对自助图书馆的取还书机构结构的重新设计与优化
2022-02-19闫冰辉李玉晓周雄郭朝辉王训夏鹏
闫冰辉 李玉晓 周雄 郭朝辉 王训 夏鹏
(东北林业大学机电工程学院,黑龙江 哈尔滨 150000)
近年来,大数据、互联网、云计算等飞速发展,推动人工智能技术取得了巨大的进步,逐步从理论研究过渡到实际应用。语音识别、图像处理、大数据分析等人工智能技术都实现了技术突破,为后续在各个领域发挥作用提供了技术保障[1]。图书馆作为人获取知识的重要渠道,需要为人们提供各类信息、知识,因此需要收集规模庞大的各类书籍。而这些书籍的整理、归档需要花费大量的人力,读者想要查阅也要花费一定的时间,影响了借书效率甚至读者的阅读体验。传统图书馆的缺点是查阅不方便,在这背景下,基于人工智能技术的自助图书馆应运而生。本文运用到的技术便是近些年在各大图书馆自助服务改革中引入的RFID 技术。RFID 技术是Radio Frequency Identification 的英文缩写,即无线射频识别,是一种通信技术,又称电子标签,是一种通过无线射频信号实现自动识别而非接触式的技术[2]。RFID 技术的射频信号可自动识别和收集区域内的信息数据,实现无人工自动识别。目前,RFID 技术在图书馆领域的应用已经解决了图书馆的日常业务需求,包括图书自助借还、图书盘点、图书定位和安全防盗等[3]。但由于这一技术的应用尚未完全成熟,本文将对图书自助借还的优化展开。
1 图书的自助取还- 智能取还书机械手
以一自助图书馆服务机系统为例,该系统主要由客户服务操作终端,浏览书架,图书馆网络终端,图书信息浏览面部,辅助部件等组成。客户服务操作终端是自助图书馆服务机系统的核心部分,负责自助借还书功能的实现,其功能通过取书机械手的空间运动实现[4]。基于这一背景下,我们对其中的核心部分——如何自助借还书进行了取还书机构的优化设计,并根据它的功能将其命名为智能取还书机械手。
2 智能取还书机械手的结构
如图1 所示,支架1 一方面作为整个机构的支撑部分,另一方面又是机械手空间运动的竖直导轨,取还书部件通过在其上纵向运动来达到与图书相平的竖直高度。取还书部件同时又安装在由滚珠丝杆驱动的水平滑轨上,并通过在水平导轨上横向滑动来找到与书缝相齐的最佳工作位置。为方便描述,将负责取下书架上图书的机构称为取书机械手,而将负责把图书放回原书架上的机构称为还书机械手。支架的顶部安装有还书箱,负责盛装等待放回书架的图书,还书箱的箱体相对地面具有15°的倾斜度,工作时,书箱后部的电动推杆推动最下侧的图书,将书通过箱门推出,箱门外侧有一组压簧,通过压簧和弧形箱门保证图书垂直箱体底面被推进柔性输送带。在还书箱和还书机械手之间的竖直空间内有一条连接两机构的柔性输送带,负责将还书箱内的图书运送至还书机械手上。还书机械手的正下方有一取书箱,负责接住取出的图书。在取还书机械手上安装有RFID 读取模块和opencv 摄像头,用于识别图书和确定图书的位置,如图2。

图1 还书书箱侧视图
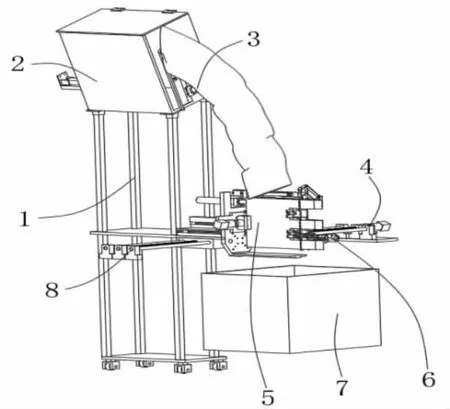
图2 取还书整体结构
2.1 取书机械手的运动
如图3,为了准确地取下图书,取书机械手的运动设计来源于人手取书时的动作的抽取与简化。取书机械手的上端有两组电动推杆,其中一组推杆驱动平行四连杆,连杆的最前端伸出与一块三角形橡胶拨片铰接。
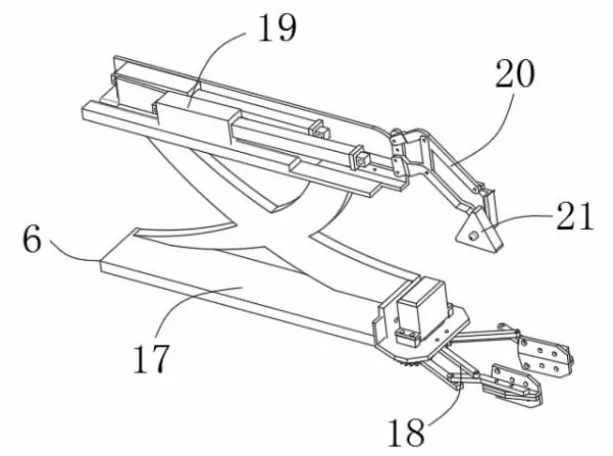
图3 取书机构
根据自由度计算公式:

其中,可活动构件n=3,平面低副PL=4,PH=0,可以计算出自平衡担架的自由度为1。此时由电推杆提供动力,可以使担架具有确定的运动轨迹。
拨片的下方是一只张开的小夹手。为了避免因取书机械手距离图书太远导致无法接触图书,取书机械手的另一根电动推杆被设计来推动由19 号推杆连接的连杆及拨片向靠近书架方向运动来接近图书。工作时,19 号推杆驱动连杆,使拨片给图书上部书角一个向下和向外的力,两个力的合力使图书以书脊绕底部书角向外旋转,使图书绕底部书角旋转向外运动。图书上部分露出书架,然后由小夹手夹持露出的书角将图书抽出,待取书机械手运动至取书箱的上方,小夹手松开,图书落入取书箱内。为了保证夹手可以夹住露出的书角,可通过减小小夹手与拨片的竖直距离,且经多次试验小夹手都能夹住露出的图书,取书机械手的工作步骤:初始状态:机械夹手闭合,一号气缸收缩,二号推杆收缩;
步骤一:机械夹手张开指定宽度。
步骤二:一号气缸前伸,拨手向前平移。
步骤三:二号推杆推出同时伴随着一号气缸收缩,拨手将书拨出一角——需要视觉识别书本的位置。
步骤四:机械抓手夹紧书的一角——视觉检测是否成功将书夹紧。
步骤五:整体机械结构向后平移,将书本拉出书架。
步骤六:机械抓手张开,释放书本落入下方书箱。
2.2 还书机械手的运动
如图4,还书机械手同样利用了人手还书时的动作。还书机械手前端为两块相同的撑书板,撑书板由正反牙双向丝杆驱动,负责夹住等待归还的图书。在两块撑书板之间中部有一电动推杆,负责推书。撑书板的正下方有一水平的承书板,负责接住柔性输送带里落下的图书。机械手的后端是一根电动推杆,推动机械手向靠近书架方向运动,以保证还书时机械手能伸入书架内。还书时,待归还的图书从还书箱内通过柔性输送带落入到两个撑书板之间的承书板上,通过电动推杆工作,推动撑书板插入目标书缝,接着正反牙双向丝杆旋转,内嵌的螺母带动撑书板沿丝杆轴向相背运动,从而带动两个撑书板展开,腾出放书空间,最后由两撑书板之间的电动推杆抵住书脊,将书推至目标书缝,然后机械手抽离书架实现自动还书。柔性输送带的作用是防止图书落入承书板上时歪斜,保证书可以笔直地落入承书板上,从而保证两撑书板间的推杆可以抵住书脊将书推进书架。还书机械手的工作步骤;初始状态:夹书板张开到最大的位置,三号四号气缸收缩,一号电动推杆收缩状态。
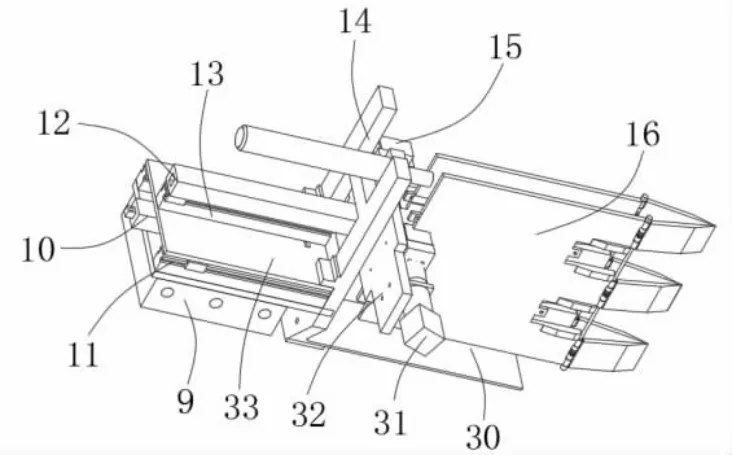
图4 还书机构
步骤一:电动推杆前伸到既定位置将书本从上方书箱中推出顺着柔性滑道落入夹书板中。
步骤二:步进电机旋转夹书板将书本夹紧——视觉检测书本的宽度产生停止信号。
步骤三:三号气缸前伸到既定位置将书本插入书缝中——视觉识别书缝的位置。
步骤四:四号气缸前伸气缸顶着书脊把书完全推入书架中识别到完全插入书中——视觉识别后发出停止给气信号。
步骤五:三号气缸收缩,四号气缸保持不动将机械手从书缝中拔出- 视觉需识别判断是否成功。
步骤六:四号气缸收缩,回复初始位置。
2.3 机械手压力检测机构
对于取书机械手,要使所有的图书都能被拨片拨出,在假定所有书的摩擦系数都近似相等的条件下,只需要满足能将图书馆中最高和最重的一本图书拨出即可。以一本大16K精装书为例,书高297mm,书宽210mm,书厚50mm,鉴于图书馆内大部分图书的质量都不到500g,我们取700g 作为书架上最难被取下那本书的质量,使其绕书脊转动,用拉力传感器连接在拨片和连杆之间,即可测得这个最大拉力值。而要满足夹手可以将露出的图书抽出,同样只需要满足能将最重的图书抽出即可。经仿真可得出拨片需要提供的最大力为35N,如图5。
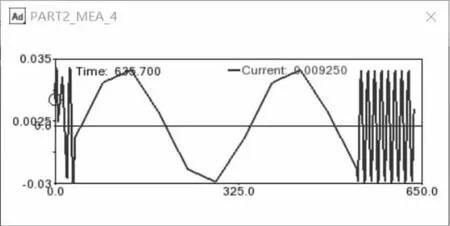
图5 取书机构工作时输出力仿真
对于还书机械手,撑书板伸入书缝后,需要向两侧张开将图书撑开,我们将一压力传感器放置在撑书板和与撑书板接触的图书之间,在撑书板中心处施加一个垂直于撑书板的力,随着这个力缓慢增大,当撑书板能推动图书运动时,记下压力传感器的示数,再将该示数乘以撑书板中心到正反牙双向丝杆的垂直距离,所得结果即为丝杆需提供给撑书板的动力。为保证丝杆提供的力能够驱动撑书板的运动,应尽量选择图书紧凑接触且图书宽度和厚度较大的图书来计算压力,并需要多次试验,取最大值,最后将测得的结果代入,实验观察撑书板能否推动图书。
对于撑书板之间的推杆,可在其上安装一压力传感器以判断是否将图书完全推入书架和避免推杆过度伸入导致图书纵向弯曲。
2.4 摩擦力的利用和克服
在取书机械手的拨片和小夹手处,可紧贴一层橡胶,因为橡胶与大多数图书的之间的静摩擦因数较大,能在较小力下拨动和夹紧图书。而还书机械手呈书板上表面要保证足够光滑,以减小推杆推图书时的阻力,如表1。

表1 橡胶表面的摩擦系数
3 滚珠丝杆传动
滚珠丝杆传动机构原理如图6 所示,丝杆整体由下端支撑块支撑受力,支撑块左右两侧分别有圆柱导轨,滚轮通过固定螺丝螺母实现导轨与滑块的联轴器链接,双旋丝杠从滑块中间穿过,一端固定在端部挡板轴承,一端与步进电机链接,由步进电机提供动力驭动。当步进电机正向驱动时,带动丝杠顺时针旋转,丝杠上的连接套则会受到向上运动的外力,将外力传递到滑块上,滑块再带动固定于其上的撑书板沿着导轨相向或相背运动。
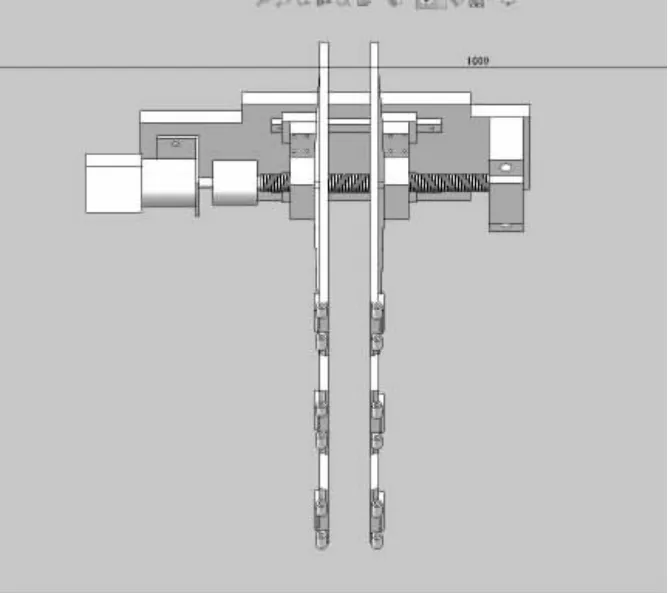
图6 滚珠丝杆结构图
4 视觉识别
在取还书时,需要知道图书待取出或放回的位置。为了获得这一位置,需要在机械手的前端放置Opencv 摄像头,以30hz 的频率拍摄图片,通过图像形态学处理对拍摄的图片进行处理,如图7-8,该方法可以将拍摄的图片进行图像腐蚀、灰度转化、反色、图像提取等处理,摄像头在一定频率下拍摄的图片不能直接被计算器处理,转化成坐标,而是要先进行图像处理突出书本与书本之间的间隙,如图9 所示,原照片有每本图书的书名信息等等干扰信息,而计算机需要的是图书的轮廓位置,所以要去掉这些干扰信息,通过图像形态学处理将图书灰度处理,排除颜色干扰;接下来进行反色、二值化等运算指令,进行开运算或闭运算,将书的缝隙区域转化成白色,突出显示,书背全部用黑色覆盖,去除书背的文字干扰;接着单取竖向的目标进行显示,并将其转化为空间坐标,如图10。

图7 书照片原图

图8 图书原照片

图9 灰度转化后的照片

图10 算法处理后图书照片的对比
结合RFID 技术,获得目标图书的位置,支架运动到该位置前方,丝杆上升到相应高度,然后由摄像头通过拍摄书架照片片并将图片处理后将图书的精确位置发给程序控制中心,最后由控制中心驱动机械手调整位置,完成取还书工作。
5 单片机控制
核心控制单元是采用宏晶科技公司制造的STC15 系列的STC15w4K58S4 芯片,该芯片不需要外部晶振和外部复位电路,内部时钟在5MHz~30MHz 可设,可工作的宽电压为2.5~5.5V。其具有超强的抗干扰能力、运行速度快、低功耗、成本低等优点。且该单片还内置了稳压模块,使得在小卫士在电源供给的稳定性有了极大的保障。
单片机的应用不仅仅能够获取数据,同时还能够对数据进行一定的处理以此来将数据进行应用。可提高CPU 的数据处理能力、控制能力。以单片机为主题,使用微电子技术,具备高运算速度,大部分的运算过程都会被大大缩短,从而缩短处理图书位置的时间[5]。
6 电力控制及电源模块
电力控制系统由电源模块,MCU 模块、红外接收模块和驱动模块这四部分组成。机械手装备有多块聚合物锂电池,整个系统以可充电锂电池电作为供电系统。
7 驱动模块
驱动模块采用L293D 电机驱动拓展板。L293D 是一块双H 桥驱动芯片,可同时驱动2 路直流电机,并可实现电机的正转与反转,实现此功能只需改变输入端的逻辑电平。该芯片在4.5V 至36V 的电压下提供高达600m A 的双向驱动电流,峰值输出电流每通道可达到1.2A,其内部还自带着ESD保护。且该模块:性价比高,易于控制,且无需保护电路和二极管也无需散热片。
