多旋翼无人机无线充电技术研究进展与发展趋势
2022-02-21蔡春伟柴文萍杨世彦
武 帅 蔡春伟 陈 轶 柴文萍 杨世彦
多旋翼无人机无线充电技术研究进展与发展趋势
武 帅1,2蔡春伟1陈 轶3柴文萍1杨世彦2
(1. 哈尔滨工业大学(威海)新能源学院 威海 264209 2. 哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001 3. 中国人民解放军92578部队 北京 100161)
多旋翼无人机在多领域的应用,使得无人机无线充电技术备受关注。该文对多旋翼无人机无线充电技术进行了综述。首先,总结了无人机无线充电技术的三种不同结构和原理;然后,重点对磁场耦合式和电场耦合式无人机无线充电技术近期研究成果和相关的热点问题进行了阐述,主要分为耦合机构和错位应对方案研究;最后,对多旋翼无人机无线充电技术的发展趋势进行了展望,论述了亟待解决的关键技术。
多旋翼无人机 无线充电 耦合机构 错位
0 引言
近年来,无人机(Unmanned Aerial Vehicles, UAV)在民用和军事领域都扮演了重要角色。根据机体结构,无人机可以分为固定翼无人机、无人直升机和多旋翼无人机三种,如图1所示[1]。其中,多旋翼无人机具有速度可控、垂直起降、精准悬停等优势,已在农林植保、运输配送、侦查监视等领域发挥了重要作用。尽管随着多旋翼无人机性能的不断提升,在多领域都展现出广阔的应用前景,但其续航及电能补给问题一直未得到有效改善。在动力电池能量密度无法取得突破性研究进展的前提下,多旋翼无人机系统通常只能续航20~40min。有限的续航时间造成多旋翼无人机仅能执行短距离和小范围作业任务,严重限制了多旋翼无人机的应用。此外,伴随着无人机巡检和作业向着无人值守化方向发展,这对无人机自主电能补给技术提出了新的要求。

图1 无人机结构分类
目前,解决无人机续航问题的传统方案主要有以下三种:第一种是在无人机上搭载太阳电池实现能量自持,如国内的“彩虹”太阳能无人机[2],如图2a所示,机翼上的太阳电池在巡航时收集并储存电能,但该方案仅适用于具有超大机翼的固定翼无人机。第二种方案是利用基站的机械手为无人机更换满电电池[3],具有操作效率高的优势,但需要改造无人机,还需要精密的机械与控制装置。第三种方案是采用接触式自主充电平台,如图2b所示[4]。无人机上布置了裸露的金属电极,同时充电平台也由裸露的金属电极组成。无人机降落至充电平台时,发射端和接收端的裸露电极直接接触,组成导电回路。该方案具有效率高、成本低的优势,然而裸露电极存在磨损老化、野外环境应用时易短路和断路的问题。因此,还亟须一种安全、可靠、自动化程度高的新型无人机电能自主补给方案。
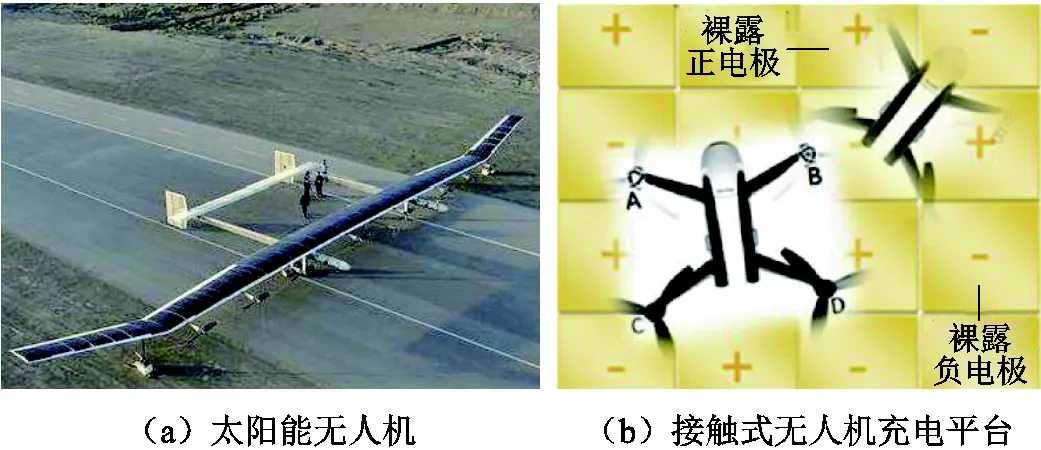
图2 太阳能无人机和接触式无人机充电平台
无线充电技术具有安全、灵活等优势,在粉尘、水下等恶劣工况以及无人值守的场合具有独特的优势[5-7]。无线充电技术应用在无人机领域(后文中所涉及无人机均特指多旋翼无人机),能够有效提升无人机作业范围,并且满足无人机无人值守化的任务需求,因此无人机无线充电技术具有广阔的应用前景。然而,无人机的特殊结构,使得耦合器设计更加困难;无人机搭载能力极为受限;无人机抗电磁干扰能力弱,而且无人机无线充电系统的机载侧有尽可能不使用铁氧体、铝板材料的要求,需要无线充电系统具有好的漏磁自约束能力,这些需求极大地增加了无人机无线充电技术的实现难度。
无人机无线充电技术作为实现智能无人化系统最后一步的关键助力,获得了国内外团队的深入研究,已取得一系列成果。本文对当前无人机无线充电技术方面所取得的主要研究成果进行了综述,归纳和总结了当前各种技术方案的优缺点和适用范围,讨论了有待深入解决的问题以及应用发展趋势。
1 无人机无线充电技术及原理
根据所采用物理原理的不同,无人机无线充电系统主要分为磁场耦合式、电场耦合式和电磁辐射式。本部分将围绕这三种无线充电的技术及原理、系统构成进行阐述,并分析其优缺点。
1.1 磁场耦合式无人机无线充电技术
磁场耦合无线充电系统基于近场的磁场耦合原理,典型系统构成如图3所示,主要包含高频逆变、补偿、耦合机构、整流及功率调节等部分[8]。由于近场耦合的传输距离较近(cm级),该技术方案适用于无人机定点降落后的充电;而小的磁场作用范围也确保了耦合线圈之间更容易建立强耦合关系,易于实现高功率密度设计。
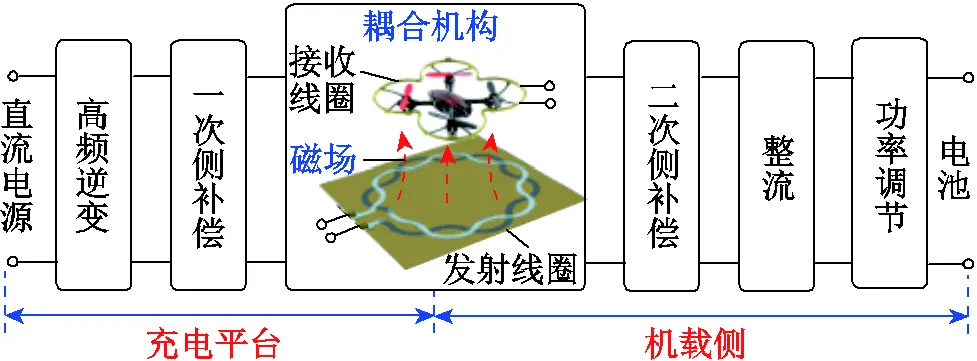
图3 磁场耦合式无人机无线充电系统原理图
1.2 电场耦合式无人机无线充电技术
电场耦合式无人机无线充电技术基于近场电场耦合,其原理图如图4所示[9]。耦合机构由四块薄金属板/箔构成,具有成本低、质量轻等优势。由于电场耦合式无人机无线充电系统同样基于近场耦合原理,因此也更适用于无人机定点降落后短距离充电的场合。
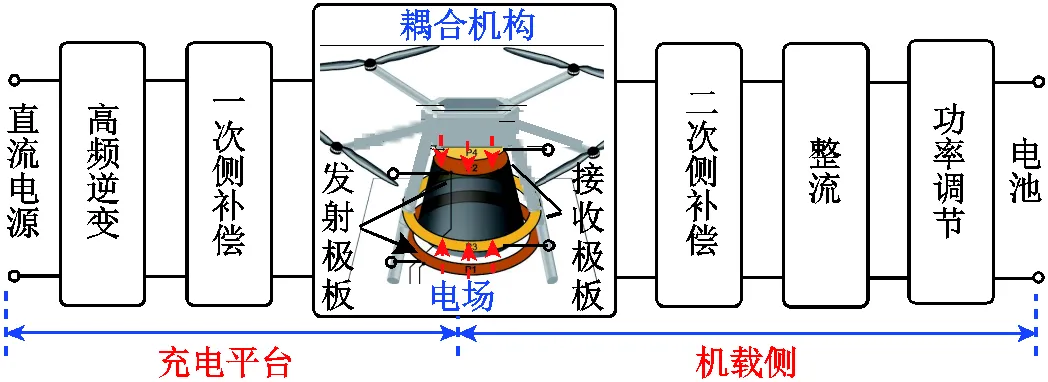
图4 电场耦合式无人机无线充电系统原理图
1.3 电磁辐射式无人机无线充电技术
电磁辐射无线充电技术是一种远场辐射电磁波的电能传输方式,主要包含激光式和微波式。激光无线充电系统如图5a所示[10-11],发射器向外发出激光束,在瞄准控制器的控制下激光束跟随无人机;搭载激光接收系统的无人机实现对远距离传输的激光束能量接收。尽管该方案无需无人机起降操作也可满足大功率充电需求,但是高成本和高危险性令其无法在城市环境中使用。
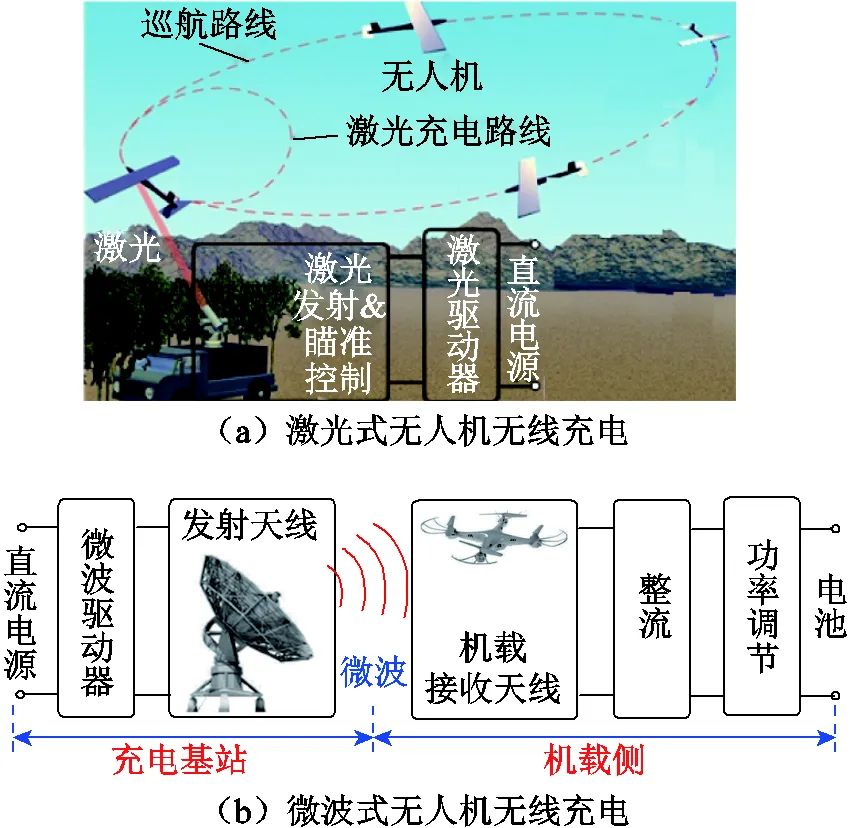
图5 激光与微波式无人机无线充电原理图
微波式无人机无线充电如图5b所示。微波无线充电同样是实现远距离供电的重要手段[12]。早在1969年美国雷神公司就开发出供无人机使用的微波式无线电能传输系统[13],基站利用聚焦天线向特定空域发射微波束,无人机在距离基站15 m处利用阵列接收天线拾取270 W电能,效率约5.4%。然而,微波式无线充电是一种辐射传能方案,传输效率低,目前还无法依靠该技术作为无人机电能补给的常用手段。
图6总结了无人机无线充电技术方案:电磁辐射式无线充电技术可实现对飞行中的无人机动态充电,但功率等级、效率、安全性、成本等问题目前无法妥善兼顾;磁场耦合式和电场耦合式无线充电技术具有传输功率大、传输效率高、安全性好等明显优势,是当前无人机无线充电技术研究的热点。下文将围绕磁场耦合式和电场耦合式无人机无线充电技术,对相关的研究成果和热点问题详细论述。
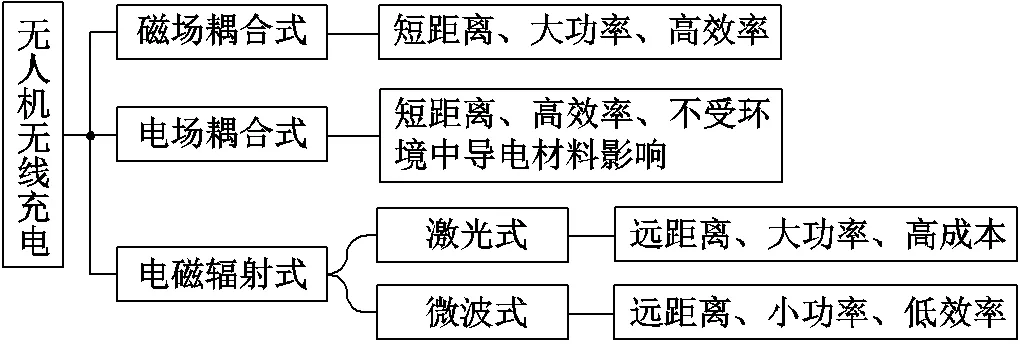
图6 无人机无线充电技术分类与特点
2 磁场耦合和电场耦合无人机无线充电研究成果与热点问题
2.1 国内外近期研究成果
国外开展磁场耦合和电场耦合无人机无线充电技术研究的科研机构主要有英国帝国理工学院、意大利拉奎拉大学、韩国KAIST、美国WiBotic公司和日本九州大学等。国内进行无人机无线充电技术研究的机构主要有华南理工大学、武汉大学、哈尔滨工业大学等。相关研究主要集中在耦合机构、电磁泄漏与屏蔽和抗偏移等方面。
英国帝国理工学院[8,14]和意大利拉奎拉大学[15]研究团队在磁场耦合机构和抗偏移方面开展了大量研究工作,基于大对小线圈结构有效提升了抗偏移性能;韩国KAIST团队[9,16]针对磁场耦合机构、电场耦合机构及电磁泄露方面开展了深入研究,提出系列新颖的线圈和极板结构;美国WiBotic公司[17]在轻量化的磁耦合机构方面开展了研究工作,提出一种轻量化线圈结构;日本九州大学研究团队[18]在电场耦合机构方面开展了深入研究。
华南理工大学张波教授团队[19]在磁耦合机构设计、系统建模与控制方面开展了系统的研究,实现耦合系数动态变化下的稳定功率传输;武汉大学的王军华教授团队[20-21]在磁耦合机构和抗偏移方面开展了深入研究,提出一种多线圈发射平台;哈尔滨工业大学朱春波教授团队[22-23]基于圆盘对圆盘的磁耦合机构设计了500 W无人机无线充电系统,并深入研究了耦合机构的磁场分布及碳纤维机身对充电系统的影响;哈尔滨工业大学蔡春伟教授团队[24-27]提出应用于无人机的交叉型磁耦合机构,基于发射侧功率控制和位置辅助矫正装置设计了100~600W多功率等级的无人机无线充电系统。
表1从传输功率、效率、耦合器结构、偏移容忍度等方面总结了近年来国内外关于磁场耦合式和电场耦合式无人机无线充电技术研究成果。从表1可知,国内外关于无人机无线充电已取得较大进展,传输功率在8~600 W之间,基本能实现大于90%的传输效率。此外,国内和国外对于磁场耦合式无人机无线充电技术方面差距较小,但国内在电场耦合式无人机无线充电技术方面尚无标志性研究成果。
表1 国内外主要科研机构关于磁场耦合式和电场耦合式无人机无线充电研究成果
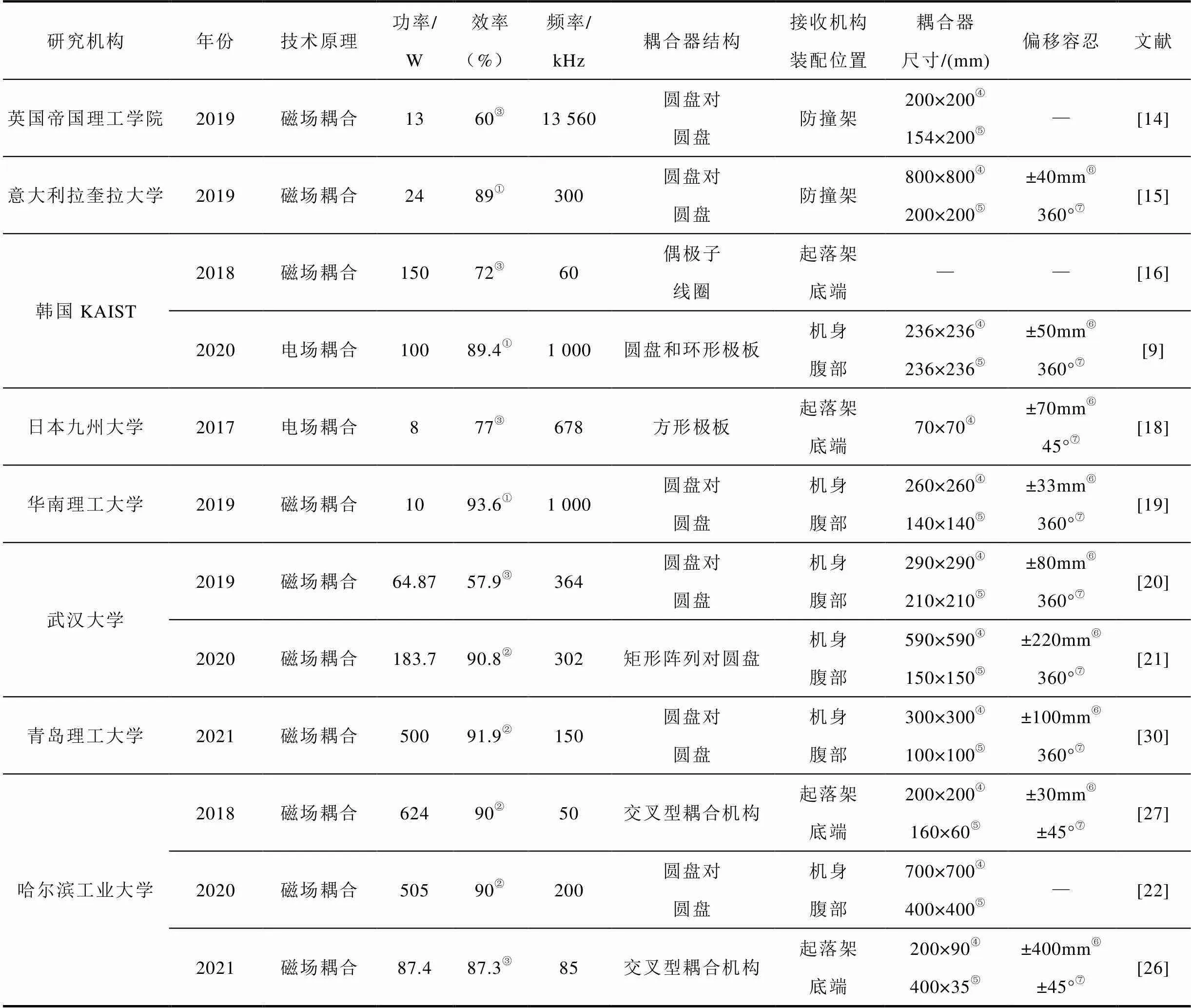
Tab.1 The research progress of magnetic field coupling and electric field coupling wireless charging for unmanned aerial vehicle of the major research institutions and enterprises
注:上标“①”表示耦合器效率;上标“②”表示DC-DC效率;上标“③”表示DC-电池效率;上标“④”表示发射线圈尺寸;上标“⑤”表示接收线圈尺寸;上标“⑥”表示允许无人机落点偏移充电平台中心的距离;上标“⑦”表示允许的无人机降落方向偏差。
2.2 研究热点问题
无人机结构异型、搭载能力受限,设计对无人机结构适应性强、体积小、质量轻、耦合能力强的高性能耦合机构,成为无人机无线充电面临的一个关键问题;无人机降落后可能出现的偏移距离远大于机身尺寸,大范围错位下的可靠充电成为无人机无线充电亟待解决的另一个关键问题。针对以上两个问题,国内外学者开展了大量针对性研究,但尚未有对这两方面研究成果的系统性总结。为此,本文将对无人机无线充电磁耦合机构和错位应对方案成果进行系统的分析与综述,以期为无人机无线充电技术的研究和应用提供参考。
2.2.1 无人机无线充电的耦合机构研究
耦合机构是无线充电系统中能量耦合的核心部件,决定了系统的磁/电场分布、耦合效果及传输性能,其设计严格受限于应用对象和应用环境。其中,磁场耦合机构由线圈、磁性材料和屏蔽材料构成,而电场耦合机构由金属极板和外部绝缘材料构成。由于无人机的结构特殊,而且对接收装置的体积、质量和安装位置有严格的限制,这使得耦合机构设计成为无人机无线充电技术研究的难点。
1)磁场耦合机构
磁场耦合机构设计需要重点考虑线圈结构和装配位置两方面。无人机主要包含机身、起落架和外围机载设备三部分,根据接收线圈的装配位置,磁场耦合机构可分为装在无人机机身、无人机机身腹部以及起落架上三类,具体分析如下。
考虑到尽可能不增加无人机负重且不改变无人机外形,英国帝国理工学院学者提出用空心接收线圈替代无人机防撞架,如图7所示[8, 28]。发射端采用圆盘形发射线圈,接收线圈采用类圆盘形的接收线圈。此结构是一种轴对称结构,接收端相对轴心旋转时输出效果一致。然而,由于接收线圈处于和无人机机身相同的高度,大量磁通会穿过机身,对无人机形成强电磁干扰。
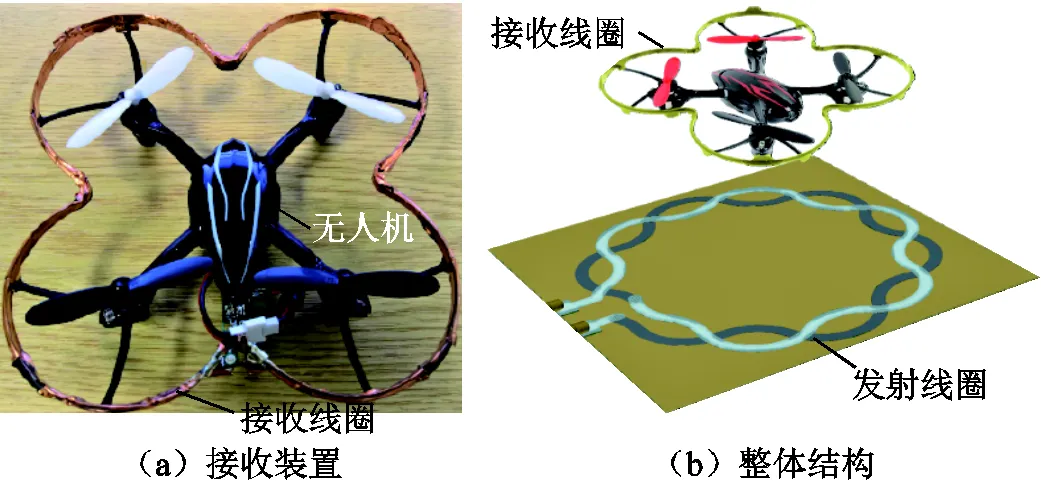
图7 装在无人机机身四周的圆盘式磁场耦合机构
华南理工大学[19]、武汉大学[20]、清华大学[29]、青岛理工大学[30]、哈尔滨工业大学[22-23]、马来西亚国民大学[31]等团队采用将平行式圆形接收线圈放置于无人机机身腹部的方案,如图8所示。通过缩短接收线圈与发射平面之间的气隙有效提升耦合效果,该方案对于各种外形的无人机都具有好的适用性。然而,文献[32]对该类型机构的磁场研究中发现,无人机机身同样会遭受强漏磁干扰。文献[22] 通过在接收线圈上方安装铝屏蔽环,有效遏制了漏磁干扰。然而,无人机腹部通常会搭载云台等外围设备,该类型机构会阻碍这些外围设备的安装。
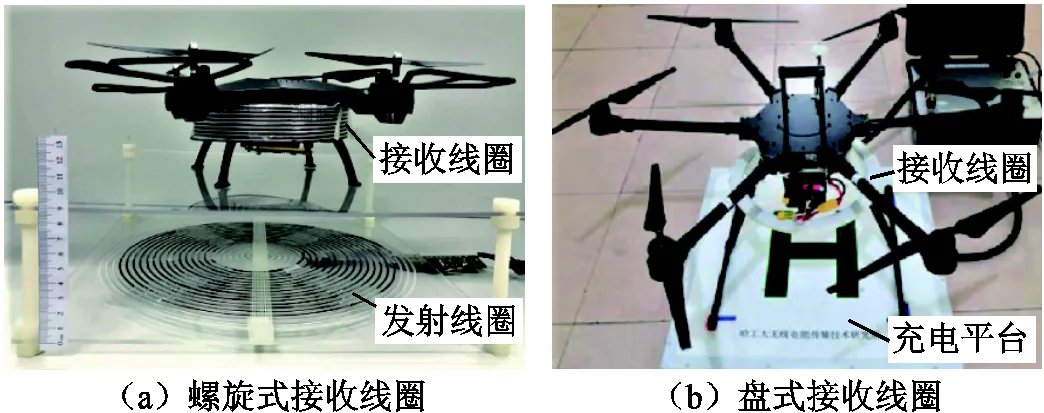
图8 装在无人机机身腹部的圆形磁场耦合机构
文献[33-34]提出一种将平行矩形盘式接收线圈放置于起落架底端的方案。大矩形接收线圈如图9a所示,发射端和接收端之间的距离被进一步压缩,然而起落架底端的接收平面势必会增加风阻。
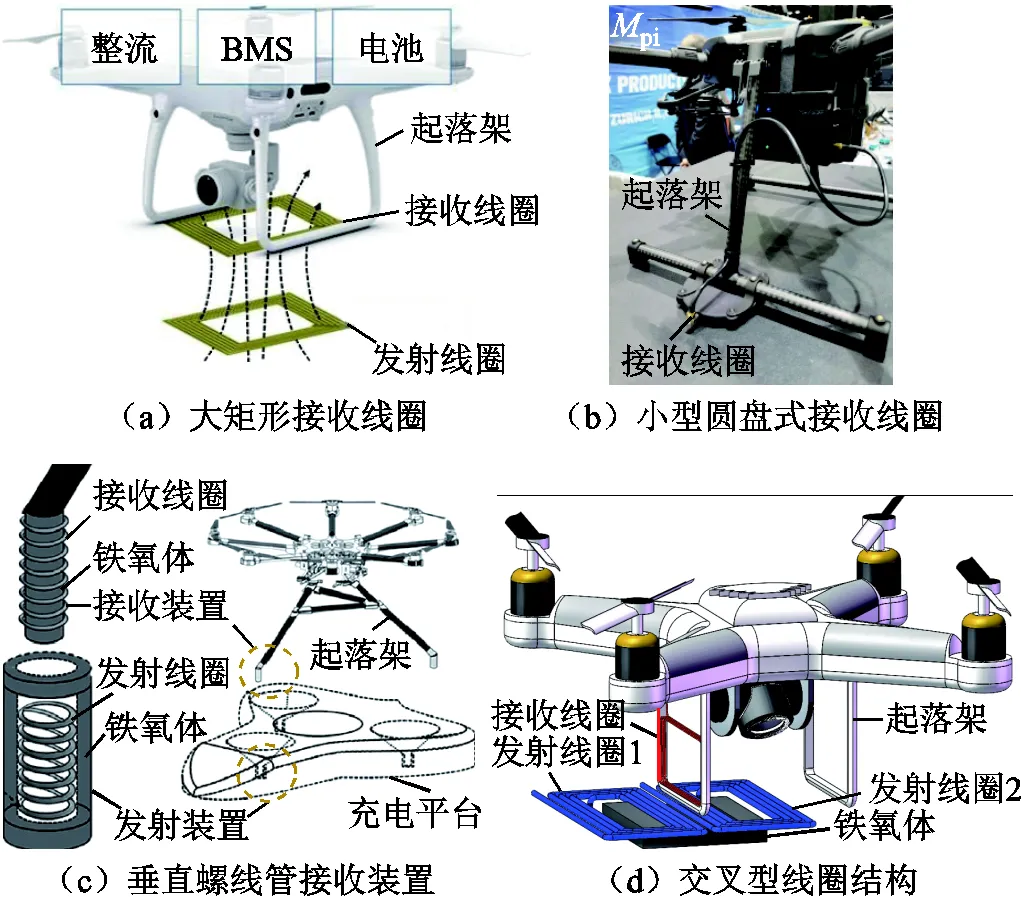
图9 装在无人机起落架底端磁场耦合机构
美国WiBotic公司提出在起落架底端放置小型圆盘接收线圈的方案,小型圆盘接收线圈如图9b所示[17]。该方案的体积小、质量轻,但耦合面小、线圈匝数少,仅适用于小功率场合。韩国KAIST提出一种垂直螺线管的接收装置,如图9c所示[16, 35]。该接收装置安装在无人机起落架底端,配合铁氧体的使用,有效降低了系统漏磁。但是,含铁氧体的接收装置易在无人机降落过程中损坏,而且该结构还需要改造无人机起落架。
哈尔滨工业大学学者针对无人机特殊外形,提出交叉型磁场耦合机构线圈结构,如图9d所示[25,36]。发射端采用双极性线圈结构,接收线圈沿着起落架的框架绕制,具有质量轻、对无人机结构适应性强的优势。文献[25]的样机系统成功对500 W无人机实施无线充电,整机效率90.8%。该团队还通过添加柔性磁材料,进一步压缩接收线圈的体积和质量[26]。尽管交叉型耦合机构在大、小功率场合都具有适用性,但对错位的适应性较差。
表2从传输功率、抗偏移性、电磁安全等方面对比了典型无人机磁场耦合机构。大型平行盘式耦合机构具有易安装、可传输功率大等优势,但漏磁干扰强;小型平行盘式磁场耦合机构仅在小功率场合具有适用性;螺线管式磁结构需改造无人机结构;交叉型磁场耦合机构的耦合能力强、可传输功率大,但抗偏移能力弱。综合上述分析,国内外研究团队已针对无人机无线充电的磁场耦合机构设计开展了的大量研究工作,提出一系列有的放矢的技术方案,但发展尚不成熟,还需加强该方面的研究,进一步提升磁场耦合机构性能。
表2 典型无人机无线充电的磁场耦合机构对比
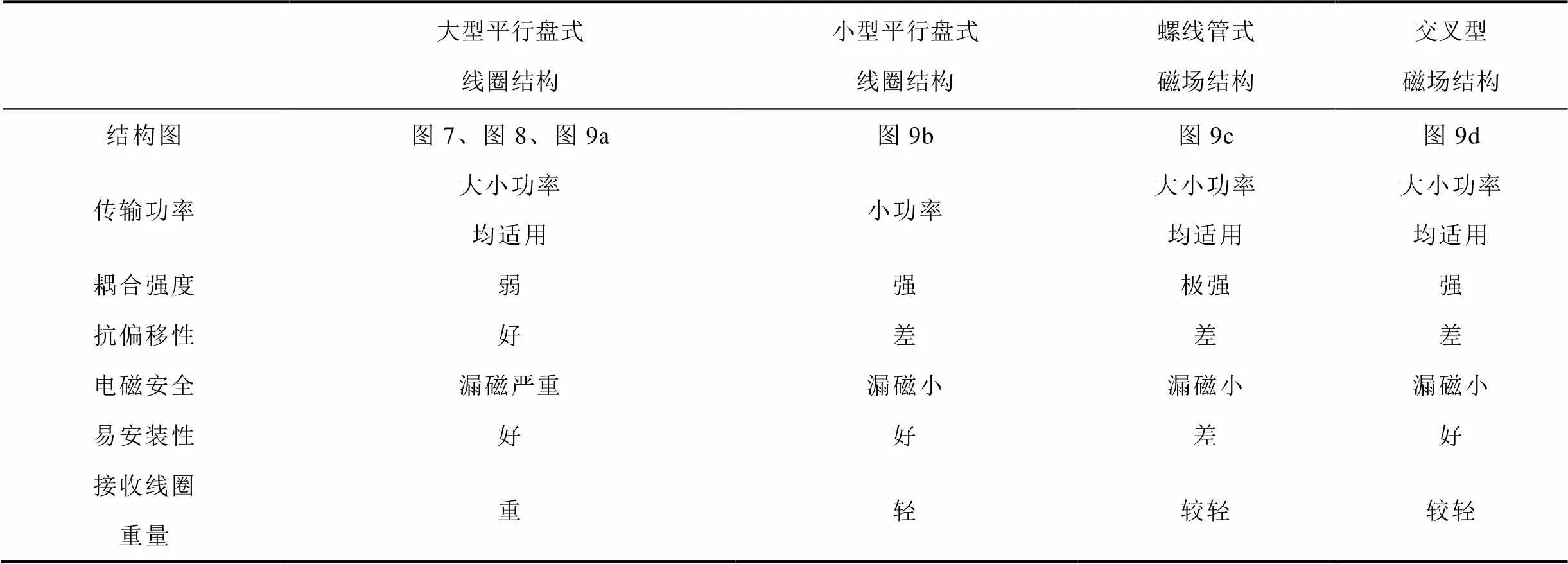
Tab.2 Comparison of typical magnetic coupler for UAV wireless charging
2)电场耦合机构
随着电力电子器件高频性能的不断提升,有学者开始尝试利用电场耦合原理开发无人机无线充电系统。耦合电容值是决定电场耦合无线充电系统功率和效率的重要参数,而极板耦合电容值为
式中,为极板间隙填充材料介电常数;为两极板的相对面积;为板板间距。可以得到,增加耦合电容可以考虑增大有效耦合面积、缩短间距及增大介质介电常数三个方面[37]。基于此原理,衍生出两种系统性能提升方案。第一种是缩短极板间距并且采用高介电常数的传输介质。日本九州大学学者[18, 38]利用覆盖聚酯薄膜的铝板作为发射极板,放置于起落架底端的四块方形金属片作为接收极板,研发了电场耦合无人机无线充电系统,如图10所示。该方案可以将极板间距缩减到1mm以下,样机系统传输功率为8W,传输效率77%。但接收极板装配位置决定了接收极板面积较小,可传输功率有限。
第二种增大耦合电容的思路是扩大极板面积,韩国KAIST提出一种有效耦合面积较大的电场耦合机构,如图10b所示[9]。一只盘形接收极板安装在无人机腹部,另一只环形接收极板安装在起落架中部。相应地,发射极板也由盘形和环形的极板构成。样机系统可传输功率100 W,耦合效率89.4%。该方案对提升传输功率有积极的作用。但充电平台需要一个高的凸起,这给平台的制作带来了困难,并且阻碍无人机腹部云台等设备安装。
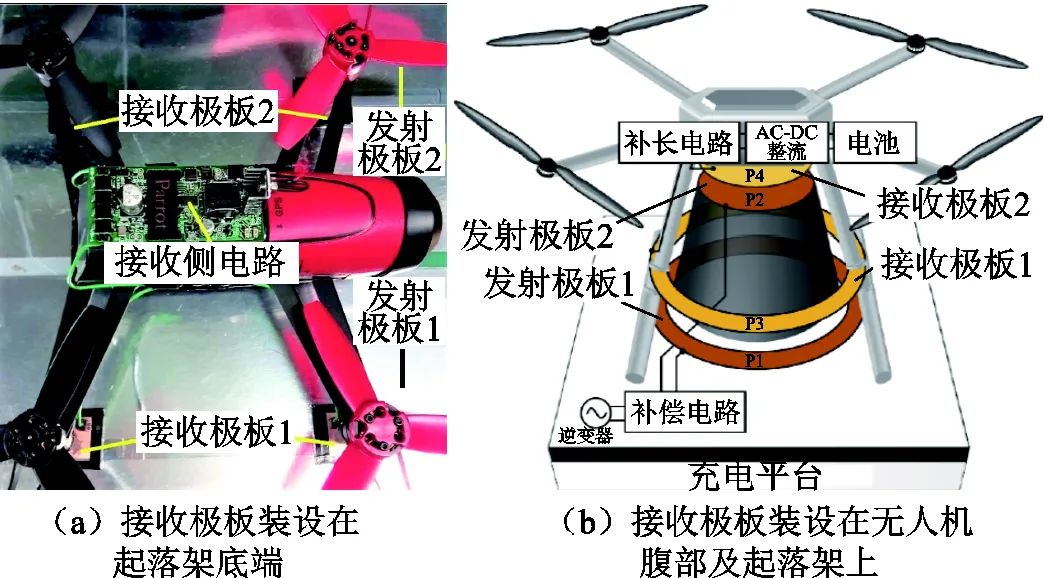
图10 应用于无人机无线充电的电场耦合机构
由于耦合极板具有结构简单、体积小、质量轻和成本低等优势,电场耦合式无线充电技术在无人机充电领域展现出广阔的应用前景,但当前对无人机的电场耦合机构研究还较为薄弱。有必要对无人机无线充电的电场耦合机构的结构和极板绝缘材料等方面开展进一步的研究。
2.2.2 错位应对方案
受充电平台机动、无人机降落精度不足、环境干扰和降落后回弹等多方面因素影响,接收装置与发射装置相对错位是无人机无线充电必然面对的问题[39]。当前无人机无线充电系统应对耦合线圈位置偏移方案主要有四种:增大发射线圈面积、采用阵列发射平台、采用位移辅助对准机构以及采用辅助无人机精确降落平台。
文献[14-15]通过增大发射线圈面积,扩大了发射磁通的作用范围,使得接收线圈在偏移时仍能处于发射线圈的磁场作用范围,如图11所示。该方案还支持多无人机同时充电。然而,该方案存在大量漏磁,导致效率低下。文献[14]的样机系统在错位过程中的平均工作效率仅有60%。
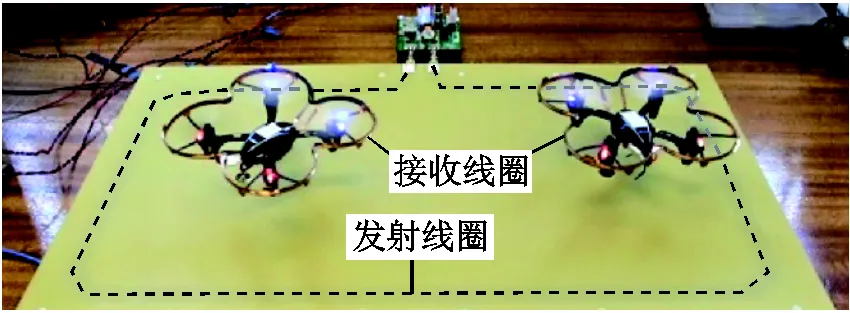
图11 大发射线圈对小接收线圈的错位应对方案
为提升充电区域的同时限制磁场作用空间,有学者提出了阵列线圈结构[21, 40-41]。如图12a所示,武汉大学学者提出一种由4个发射线圈对1个接收线圈的阵列耦合机构[21]。系统电路如图12b所示,通过检测接收线圈位置开启相应的发射线圈。不仅提升了错位适应性,还降低了实际工作中的磁场作用范围。然而位置检测需要添加复杂的硬件和软件系统[41],复杂性和成本较高,而且当前的位置检测方案在野外环境中的可靠性仍有待提高。
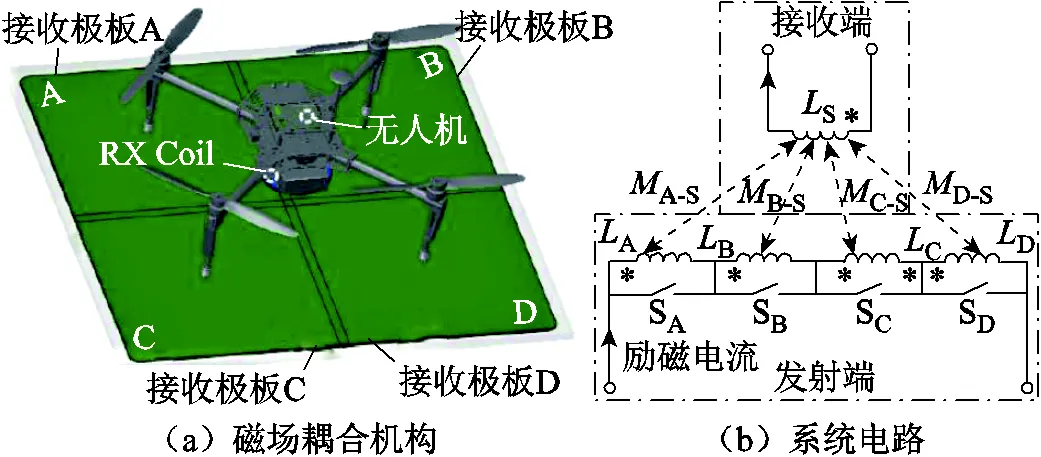
图12 基于阵列式发射平台的无人机无线充电系统
无人机降落后,利用位移式辅助对准机构移动发射线圈至无人机处,或者移动无人机至预置的发射线圈位置也同样是应对错位的有效方案。韩国国立群山大学学者[42]提出一种基于发射线圈位移的辅助对准方案,如图13a所示。发射线圈可以沿轴和轴方向移动实现对准,但需要预先检测接收线圈的位置。哈尔滨工业大学学者[26]提出一种移动无人机至发射线圈的方案,如图13b所示。该方案无需检测无人机降落位置,具有简单、可靠的优势,但平台上方的机械装置使得平台无法完全密封,不便于在潮湿、风沙较大等恶劣工况下使用。
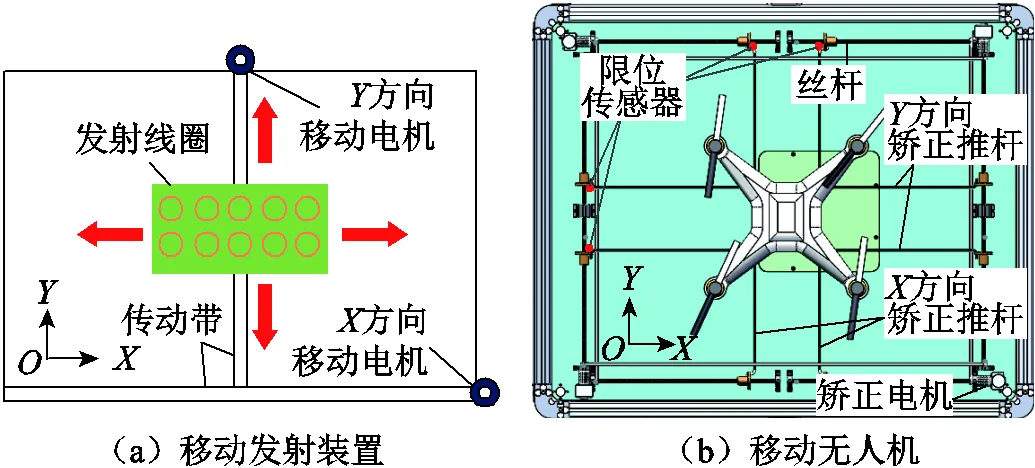
图13 基于位移式辅助对准机构的错位应对方案
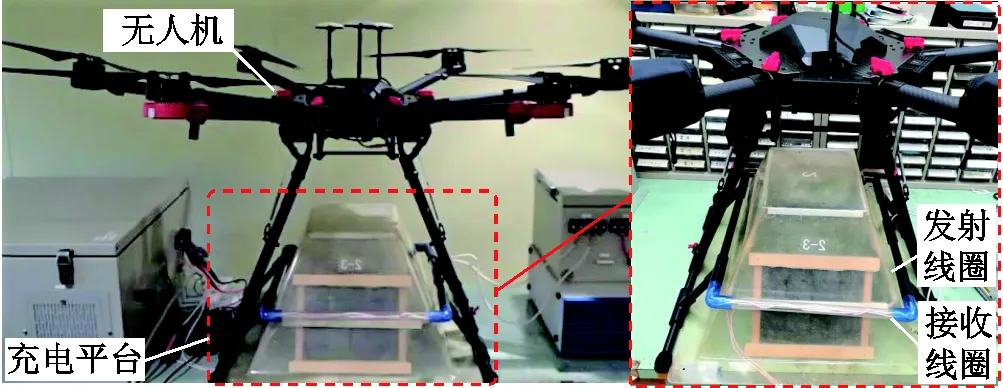
图14 基于锥形凸起结构的无人机精确降落平台
通过以上分析可发现:增大发射线圈面积、采用阵列式发射平台、位移式辅助对准机构及辅助无人机精确降落平台均是无人机无线充电领域有效的错位应对方案,表3汇总了四种方案的部分优缺点,以供实际方案选择。
表3 四种错位应对方案优缺点分析
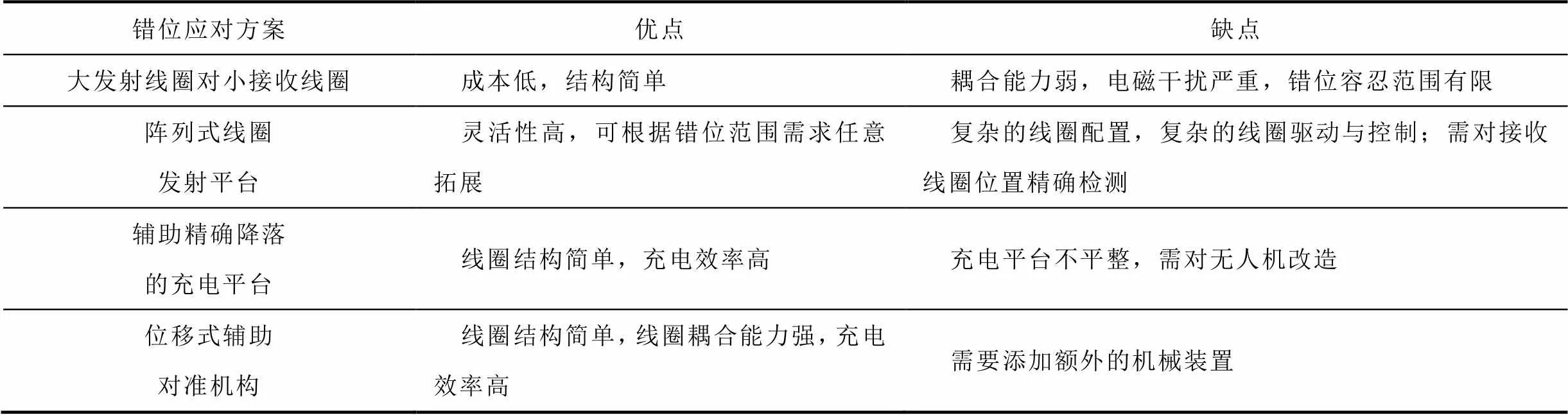
Tab.3 Analysis of advantages and disadvantages of four schemes for coping with the misalignment
3 无人机无线充电技术应用展望与待解决的关键问题
3.1 无人机无线充电技术应用展望
3.1.1 基于固定巡检线路的无人机无线充电系统
固定巡检线路的巡检任务可以是电力线路巡检、风电场巡检等。受无人机续航能力有限、作业距离短等问题影响,当前无人机巡检的使用频率仍较低。由于多数远距离巡检任务都具有条件艰苦、单次巡检工作量大、需周期性巡检等特点,如果在固定巡检路线布置中继无人机无线充电基站,无人机在执行任务过程中自主降落至中继充电站补充电能,可有效拓展无人机的巡检范围、提升无人机巡检的工作效率和使用频率,这对降低巡检成本、提升巡检质量具有重要意义。
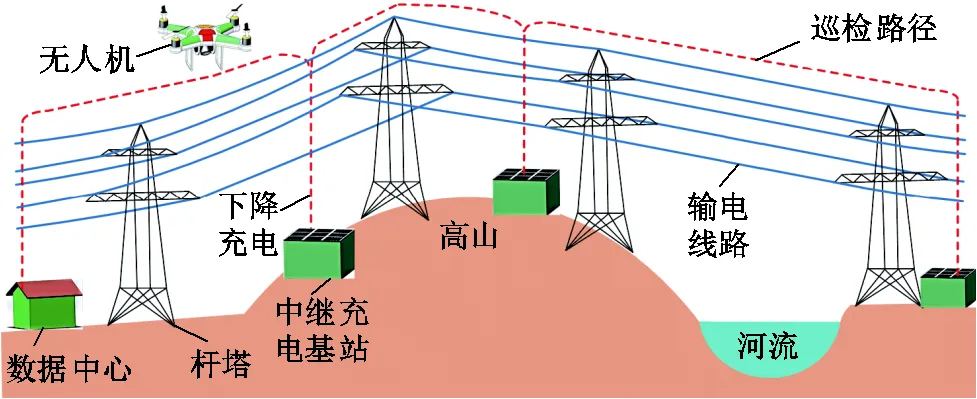
图15 用于固定巡检线路的无人机无线充电系统
3.1.2 基于移动充电平台的无人机无线充电系统
在无人车、海洋浮台和无人船等智能无人机装备上搭载无人机,可以利用无人机的特殊视角在紧急情况下快速升空调查取证,从而实现陆地-领空、海洋-领空之间的装备联合。基于移动充电平台的无人机无线充电系统如图16所示,在这种场合下,无人机大部分时间位于机载的移动式平台上静默等待,等待过程中可利用无线充电技术对无人机及时补充电能,确保无人机下次任务有序进行。
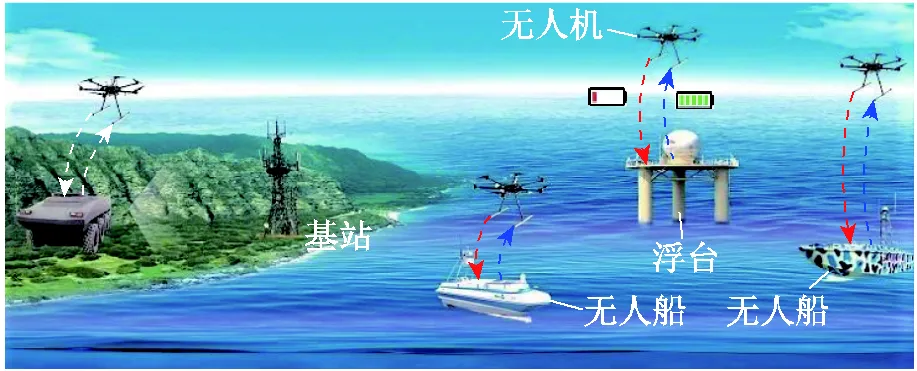
图16 基于移动充电平台的无人机无线充电系统
3.2 待解决的关键问题
尽管无人机无线充电技术在未来无人值守场景中具有广阔的应用前景,但由于研究还不够充分,目前仍存在一些关键问题尚待解决。
3.2.1 高性能耦合机构研究
无人机结构异型,负重能力极为受限,抗电磁干扰能力弱。无人机无线充电耦合机构需要具备对无人机结构适应性强、功率传递能力大、易安装、体积小、质量轻、电磁干扰弱的特点。由于无人机无线充电面临上述特殊性,目前已开发的耦合机构仅能满足其中部分性能,还需要对适用于无人机特殊应用场合的高性能耦合机构加强研究。
3.2.2 随机落点位置和随机降落方向下可靠高效充电的错位容忍能力提升
歌词记忆不清,现从网上搜索;旋律印象深刻,久久挥之不去。过去,听别人说深圳,繁华、创新、国际化,今天,大寻访团队来到深圳,每天紧张采访,近距离感受别样深圳的创业年代。
受降落精度、环境因素及降落回弹等多方面因素综合影响,无人机的落点位置和方向呈现随机性。如何确保无人机在随机位置、随机方向下可靠高效充电,是必须攻克的关键问题。当前扩大发射线圈直径的方法存在效率低的问题,辅助对准存在无法对充电平台密封封装以及恶劣工况下的失效概率大的弊端。因此,如何结合实际应用特点,从耦合机构、谐振补偿网络和系统控制等方面入手,以优先提升无人机在随机落点随机方向下的高效充电能力,是无人机无线充电需要解决的一个重要技术问题。
3.2.3 可互操作性问题研究
受所采用的线圈结构、补偿网络、功率等级等因素影响,互操作性已成为无线充电领域产品实用化和规模化应用的关键环节。互操作性问题在无人机无线充电领域尤为重要,因为不同种类的无人机结构差异明显、外形尺寸差异大、功率等级众多,这对无人机无线充电系统的兼容性、互联互通提出了较高的要求。
3.2.4 基于移动平台的无人机无线充电技术研究
随着无人机在军事、海洋观测等领域的应用,充电平台动态移动已成为无人机无线充电必须面临的重要问题。移动的充电平台造成更大的相对错位范围,降落后的角度也不再能够保证,而且充电过程中可能还面临平台振动引起的动态错位和动态气隙变化。这对系统的安全性、可靠性和传能稳定性提出了新的要求,需要针对该应用特点有针对性的开展研究。
3.2.5 满足多无人机同时充电的平台技术研究
集群无人机具有联合作战、突防能力强等优势,已成为无人机领域的一种重要的应用场景。集群无人机的充电系统具有充电目标数量众多、多无人机同时并行充电的特点。对充电单元的成本约束、充电单元之间的相互干扰抑制,以及充电系统整体功率和效率提升提出更高的要求,但目前还缺乏相关方面的研究。
4 结论
无线充电技术是提升无人机在未来无人值守化场景应用的有力保障,该技术的研究对拓展无人机执行任务范围、提升系统智能化水平具有重要的意义。本文综述了当前无人机无线充电方面所取得的研究成果和发展概况;重点从磁场耦合式和电场耦合式两种无人机无线充电技术出发,介绍了目前无人机无线充电中耦合机构和错位应对措施两个关键技术的研究现状;并就无人机无线充电未来发展及有待研究的问题进行了讨论。可以看到,无人机无线充电技术正在得到深入研究,而且可以预计该技术将会获得更广泛的研究、应用和发展。
[1] Boukoberine M, Zhou Zhibin, Benbouzid M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects[J]. Applied Energy, 2019, 255(1): 113823-113878.
[2] 马东立, 张良, 杨穆清, 等. 超长航时太阳能无人机关键技术综述[J]. 航空学报, 2020, 41(3): 34-63.
Ma Dongli, Zhang Liang, Yang Muqing, et al. Review of key technologies of ultra-long-endurancesolar powered unmanned aerial vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(3): 34-63.
[3] Lee D, Zhou J, Lin W. Autonomous battery swapping system for quadcopter[C]//2015 International Conference on Unmanned Aircraft Systems, Denver, USA, 2015: 118-124.
[4] Alobaidi M, Mustafa M, Hasan W, et al. Efficient charging pad for unmanned aerial vehicle based on direct contact[C]//2018 IEEE 5th International Conference on Smart Instrumentation, Measurement and Application, Songkhla, Thailand, 2018: 1-5.
[5] 蔡春伟, 武帅, 张言语, 等. 基于弧形线圈结构的无线充电系统能量传输与控制[J].电工技术学报, 2020, 35(14): 2959-2968.
Cai Chunwei, Wu Shuai, Zhang Yanyu, et al. Power transfer and control of wireless charging system based on an arc coil structure[J]. Transactions of China Electrotechnical Society, 2020, 35(14): 2959-2968.
[6] 尹成科, 徐博翎. 植入式人工心脏无线电能传输研究进展[J]. 电工技术学报, 2015, 30(19): 103-109.
Yin Chengke, Xu Bolin. Wireless power transfer for implantable ventricular assistance: a review[J]. Transactions of China Electrotechnical Society, 2015, 30(19): 103-109.
[7] 薛明, 杨庆新, 章鹏程, 等. 无线电能传输技术应用研究现状与关键问题[J]. 电工技术学报, 2021, 36(8): 1547-1568.
Xue Ming, Yang Qingxin, Zhang Pengcheng, et al. Application status and key issues of wireless power transmission technology[J]. Transactions of China Electrotechnical Society, 2021, 36(8): 1547-1568.
[8] Aldhaher S, Mitcheson P D, Arteaga J M, et al. Light-weight wireless power transfer for mid-air charging of drones[C]// 2017 11th European Conference on Antennas and Propagation, Paris, France, 2017: 336-340.
[9] Park C, Park J, Shin Y, et al. Separated circular capacitive coupler for reducing cross-coupling capacitance in drone wireless power transfer system[J]. IEEE Transactions on Microwave Theory and Techniques, 2020, 68(9): 3978-3985.
[10] Boukoberine M, Zhou Zhibin, Benbouzid M. Power supply architectures for drones-a review[C]// IECON 2019 - 45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 2019: 5826-5831.
[11] 范兴明, 高琳琳, 莫小勇, 等. 无线电能传输技术的研究现状与应用综述[J]. 电工技术学报, 2019, 34(7): 1353-1380.
Fan Xingming, Gao Linlin, Mo Xiaoyong, et al. Overview of research status and application of wireless power transmission technology[J]. Transactions of China Electrotechnical Society, 2019, 34(7): 1353-1380.
[12] Liu Yi, Qiu Ming, Hu Jinlei, et al. Incentive UAV-enabled mobile edge computing based on microwave power transmission[J]. IEEE Access, 2020, 8(1): 28584-28593.
[13] Brown W. Experiments involving a microwave beam to power and position a helicopter[J]. IEEE Transactions on Aerospace and Electronic Systems, 1969, AES-5(5): 692-702.
[14] Arteaga J, Aldhaher S, Kkelis G, et al. Dynamic capabilities of multi-MHz inductive power transfer systems demonstrated with batteryless drones[J]. IEEE Transactions on Power Electronics, 2019, 34(6): 5093-5104.
[15] Campi T, Cruciani S, Maradei F, et al. Wireless charging system integrated in a small unmanned aerial vehicle (UAV) with high tolerance to planar coil misalignment[C]// 2019 Joint International Symposium on Electromagnetic Compatibility, Sapporo and Asia-Pacific International Symposium on Electromagnetic Compatibility, Sapporo, Japan, 2019: 601-604.
[16] Song C, Kim H, Kim Y, et al. EMI reduction methods in wireless power transfer system for drone electrical charger using tightly coupled three-phase resonant magnetic field[J]. IEEE Transactions on Industrial Electronics, 2018, 65(9): 6839-6849.
[17] Waters B. Systems and methods of electrically powering devices: USA, US0339259[P]. 2020-10-29.
[18] Muharam A, Mostafa T, Hattori R. Design of power receiving side in wireless charging system for UAV application[C]//2017 International Conference on Sustainable Energy Engineering and Application, Jakarta, Indonesia, 2017: 1-7.
[19] Zhou Jiali, Zhang Bo, Xiao Wenxun, et al. Nonlinear parity-time-symmetric model for constant efficiency wireless power transfer: application to a drone-in-flight wireless charging platform[J]. IEEE Transactions on Industrial Electronics, 2019, 66(5): 4097-4107.
[20] Yang Chuankai, He Yuanjian, Qu Haoyue, et al. Analysis, design and implement of asymmetric coupled wireless power transfer systems for unmanned aerial vehicles[J]. AIP Advances, 2019, 9(2): 1-11.
[21] Cai Changsong, Wang Junhua, Nie Hui, et al. Effective-configuration WPT systems for drones charging area extension featuring quasi-uniform magnetic coupling[J]. IEEE Transactions on Transportation Electrification, 2020, 6(3): 920-934.
[22] Song Kai, Zhang Peng, Chen Zhengxin, et al. A high-efficiency wireless power transfer system for unmanned aerial vehicle considering carbon fiber body[C]// 2020 22nd European Conference on Power Electronics and Applications, Lyon, France, 2020: 1-7.
[23] Yan Yixin, Shi Wan, Zhang Xiaobing, et al. Design of UAV wireless power transmission system based on coupling coil structure optimization[J]. EURASIP Journal on Wireless Communications, 2020, 2020(1): 1-13.
[24] 马秀娟, 武帅, 蔡春伟, 等. 应用于无人机的无线充电技术研究[J]. 电机与控制学报, 2019, 23(8): 1-9.
Ma Xiujuan, Wu Shuai, Cai Chunwei, et al. Research on wireless charging technology applied to UAVs[J]. Electric Machines and Control, 2019, 23(8): 1-9.
[25] Cai Chunwei, Wu Shuai, Jiang Longyun, et al. A 500-W wireless charging system with lightweight pick-up for unmanned aerial vehicles[J]. IEEE Transactions on Power Electronics, 2020, 35(8): 7721-7724.
[26] Wu Shuai, Cai Chunwei, Jiang Longyun, et al. Unmanned aerial vehicle wireless charging system with orthogonal magnetic structure and position correction aid device[J]. IEEE Transactions on Power Electronics, 2021, 36(7): 7564-7575.
[27] Cai Chunwei, Wu Shuai, Qin Mu, et al. A novel magnetic coupler for unmanned aerial vehicle wireless charging systems[C]// 2018 IEEE International Power Electronics and Application Conference and Exposition, Shenzhen, China, 2018: 1-5.
[28] Arteaga J, Lan L, Aldhaher S, et al. A Multi-MHz IPT-link developed for load characterisation at highly variable coupling factor[C]// 2018 IEEE Wireless Power Transfer Conference, Montreal, Canada, 2018: 1-4.
[29] Song Yiqi, Sun Xinya, Wang Haixia, et al. Design of charging coil for unmanned aerial vehicle-enabled wireless power transfer[C]// 2018 8th International Conference on Power and Energy Systems, Colombo, Sri Lanka, 2018: 268-272.
[30] Zhang Hailong, Chen Yafei, Jo C, et al. DC-link and switched capacitor control for varying coupling conditions in inductive power transfer system for unmanned aerial vehicles[J]. IEEE Transactions on Power Electronics, 2021, 36(5): 5108-5120.
[31] Jawad A, Jawad H, Nordin R, et al. Wireless power transfer with magnetic resonator coupling and sleep/active strategy for a drone charging station in smart agriculture[J]. IEEE Access, 2019, 7(1): 139839-139851.
[32] Campi T, Dionisi F, Cruciani S, et al. Magnetic field levels in drones equipped with Wireless Power Transfer technology[C]//Asia-pacific International Symposium on Electromagnetic Compatibility, Shenzhen, China, 2016: 544-547.
[33] Ke Dawen, Liu Chunhua, Jiang Chaoqiang, et al. Design of an effective wireless air charging system for electric unmanned aerial vehicles[C]// IECON 2017 - 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 2017: 1-6.
[34] Park B, Park J, Shin Y, et Al. Wireless charging system using soft magnetic composite for unmanned aerial vehicle[J]. International Journal of Communications, 2017, 2(1): 59-62.
[35] Song C, Kim H, Kong S, et al. Low EMF three phase resonant magnetic field charger for drone with high Q reactive loop shielding[C]//2016 IEEE Wireless Power Transfer Conference, Aveiro, Portugal, 2016: 1-4.
[36] 蔡春伟, 姜龙云, 陈轶, 等. 基于正交式磁结构及原边功率控制的无人机无线充电系统[J]. 电工技术学报, 2021, DOI: 10.19595/j.cnki.1000-6753.tces. L90093.
Chunwei Cai, Longyun Jiang, Yi Chen, et al. Wireless charging system of UAV based on orthogonal magnetic structure and primary power control[J]. Transactions of China Electrotechnical Society, 2021, DOI: 10.19595/j. cnki.1000-6753.tces.L90093.
[37] 苏玉刚, 傅群锋, 马浚豪, 等. 电场耦合电能传输系统层叠式耦合机构漏电场抑制方法[J]. 电力系统自动化, 2019, 43(2): 130-136.
Su Yugang, Fu Qunfeng, Ma Junhao, et al. Fringing electric field suppression method of electric-field coupled power transfer system with four-plate coupler[J]. Automation of Electric Power Systems, 2019, 43(2): 130-136.
[38] Mostafa T, Muharam A, Hattori R. Wireless battery charging system for drones via capacitive power transfer[C]// 2017 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer, Chongqing, China, 2017: 1-6.
[39] Sang K, Inkui C, Sung H. Comparison of charging region differences according to receiver structure in drone wireless charging system[C]//2017 International Conference on Information and Communication Technology Convergence, Jeju, Korea, 2017: 1058-1060.
[40] 罗成鑫, 丘东元, 张波, 等. 多负载无线电能传输系统[J]. 电工技术学报, 2020, 35(12): 2499-2516.
Luo Chengxin, Qiu Dongyuan, Zhang Bo, et al. Wireless Power Transfer System for Multiple Loads[J]. Transactions of China Electrotechnical Society, 2020, 35(12): 2499-2516.
[41] Li Jianchao, Yin Fanghui, Wang Liming, et al. Electromagnetic induction position sensor applied to anti-misalignment wireless charging for UAVs[J]. IEEE Sensors Journal, 2020, 20(1): 515-524.
[42] Rohan A, Rabah M, Talha M, et al. Development of intelligent drone battery charging system based on wireless power transmission using hill climbing algorithm[J]. Applied system innovation, 2020, 1(4): 1-19.
[43] Obayashi S, Kanekiyo Y, Shijo T. UAV/drone fast wireless charging frp frustum port for 85-kHz 50-V 10-A inductive power transfer[C]//2020 IEEE Wireless Power Transfer Conference, Seoul, Korea, 2020: 1-4.
Research Progress and Development Trend of Multi-Rotor Unmanned Aerial Vehicles Wireless Charging Technology
Wu Shuai1,2Cai Chunwei1Chen Yi3Chai Wenping1Yang Shiyan2
(1. School of New Energy Harbin Institute of Technology-Weihai Weihai 264209 China 2. School of Electrical Engineering and Automation Harbin Institute of Technology Harbin 150001 China 3. 92578 Unit of the PLA Beijing 100161 China)
With the popularization of multi-rotor unmanned aerial vehicles (UAVs) in many fields, the research on the UAV wireless charging has attracted more and more attention. In this paper, the research and development status of the UAV wireless charging technology are reviewed. Firstly, the working principle and system structure of the UAV wireless charging system based on three different mechanisms are summarized. Secondly, two hot issues of near-field coupling UAV wireless charging, namely magnetic field coupling and electric field coupling, are classified and elaborated, which are mainly divided into coupler design and misalignment coping solution. Finally, the future prospect of the UAV wireless charging technology is presented, and the key problems to be solved are discussed.
Multi-rotor unmanned aerial vehicles (UAV), wireless charging, coupler, misalignment
10.19595/j.cnki.1000-6753.tces.201529
TM724
国家自然科学基金(52177002)和山东省自然科学基金(ZR2019MEE052)资助项目。
2020-11-18
2021-08-11
武 帅 男,1995年生,博士生研究生,研究方向为智能无人装备无线充电技术。E-mail:wushuai013@163.com
蔡春伟 男,1977年生,副教授,博士生导师,研究方向为无线电能传输技术和电力电子功率变换技术。E-mail:caichunwei@hit.edu.cn(通信作者)
(编辑 郭丽军)