多功能智能垃圾桶结构设计和功能实现
2022-02-21张佳佳陈思思
于 雯,王 艳,张佳佳,陈思思
(泰州职业技术学院,江苏 泰州 225300)
0 引言
我国人民对于垃圾分类的意识在逐步增强,但是目前我们投掷垃圾时,仅仅可以区分可回收和不可回收垃圾,而且大部分人对可回收和不可回收的概念还不明确,无法对垃圾进行主动的、有针对性的、初步的分类,导致分类垃圾桶在应用时形同虚设,垃圾分类的普及程度不高,无法实现垃圾的有效分类,大量的可回收资源无法回收,从而造成大量的资源浪费。
而市场上常见的智能垃圾箱做到了投掷的智能化,但是仅仅是具有红外感应自动打开垃圾桶盖的功能,严格意义上讲这不属于智能垃圾桶,无法实现普及而且性价比低[1-3]。如果能设计一款垃圾桶,能够实现垃圾的自动检测,区分和存放,不仅能实现资源的二次利用,对于环境保护、智慧城市建设也有积极意义。
因此以实现垃圾的分类存放和检测为目的,采用三维设计软件进行垃圾桶机械结构设计,采用铝合金材质进行垃圾桶机械部件的加工,安装;基于PLC和多传感器技术[3,4]开发一款智能垃圾桶,针对绝大部分垃圾,比如金属、纸制品、塑料、玻璃瓶等垃圾进行分类;应用太阳能发电技术,解决垃圾桶日常用电问题;检测垃圾容量,采用无线通信技术,当垃圾桶达到一定容量时,发出警告,并通知相关人员进行垃圾处理;实现垃圾的初步自动分离。
1 研究技术方法
1.1 城市源头可回收垃圾的检测指标
通过调研、查阅相关资料[6-8],考虑到技术实现的可能性,将垃圾分类为金属垃圾、玻璃垃圾、塑料垃圾、纸张垃圾和其他垃圾。金属垃圾的检测可以通过金属传感器;源头垃圾中纸张主要为白色纸张和黄色包装盒,通过颜色传感器可以判定;塑料和玻璃垃圾主要为饮料瓶和啤酒瓶,其中塑料垃圾占比较大,针对这两种垃圾的分类,基于工业相机的有效高精度的学习能力,采用图像识别的方式进行检测,通过定义形状和颜色并进行综合判定。
1.2 研究技术路线
选择合适传感器,首先制定垃圾检测方案,传感器选型确定垃圾检测方法;采用三维设计软件SolidWorks进行垃圾桶机械结构设计,确定垃圾桶形状,选取合适的电机和传动装置,合理布置垃圾桶内部筒体、电源、电机、电缸等结构位置;将太阳能发电技术应用到智能垃圾桶的设计中,制作匹配的太阳能电路板,同时解决太阳能电板与智能垃圾桶的各个部件之间能量的传输和利用问题;结合PLC、无线通信以及传感器技术进行程序开发、功能调试,并根据测试结果对垃圾桶的结构、程序进行优化,最终实现垃圾识别和分拣以及自动报警功能。项目研究技术路线如图1所示。

图1 项目研究技术路线
2 总体设计
2.1 机械结构设计
要实现垃圾的自动分类,必须设计科学的机械装备,配合传感器和PLC控制。采用三维设计软件SolidWorks进行垃圾桶机械结构设计,采用铝合金材质进行垃圾桶机械部件的加工,安装,保证检测到不同垃圾的同时,机械部件配合得当,对应垃圾精确入箱,实现垃圾分类存放。
垃圾桶检测和分拣系统箱体结构为矩形,内部设置5个筒体,分别存放5种垃圾。智能垃圾箱采用太阳能发电装置给垃圾箱供电,垃圾桶顶面为4块电池板的安装位置,用于太阳能的获取并提供电源,解决电源的供应问题;垃圾桶上方设置2个垃圾投放入口,箱体外设置红外传感器,当检测到垃圾投掷时,垃圾箱箱门自动打开;箱型投掷入口内设置多个传感器进行垃圾的种类检测;箱型投掷入口下方设置挡料板,采用电缸驱动控制挡料板开合;在垃圾桶筒体下方设计机械转盘,用于支撑筒体重量,同时根据传感器检测结果,上方电缸控制挡料盘开启,同时下方蜗杆传动装置带动转盘转动,将不同种类垃圾自动存放对应垃圾小桶内,实现垃圾的自动识别和自动存放。垃圾桶结构如图2所示。

图2 垃圾桶结构图
2.2 控制系统方案设计
控制系统由检测模块、电源模块、运动控制模块和执行模块组成。电源模块由太阳能电池板和24 V直流蓄电池组成,4块PET型6 V/6 W太阳能板通过串联的方式持续给蓄电池供电,实现太阳能和电能的转换,太阳能板和蓄电池之间设置SYC-L10型太阳能电池板控制器,用于检测太阳能板的运行情况和当前电压;检测模块包括光纤传感器,金属传感器,电容式接近开关,光纤传感器采用PRS-310型的光纤放大器探头和YIBO-NA41型号光纤放大器组成,安装在垃圾桶的入料盖右侧,用于判断是否有人投放垃圾。金属传感器采用LJC18A3-B- Z/EX-NPN型直流常开传感器,放置于检测区域下测用于检测判断金属垃圾,电容式传感器采用LJC18A3-B-Z/BX型支流敞开传感器;运动控制模块采用西门子S7-224-cn型PLC控制器,对信号进行采集、接受、处理和控制,数据存储器具有12288 字节,适用电源为24 V直流电源,PLC 的内部构成主要为中央处理器 CPU、存储器和编程器。输入输出接口数量分别为 14 个和 10 个,输入接口将各种信号转化为标准逻辑电平,输出接口则输出电信号。执行模块为直流电机:参数为25GA-370、步进电机:参数为普菲德57BYG250H 、转矩2.8N、 步距角1.8°,驱动挡料板和转盘机构运动。控制系统组成如图3所示。
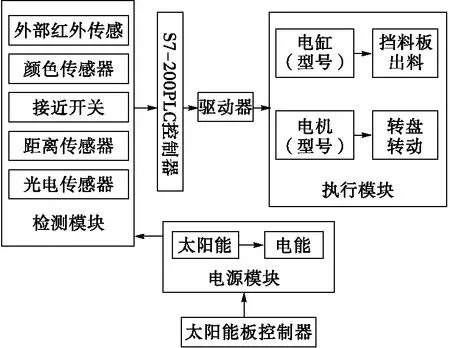
图3 智能垃圾桶控制系统
3 PLC程序控制
3.1 软件设计
该系统软件主要由信号采集模块和主控制模块两部分组成,信号采集模块将信号送至 PLC,PLC 执行相应的程序,通过控制步进电机和电缸协同工作,完成垃圾的投放、识别和存储等一系列动作,程序流程如图4所示。

图4 控制程序流程图
程序执行之前,运行初始化程序,复位所有元器件,步进电机回到原点位置。当需要投掷垃圾时,程序开始执行。光纤传感器检测识别距离,确认需要投掷垃圾,PLC接受信号,启动电机,控制开启入料盖,完成投掷过程。
垃圾检测按照金属、纸张、塑料、玻璃的顺序依次进行。箱体内金属传感器优先检测是否为金属,如果检测到是金属垃圾,PLC接收信号,输出金属仓所需的步进脉冲数,步进电机驱动器驱动带动相应机械结构部分(转盘)转动,将垃圾存放至金属垃圾桶内。完成后,复位除步进外的所有电机以及PLC内部变量,完成金属垃圾入料环节。
将黄色包装盒和白色纸张作为第二检测对象,采用颜色传感器检测。
塑料和玻璃的检测采用基恩士IV2-G500CA型工业相机检测,其具备清晰高速处理图像的能力,保证的检测的精度和速度。首先锁定检测位置,设定判断条件为瓶体轮廓,设定轮廓识别进行初步判定,用传感器观察物体追加瓶盖颜色面积作为条件识别。如果所有传感器都检测不到,定义为其他垃圾。确定为相对应垃圾之后PLC接收信号,输出对应垃圾箱所需的步进脉冲数,步进电机驱动器驱动电机旋转至对应位置。完成后,复位除步进外的所有电机和PLC内部变量。完成垃圾入料环节。控制程序流程,如图4所示。在这个过程中,合理的调整检测距离是垃圾分类的关键技术。
同时每个垃圾内设计红外传感器,检测向内垃圾容量,距离达到一定范围内,启动警报系统,基于GSM无线通信模块发送垃圾箱位置提醒相关人员更换垃圾箱,节省了人力。
3.2 试验验证
基于以上设计和理论,为了验证垃圾智能检测方案的合理性,研制的试验样机如图5所示。

图5 试验样机
选取了金属、黄白纸张、塑料瓶、玻璃瓶不同形态、大小各30份进行的试验。通过统计,对应检测准确性分别为98%,83%,83%,70%;分析原因,垃圾投掷时与传感器的距离、垃圾的形状都会影响识别精度,检测平均准确性为84.5%,垃圾识别准确度较好,机械结构运转正常。
3.3 需要说明的问题
(1)研发初期设定的目标在技术能实现的前提下,实现大部分可回收垃圾的自动检测,但是不是全部,由于技术的限制和传感器的检测精度的问题,还需不断改进,并增加检测样本。
(2)设定的可检测的可回收垃圾样本,其存在误检测的概率,比如颜色识别检测纸张时,白色塑料瓶可能被检测为纸张,但是考虑到白色塑料瓶毕竟为少数,检测误差不大;通过扩大样本数量和增加样本的典型性特征,修正检测误差;金属的检测精度最高且稳定。
(3)视觉传感器采用基恩士传感器,检测精度较高,检测稳定性好,因此对于塑料和玻璃的检测采用视觉传感器,采用形状和颜色结合识别的方法,检测的精度较好,有效开发了视觉多传感器的学习能力。但是对于这2种垃圾的区分,力求找到更加有效的界定方式,比如条形码输入。
4 结论
(1)垃圾分类存放机械装置。根据垃圾分类检测方案,采用三维设计软件进行机械结构设计,将智能垃圾桶分成5个区域进行不同垃圾的存放,结合机械连杆设计、异步电机选择、传感器的检测位置选择以及PLC的应用,设计出合理的智能垃圾桶结构,能够实现垃圾的投放、检测和分拣。
(2)太阳能供电技术。将太阳能供电技术应用到智能垃圾桶,不仅解决的电源的供应问题,也是我们大力提倡的清洁能源应用的方向。太阳能电板与智能垃圾桶的各个部件之间能量的传输和利用是技术亮点,解决的垃圾桶能量供应的问题,更能广泛推广。
(3)多传感器配合实现垃圾检测。垃圾的分拣需要多个传感器相互配合,传感器的选择是智能垃圾桶的关键技术。通过数据统计归纳,垃圾检测的准确性为84.5%,金属垃圾的检测准确性最高。需要说明的是,由于垃圾种类繁多,无法进行细化,对样机进行试验,样本来源于生活中常见的垃圾,系统实现大部分垃圾的初步分类。
