一种应用于多飞行器跟踪拍摄的控制系统半实物仿真虚拟环境设计与实现
2022-02-21范文博
穆 乐,许 谦,亢 锐,骆 斐,范文博
(北京航天自动控制研究所,北京 100854)
0 引言
国内在先进飞行器发展的需求牵引下,对滚仰导引头控制技术开展了研究,王志伟等、朱明超等分别采用坐标转换和旋量理论研究了滚仰导引头跟踪目标时框架角增量计算方法,根据框架角和探测器误差角实现滚仰导引头控制闭环。由于红外成像制导飞行器的出现,红外图像识别跟踪技术迅速发展,荆文芳、姜锦峰对红外图像的检测、识别跟踪等技术进行了大量的研究。刘阳等对成像飞行器的目标识别和跟踪算法进行了研究,通过对比不同帧图像的特征,将图像中的目标提取并进行跟踪。李成等对红外成像制导飞行器的末端图像识别与跟踪进行了研究,选取了高亮区比例、灰度标准偏差、长宽比、紧凑度和复杂度等5个特征量作为目标识别的依据。付晓红对红外成像制导飞行器的抗干扰方法和干扰方法进行了研究,将飞行器的图像识别与跟踪过程分为4个阶段,分别研究每个阶段的干扰方法。
目前在跟踪目标所采用的方法大多是滚仰导引头控制技术和红外成像制导技术,由于导引头在目标识别过程中成本较高,调试复杂度高、试验周期长直接影响制导算法精度的性能评价。本文基于飞行器在头体分离后,一子级依靠独立控制系统,采用图像测量装置实现对飞行器的跟拍,使飞行器始终处于视场中心附近,在此应用背景下,设计实现了一种基于头体相对位置的图像测量等效装置的试验控制系统,应用于飞行器控制半实物仿真试验。基于头体相对位置的图像测量装置在原有图像测量装置硬件的基础上通过修改信息通道,去掉目标识别过程,增加相对位置输入通道,解决了以往图像测量装置识别过程试验验证成本偏大的问题。通过试验结果表明,图像测量装置实物等效器闭路制导仿真试验技术既逼近了实际应用环境,提高了试验的真实性和可靠性,又降低了试验成本。
1 基于头体相对位置的图像测量实物等效技术
图像测量装置实物等效器状态半实物仿真试验系统框架如图1所示,主要设备包含仿真计算机、综合控制计算机、综合控制器和图像装置实物等效器。在每个仿真周期,仿真机进行数学模型计算,并得到的惯组等效数据发送至综合控制计算机和综合控制器。综合控制计算机和综合控制器中的飞行控制软件利用惯组等效器进行导航、制导和姿控计算,解算伺服指令和发送机控制指令并通过1553总线发送至伺服机构。仿真软件接收伺服机构摆角,用于下一周期的模型计算,从而完成系统的闭环仿真。其中,仿真机把头体相对位置信息通过串口传输给图像测量装置实物等效器,图像测量装置则输出高低角和方位角信息,通过上述闭环跟踪控制,保证飞行器飞行处于图像装置视场中心附近。
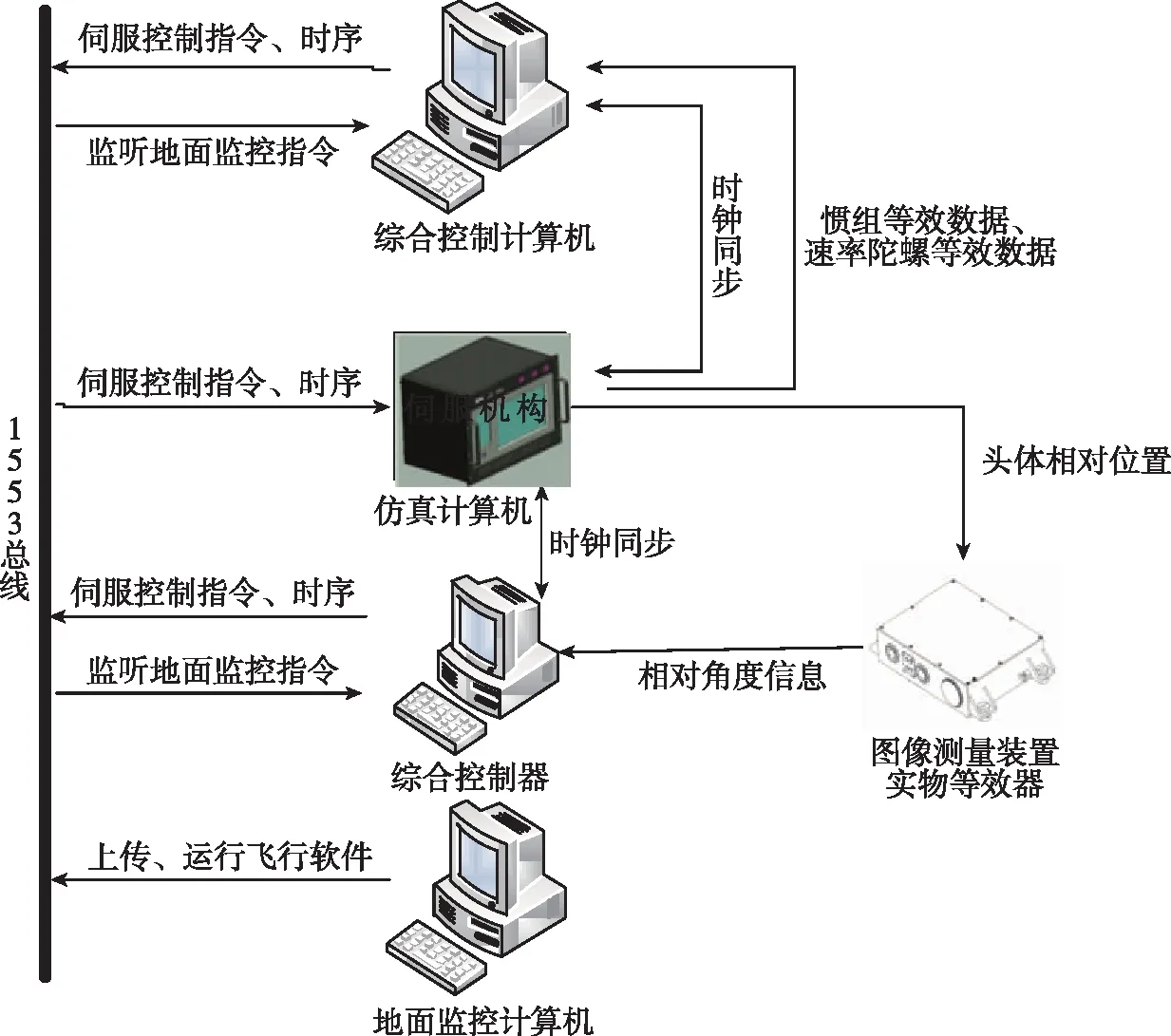
图1 图像测量装置实物等效器状态半实物仿真试验系统框架图Fig.1 Frame diagram of physical equivalent state hardware-in-the-loop test system of image measuring device
飞行器体坐标系:坐标原点为飞行器质心,轴位于纵向对称平面内,平行于地平面指向前方为正,轴位于纵向对称平面内,垂直于轴指向上方为正,轴由右手法则确定。图像测量装置本体坐标系-,其中轴与跟踪摄像头光轴平行指向镜头前方,轴与安装法线方向相同,,,轴符合右手坐标系规则。图像测量装置坐标系与飞行器体坐标系关系如图2所示。

图2 图像测量装置坐标系与飞行器体坐标系关系Fig.2 The relation between the coordinate system of image measuring device and the coordinate system of aircraft
2 基于多核多线程的多飞行体并行实时仿真技术
为了满足图像测量装置跟拍仿真试验需与飞行器仿真试验同时运行的需求,本文首次使用基于多核多线程的多飞行体并行仿真实时平台。多飞行体并行实时仿真平台采用自研的8槽CPCI单系统制导姿控性能指标测试平台,使用基于Windows 7+RTX2012的实时仿真系统,即在Windows中嵌入RTX实时操作系统的方式实现实时仿真。操作系统为Windows 7,实时环境选择IntervalZero公司的RTX2012实时扩展模块实现,并在Microsoft Visual Studio 2010环境下进行仿真软件开发。刘同栓等、周林雪等提出RTX是目前基于Windows平台的唯一纯软件的硬实时扩展子系统,在半实物仿真方面得到了广泛应用。Windows+RTX系统框架如图3所示。
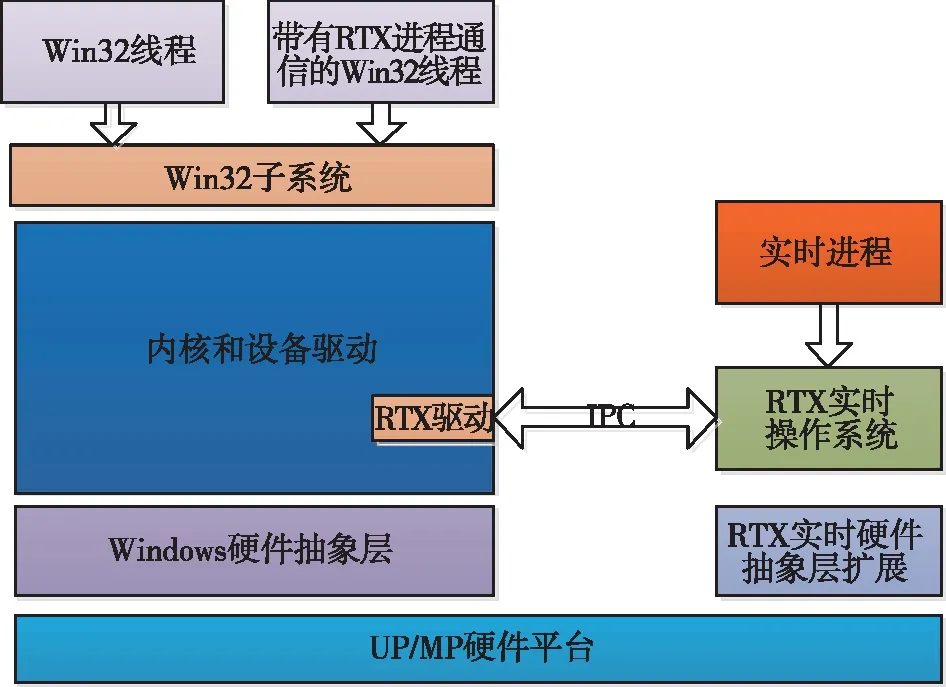
图3 Windows+RTX系统框架图Fig.3 System framework diagram of Windows+RTX
RTX具有良好的CPU亲和力,RTX2012该功能更为成熟。RTX可实现多核CPU的资源分配,使不同功能的程序、线程分别运行在不同核上,通过提高CPU利用率增强单一仿真机软件的能力。施惠丰等提出每个核心既可以作为一个独立的处理器单独运行,也可以在操作系统的统一调度下并行处理不同的进程或线程,保障一子级跟拍仿真试验需与全飞行器仿真试验同时进行。
基于多核CPU并行实时仿真软件架构如图3所示,仿真软件采用Windows 7+RTX 2012的上下层开发模式,在Microsoft Visual Studio 2010环境设计多线程并行仿真架构。上层软件为Win32非实时进程,主要用于人机交互、图像显示、数据读写等实时性要求不高的任务。下层软件利用RTX 2012分配多核CPU资源,采用专用模式将不同功能的线程设置到不同的CPU核上。通过多线程时钟设计,保证了并行仿真软件的实时性。其实现方法是以硬件板卡时钟为标准时钟,采用事件对象的方式建立多个线程的时钟循环体。以同一时钟源建立具有实时性的多线程仿真软件,作为开发多飞行体仿真软件的基础保障。
实现了多线程并行计算,解决了单核多线程需要根据时间片轮转调度的并发模式缺陷,实质性提高软件的任务执行能力,并且严格保证了多线程仿真系统的实时性。基于多核CPU并行实时仿真软件架构如图4所示。
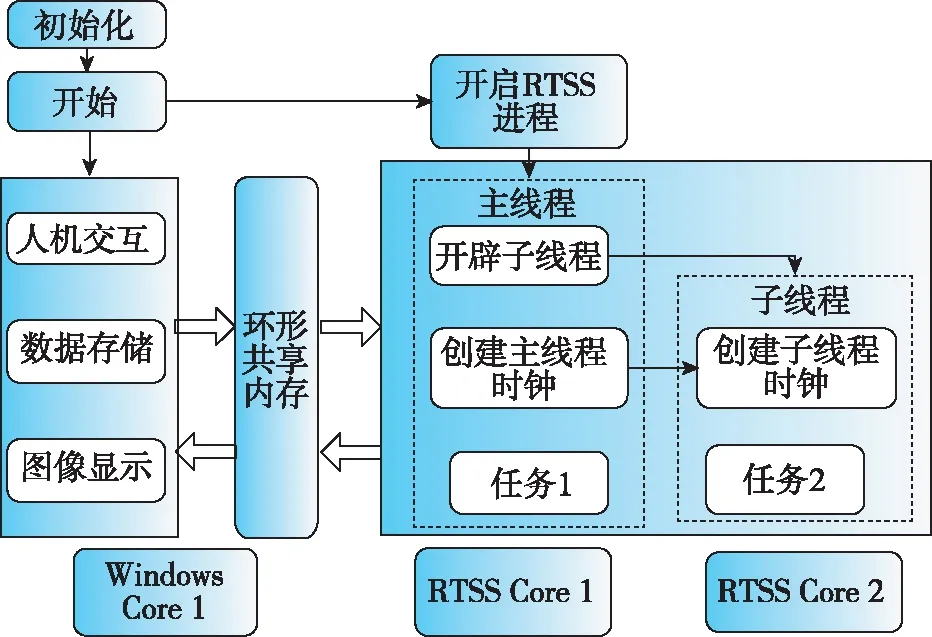
图4 基于多核CPU并行实时仿真软件架构图Fig.4 Software architecture diagram of parallel real-time simulation based on multi-core CPU
3 试验结果与分析
仿真试验系统研制完成后,以该飞行器为对象开展了基于RTX的全流程半实物实时仿真试验,检验从射前测试、发射控制到各段飞行直至飞行结束全发射流程中控制系统运行稳定性和软硬件的协调匹配性。
图5和图6为飞行器在头体分离后图像测量装置实物等效器和数学等效器的俯仰角和偏航角之间的偏差,可以看出数学等效器与实物等效器状态有差别,原因是实物等效器状态下给图测等效器输入的是飞行器相对于一子级的3个位置量,图测装置在接收到位置量考虑尾端面参考面积生成角度的过程中与数学状态偏差较大导致。但由于控制系统具有较强的鲁棒性,能够抑制干扰影响,将偏差基本控制在±0.005之间。
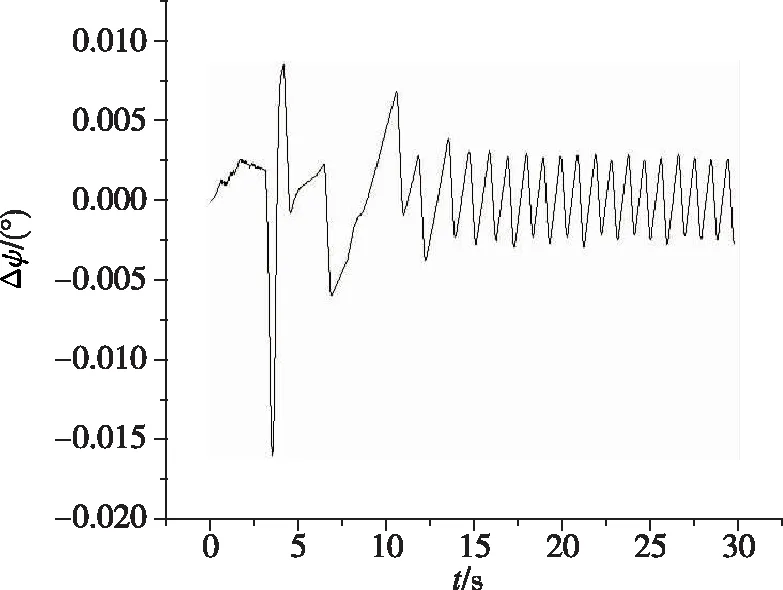
图5 偏航偏差Fig.5 Yaw error
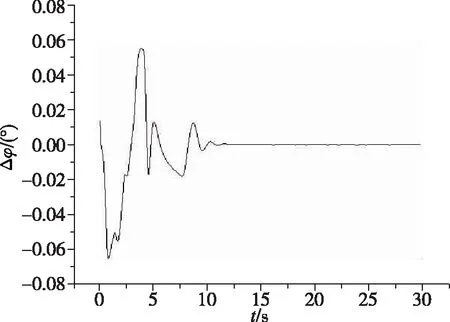
图6 俯仰偏差Fig.6 Pitch error
4 结论
针对多飞行器跟踪拍摄的控制系统仿真验证,原有图像测量装置及目标模拟器在目标识别过程中试验成本高、调试复杂程度高的问题,设计实现了一种基于头体相对位置的图像测量实物等效装置。新的图像测量装置采用头体相对位置信息,通过图像测量装置计算输出高低角和方位角信息,解决了导引头通过成像方式造成的试验成本大的问题。基于多核多线程的多飞行体并行实时仿真平台满足了一子级跟拍仿真试验与全飞行器仿真试验同时运行的需求。通过试验结果表明,图像测量装置实物等效、多核多线程的并行实时仿真等闭路制导仿真试验技术既逼近了实际应用环境,提高了试验的真实性和可靠性,又降低了试验成本。
