判别违规占道车辆,继而进行记录与预警,以达到减少高速公路交通事故发生率的目的。
1 程序设计总体框架
本系统借助MATLAB工具箱及其图像处理相关功能实现,共分为四个模块:视频采集模块、目标检测模块、违章占道判断模块及预警模块。视频采集模块是用摄像头采集视频并传送到服务器,实现视频图像的采集;目标检测模块用混合高斯模型训练背景图像,循环读取视频的每一帧,并设计算法对视频图像进行处理,得到目标车辆信息,即车辆速度、所处车道,并将信息发送至车速车道匹配模板。违章占道模板是对目标信息进行分析,鉴别车辆车速与所处车道是否符合行车规定,从而判断目标车辆是否违章占道。预警模块是将违章占道的车辆车牌信息发送至预设的LED屏幕中,提醒车主及时变更车道。
2 系统设计与实现
2.1 视频采集
首先判断是否有车辆通过,在有车通过的情况下程序运行开始读取摄像头视频,将读取到的视频信息保存并输入到目标检测模块。
2.2 目标检测
2.2.1 车辆位置提取
首先对视频采集模块得到的视频进行处理。从视频中提取背景帧,根据背景对图像范围进行预处理,把图像中的非道路部分以及道路较远范围的部分屏蔽掉[3]。然后将图像的像素点灰度值设为0,即进行灰度化处理。然后选定图像和背景进行差分运算,差分结束后会有噪音产生,因此必须再对其进行去噪处理。之后将去噪完成的图像进行二值化处理,这一步中需注意到二值化的阈值会影响检测结果,所以需要通过微调参数先找到合适的阈值在进行处理。处理后的图像上就会出现白块,即车辆,而背景则是黑色的,同时还有一些没有去完的噪点。此时,通过计算图像的各个连通域的像素点总数,得到各个连通域的“面积”, 若连通域面积大于某个预设阈值,即可检测出一辆车;反之,该连通域可能是噪音或者背景的微量变化。
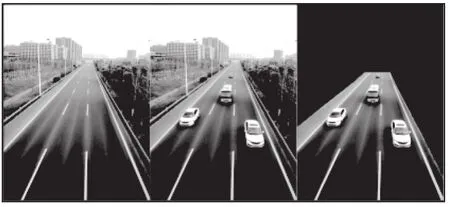
图1 处理过程1(背景、原图、预处理)
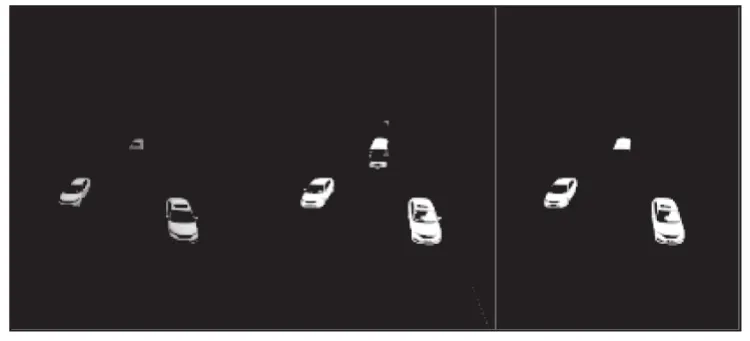
图2 处理过程2(差分结果、二值化、阈值检测)
2.2.2 车道判断
对于车辆所处车道的判断,可以由车辆位置与车道线进行比较得到。根据车道线的直线特征,使用霍夫变化对图片进行特征提取,并进行卡尔曼滤波处理,得到清晰的车道线[4]。随后将目标提取中得到的车辆位置与车道线在参数坐标中进行比较,判断出车辆所处车道。
2.2.3 车速测量
能否快速、准确地从背景图像中分割出运动车辆,能否对天气变化、光照、背景扰动等具有较强的鲁棒性等等都是判定检测方法优劣的重要指标。本文进行的是高速公路上的车速测量,故采用帧间差分法,借助 MATLAB图像处理工具箱及其图像处理相关功能,对摄像头的视频数据进行处理,进而测量车辆车速。
对于视频序列图像信号,两个相邻的图像信号的信息对于图像来说是最有效的信息。帧间差分法[5]对视频图像中运动目标的提取是以经过阈值化的相邻帧间像素差来实现。视频图像中相邻图像帧的时间间隔很短,因此帧与帧之间的差别主要体现在变化的运动目标。灰度图像中没有发生变化的部分在对连续的两帧图像进行差分,阈值化处理之后被减掉,灰度发生变化的部分会被保留。算法流程如图3。

图3 帧间差分法流程
综合来看,帧间差分法的算法比较简单,对环境的适应性较强,不易受到光线和目标阴影的影响。当目标运动较快时,能够很好的检测到运动目标。
2.3 违章占道判断
《道路交通安全法》实施条例第七十八条第三款规定,对各车道的车速有具体的要求,但不同地区不同路段也会有相应的速度要求。在进行分析预警时应考虑实际情况,选取合适的速度限制范围作为预设值,根据车辆所处车道,将车辆的速度与对应预设值进行比较,即可得出车辆是否有占道低速行驶行为。
考虑到现实情况,当连续多个车辆出现车速不符合车道要求的情况时,后续车辆有可能是受到最前方车辆违规行驶的影响,即被动低速行驶。所以,程序会优先记录最前方车辆的车辆信息进行预警,随后根据车距判断后续车辆低速行驶是否为被动情况。高速公路对行车间距有相应规定,当超车道出现连续违章低速行驶车辆时,若车辆间距小于规定数值,可认为后面的车辆是被动低速,即不属于违章占道,否则视为违章占道行为。
2.4 预警
在判断出某一车辆存在违章占道行为后,则通过车牌识别程序得到该车辆的车牌号码。首先将收集的字符模板导入库中,以方便车牌号的识别与提取。对于视频得到的图像进行区域切割,得到行方向合理区域,其次得到定位剪切后的彩色车牌图像。将彩色车牌图像进行灰度处理,选取合适阀值对区域进行二值化处理,得到黑色的车牌背景与和白色的字符。进一步进行滤波处理将图像去噪,最后对去噪后的图片做先膨胀后腐蚀处理,便可得到目标的车牌号码。
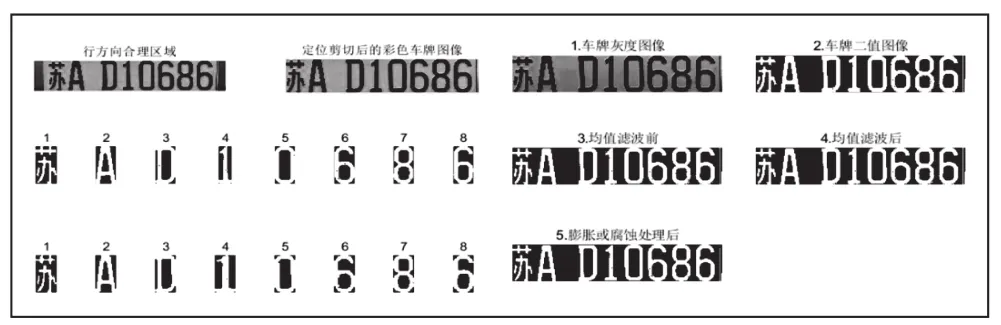
图4 处理过程及结果
得到目标的车牌号码并存储后,将此数据传输至公路上的LED屏幕进行显示,以提示驾驶员采取相应措施,达到预警效果。
3 总结与展望
针对高速公路违章占道这一典型行驶行为,本课题提出一种新型高速公路预警方式:基于MATLAB图像处理功能对目标进行检测、测速,并结合行车规范分情况甄别违章车辆。确定车辆违章后自动识别目标车牌,送至预警系统以达到警示之效。因此本课题进一步拓展了高速公路预警系统的功能范围,对当前发生的违规行驶行为进行分析和研究,进一步规范高速公路的行车行为,从而减少交通事故的发生。
在此基础上,可将对速度的检测与变道轨迹检测结合,形成一个针对违章占道行为的全方面检测,则会使功能更加完善,进而提高预警系统的工作效率。
