四旋翼无人机控制系统设计
2022-02-21王晓银张旭李稼祥李龙任建伟
王晓银, 张旭, 李稼祥, 李龙, 任建伟
(西安航空学院,计算机学院,陕西,西安 710000)
0 引言
四旋翼无人机具有体积小、集成度高、易于操作等优点,广泛应用于军事、警力、农业、地质、气象、物流、抢险等领域[1]。本文对目前各种四旋翼无人机控制算法进行了研究与分析,并结合当前的发展需求,设计了一款基于STM32微控制器的四旋翼无人机控制系统。该控制系统具有低功耗、低成本,高响应速度等优点,能快速、灵活地完成机动作业。
1 四旋翼无人机概述
1.1 结构形式
四旋翼无人机共有4个旋翼,它们对称地分布在机体的前、后、左、右4个方向。4个旋翼处在同一高度平面内,并且4个旋翼的翼长和结构都是相同的,4个电机对称地安装在四旋翼无人机的支架上,而支架的中心部分则用来安装四旋翼无人机的主控制器和外部设备。四旋翼无人机是一种拥有6个方向自由度的垂直升降设备,可以实现前、后、左、右、上、下6个方向的移动。由于它只有4个外部动力输入,却有6种输出状态,因此四旋翼是一种欠驱动系统。四旋翼飞行器的结构如图1所示。
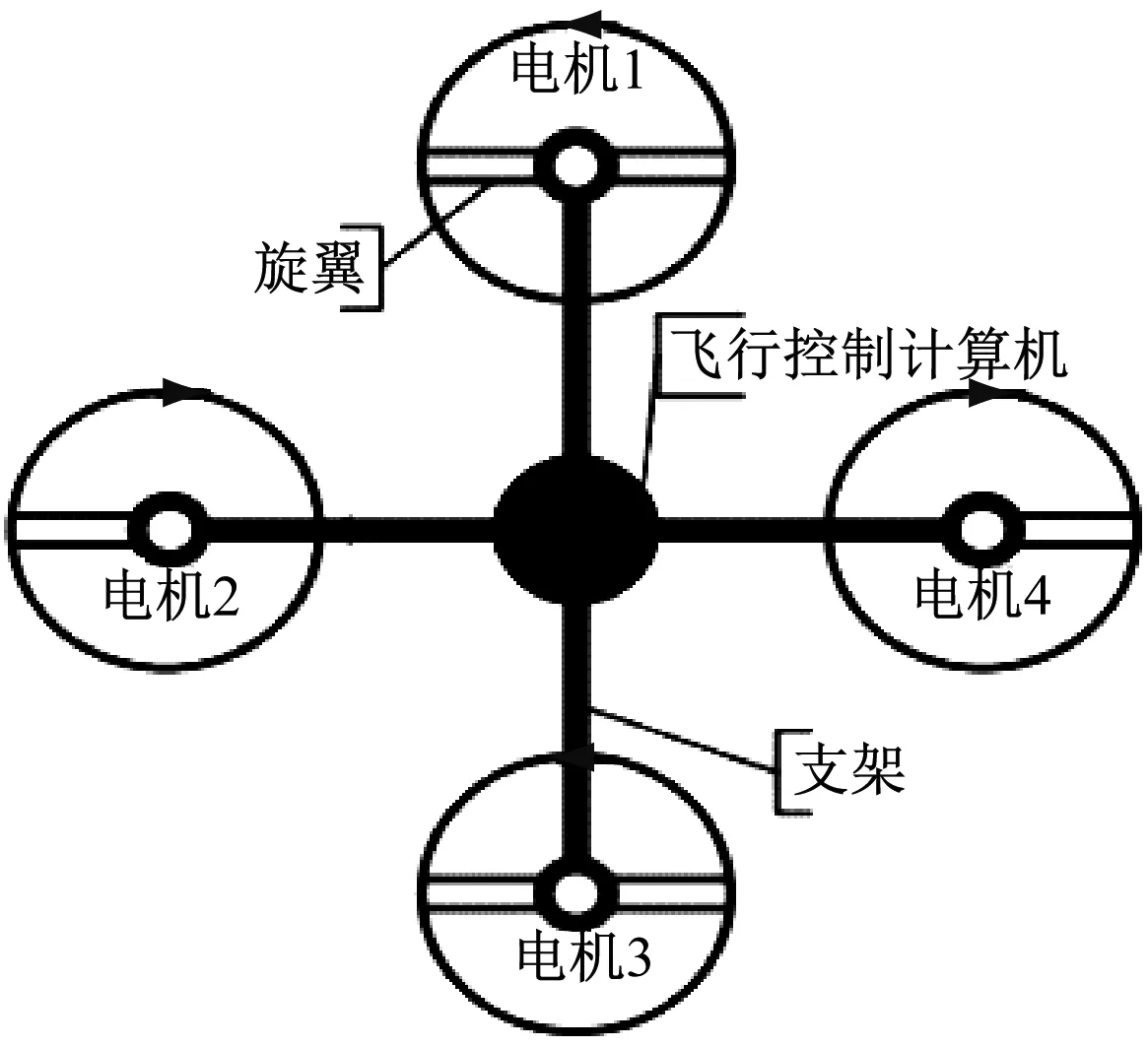
图1 四旋翼飞行器的结构图
1.2 工作原理
多旋翼姿态的调整是通过各旋翼所产生升力的合力来实现的。多个旋翼均布在飞行器的周围,其各桨叶按照顺时针或者逆时针方向旋转。若各旋翼产生的合力向上,其大小大于、等于或小于其自身的重力,则可由此来实现上升、悬空或下降;若其一侧的旋翼产生的升力大于另一侧,那么飞行器就会产生俯仰或者滚转运动;若其合力矩不为零,则会表现出自转的现象[2]。四旋翼无人机的运动方式如图2所示。
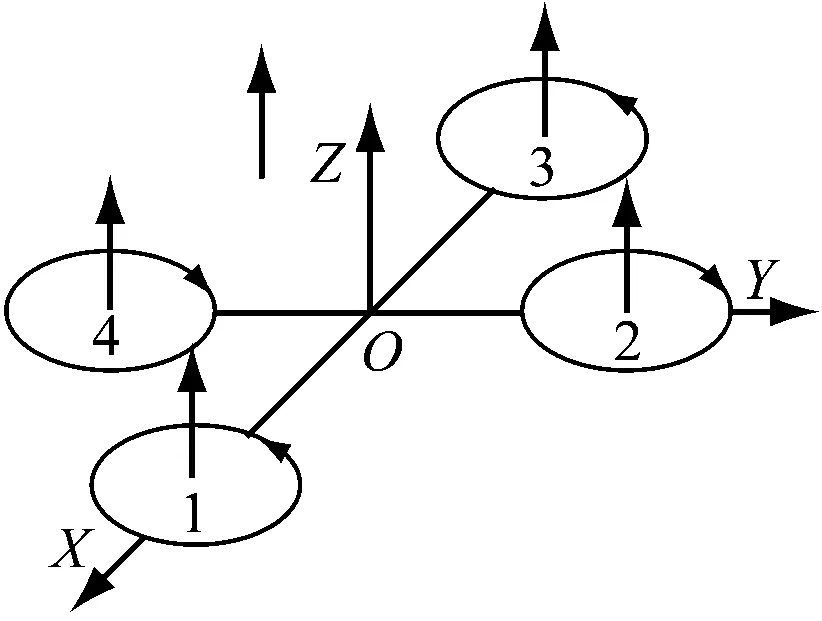
(a)垂直运动
2 系统硬件设计方案
本系统的总体设计方案由STM32微控制器最小系统、MPU9250九轴传感器信息采集模块、WiFi信息处理模块、电机驱动控制模块、电源模块组成。系统的硬件框图如图3所示。

图3 四旋翼无人机硬件系统总体框图
传感器MPU9250采集来自飞行器的传感器数据,该数据通过相应的算法解算出四旋翼无人机的姿态信息[3]。四旋翼无人机的飞行动力主要由4个电机的转动来提供。控制系统通过PID(比例-积分-微分控制)算法得到相应的控制量[4],改变相应电机转速控制四旋翼无人机实现不同飞行姿态调整。在飞行过程中能够捕获遥控信号,并转换成相应的数字信号,实现控制,同时能将采集到的数据通过无线通讯模块发送给接收设备。
2.1 STM32控制模块
系统中的数据采集、信号调理、数据处理及相关的控制全部由基于ST公司的微控制器STM32F407完成。该控制器使用了标准的ARM架构,内部具有强大的时钟系统,包含了UART、IIC、SPI及PWM等外设,完全满足设计需要,通用IO口还可以根据需要添加各种外设。
2.2 MPU9250数据采集模块
MPU9250是一款九轴传感器,内部集成有三轴陀螺仪,三轴加速度计和三轴磁力计。其将采集的信息转换为16位数字量输出,控制端可通过 IIC总线接口和MPU9250进行数据交互,其数据的传输速率可达 400 kHz/s。MPU9250还自带数字运动处理器硬件加速引擎,使用DMP(数字运动处理器)的MPL库(InvenSense 公司提供的运动处理库)可以非常方便的实现姿态解算[5]。MPU9250与STM32的接口设计电路如图4所示。
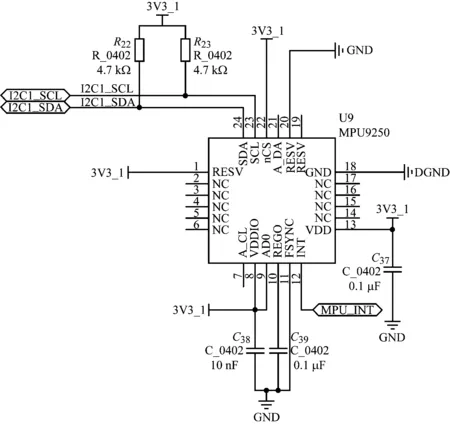
图4 MPU9250与STM32接口电路
2.3 电机驱动电路设计
设计中四旋翼的驱动采用了空心杯电机,该电机能量转换率高,启动制动响应快,具有可靠的运动稳定性,同时还具有重量轻,体积小,能耗低等特点,可最大限度地减轻飞行器的重量。电机驱动电路如图5所示。
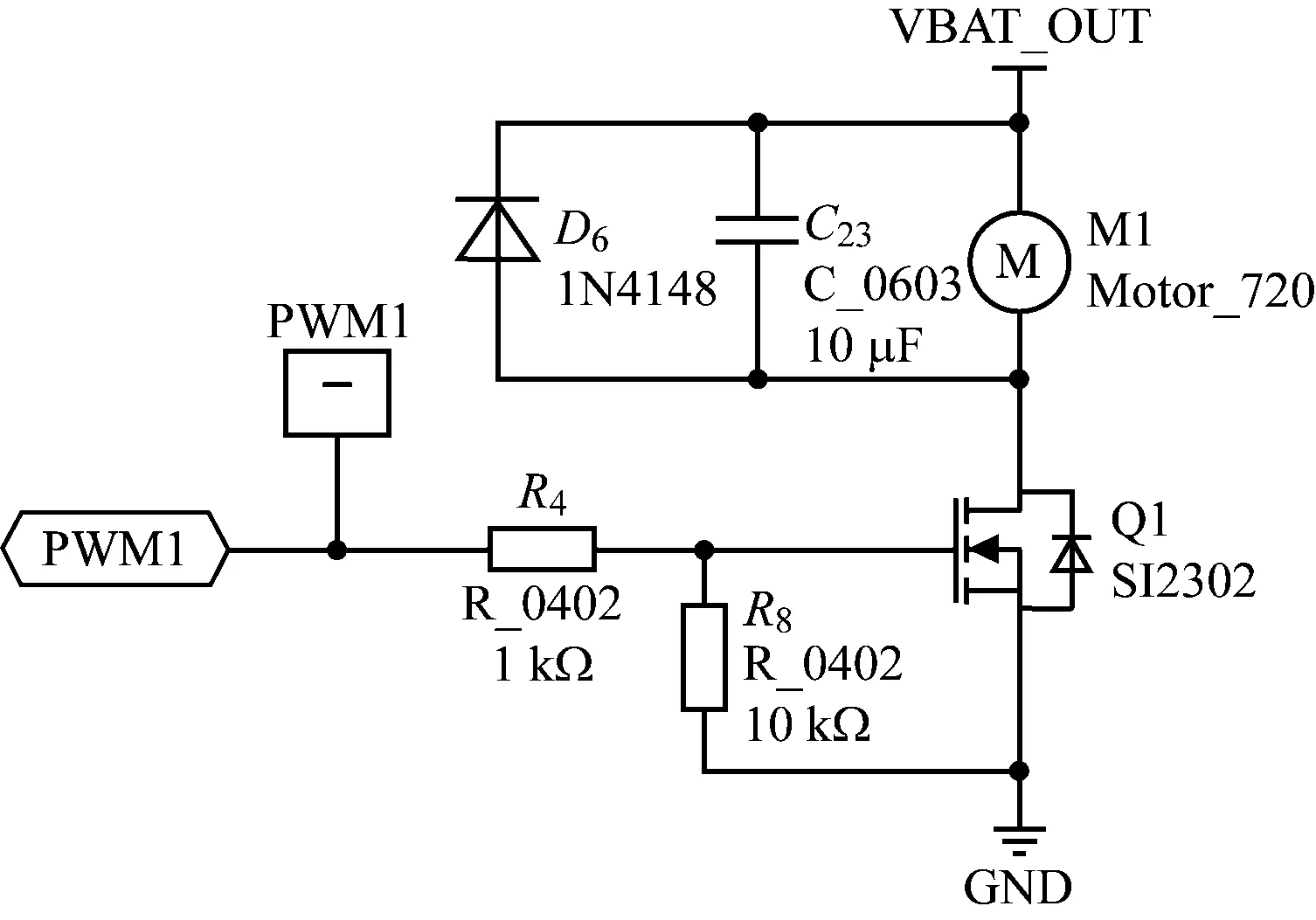
图5 电机驱动电路
3 系统的软件设计
四旋翼无人机通过地面控制部分控制其飞行,其中四旋翼无人机姿态信息、控制解算、姿态控制形成一个闭合的控制回路,保证了四旋翼无人机在受到外界干扰时,能够快速反应,进行自我调节,从而保证了飞行时的稳定。其控制方式如图6所示,其中通过传感器MPU9250采集四旋翼无人机的姿态信息。采用开源的Mahony互补滤波算法解算获取飞行器机体坐标系在地球坐标系中的姿态角,利用该姿态角与所需控制位置偏差给出调节参数,控制飞行器的姿态。
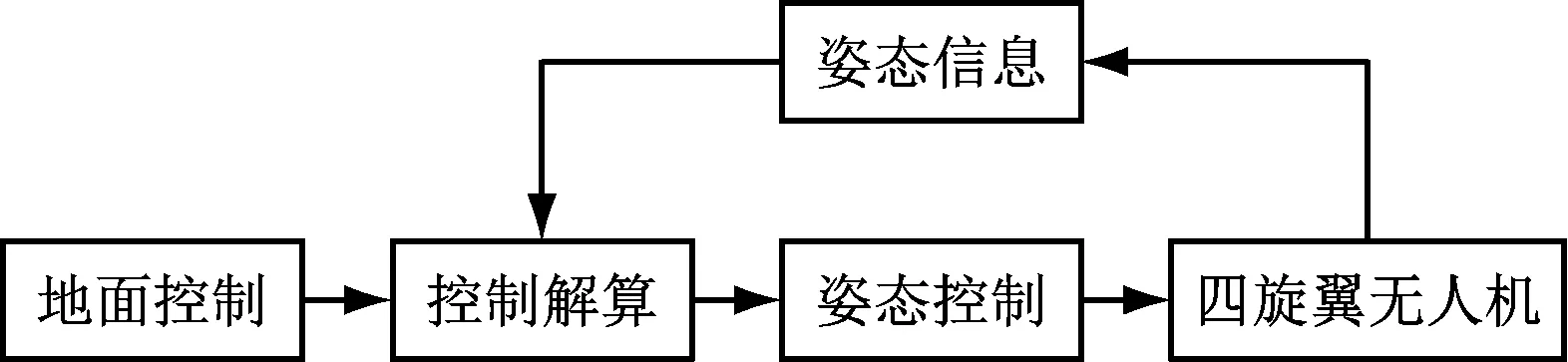
图6 四旋翼无人机控制方式示意图
3.1 MPU9250姿态信息采集
系统中四旋翼无人机的位置姿态信息由MPU9250九轴传感器采集,该信息为16位的AD值,通过IIC总线传送给控制器STM32,控制器将采集到的数据转换为实际的物理量并进行姿态解算,最终得到飞行器机体坐标系在地球坐标系中的姿态角。姿态传感器信息采集流程如图7所示。
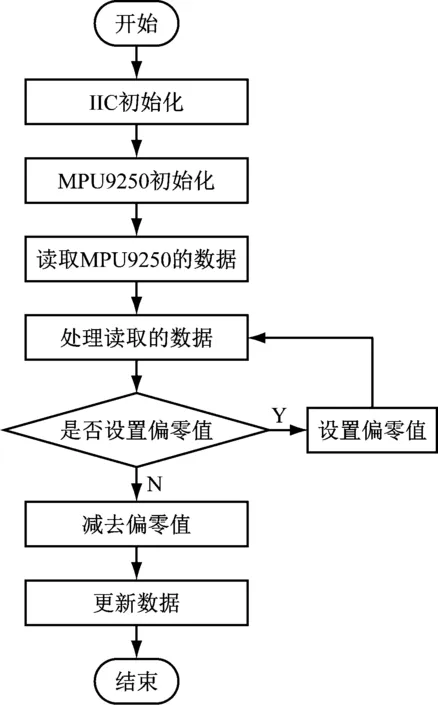
图7 MPU9250数据采集流程图
3.2 卡尔曼滤波
为了对传感器所采集的数据中的杂波进行处理,本设计方案中采用了卡尔曼滤波。设计中采用陀螺仪、温漂作为状态变量,以角速度、温漂作为输入量,建立过程方程,如式(1)。
(1)
其中,Qangle为陀螺仪测得的角度值,Qbias为温漂,ω为陀螺仪输出的角速度。同时以加速度计测得的角度与测量误差作为参数建立相应的观测方程如下:
(2)
先验估计:将式(1)代入x(k|k-1)=Ax(k-1|k-1)+Bu(k)得式(3),
Qangle=Qangle+(ω-Qbias)×dt
(3)
后验估计的计算式为式(4),
x(k|k)=x(k|k-1)+Kg(k)(z(k)-Hx(k|k-1))
(4)
在本设计方案中,卡尔曼滤波的最终目的是得到系统的最优状态量,同时实时对系统参数进行更新。
3.3 模糊PID控制电机算法
PID控制算法的实质就是根据输入的偏差值,通过比例函数、积分函数和微分函数进行综合运算,最后将运算的结果作为控制输出的一种控制方式。


图8 模糊 PID 控制器的结构图
控制系统通过PID算法[7]调整输出PWM波形,从而改变电机的转速,控制四旋翼无人机实现不同飞行姿态调整,控制方式如图9所示。
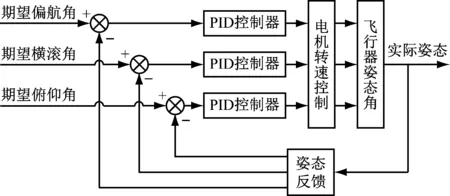
图9 四旋翼无人机PID控制
PID控制器相关参数设定值如表1所示。
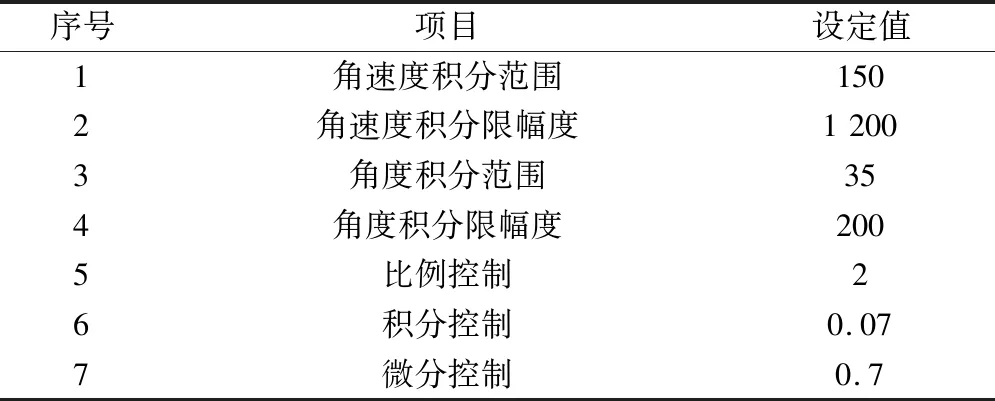
表1 PID控制器相关参数设定表
4 总结
本文研究了四轴飞行器的控制系统,包括硬件结构及软件设计,给出了MPU9250传感器的信息采集及数据处理,通过卡尔曼滤波算法对传感器所采集的数据进行融合滤波,从而实现精准的姿态测量,根据飞行姿态[8]结合PID控制算法,完成对四旋翼无人机飞行姿态的控制。通过实验测试,验证了此项目的可行性,同时为以后的飞行器的姿态调整提供了理论依据。
