水下浮游探测器系统设计与实现*
2022-02-19国核电站运行服务技术公司沈杰赵琛王一帆李思颖
国核电站运行服务技术公司 沈杰 赵琛 王一帆 李思颖
AP1000三代核电站的余热排出热交换器水箱需进行周期性的目视检查,由于环境复杂且具有辐射性,必须通过水下探测设备进行远程检查。本文设计了一种能够自由定深、运行平稳,携带摄像系统,监视、监测和记录余热排出热交换器水箱目视检查全过程的水下浮游探测器系统,通过对设计方案的具体阐述,模块化方式处理各个控制部件,开发出了相应的控制软件。现场测试表明,该系统性能稳定,实用性强,达到了设计要求,具有一定的应用前景。
随着自动控制技术和核电技术的迅速发展,水下机器人技术被广泛应用于核工业应用领域,特别是在有放射性的核环境下,通过工作人员远程控制水下机器人完成相应的无损检测的任务,从而有效减少现场作业人员的辐射伤害和减轻工作负担,且能提高无损检测效率和准确性[1-4]。
根据AP1000三代核电站自主检查大纲要求,需要在运行周期内对余热排出热交换器等非能动安全系统重要部件进行水箱内周向三侧全面目视检查[5-6]。该水箱为封闭式水箱,只有一个通道可以进入,水箱总体高度约为10m,停堆检查时水位高度约为5m,人员无法进入水箱内检查,且无法用长柄工具实现检查[7]。为有效完成余热排出热交换器水箱目视检查,需开发一套水下浮游探测器系统。
1 控制系统设计要求
为有效完成余热排出热交换器水箱目视检查,在市面上现有水下富有探测系统基础上总结经验,分析原有设计缺陷,对现有水下浮游探测器系统进行改进。本文所提出的水下浮游探测器能够自由定深、运行平稳,携带摄像系统,监视、监测和记录余热排出热交换器水箱目视检查全过程,自带照明系统,满足本身摄像及作业所需要的光照强度,并能执行异物拾取等任务。
水下浮游探测器系统的设计要求以下几项:(1)保持推进器螺旋桨推进力持续运行;(2)改变视频清晰度低,亮度低,可视距离较短的缺陷;(3)高集成度控制系统,体积小,重量轻,便于使用和运输;(4)具备数据存储系统,并具有外联接口;(5)良好定深性能,悬停性能优化。
2 水下浮游探测器系统总体方案
2.1 总体组成
完整的浮游器总体包括浮游式潜水器本体、水面支持设备(控制箱、便携式控制盒等)和脐带绞车及脐带电缆,浮游器系统总体组成图如图1所示。

图1 浮游式潜水器总体组成Fig.1 Overall composition of floating submersible
其中,浮游器本体是水下运动设备和传感器的搭载平台。水面支持设备包括控制箱和便携式控制器,浮游器本体与水面控制箱通过脐带电缆连接。控制箱提供浮游器本体动力和控制指令;便携式控制器提供移动式操作,方便操作人员就地观察并操作浮游器。控制箱及便携式控制器均带监视器,浮游器本体从水下获得的视频图像和各种参数在监视器上叠加显示。脐带绞车的滚筒固定在绞车底盘后部,绞车底盘前部安放浮游器。脐带电缆可通过手动转动滚筒收放脐带缆,滚筒不含滑环,因此吊放时应先将需要的脐带缆放出,再将甲板脐带缆上两端接插件插接在控制箱盒脐带绞车上的插座上,然后可以上电和布放[8]。回收时同样先将浮游器吊出水面回收,然后断电,将甲板脐带缆两端与控制箱盒脐带绞车分离,然后再将脐带缆盘在滚筒上。
2.2 技术指标和参数
控制系统应达到的技术指标和参数如下:
(1)控制箱。
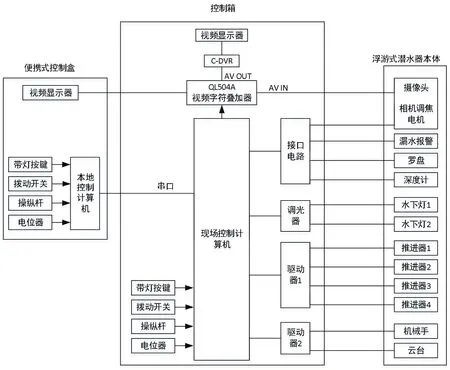
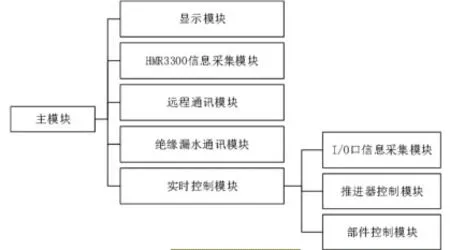
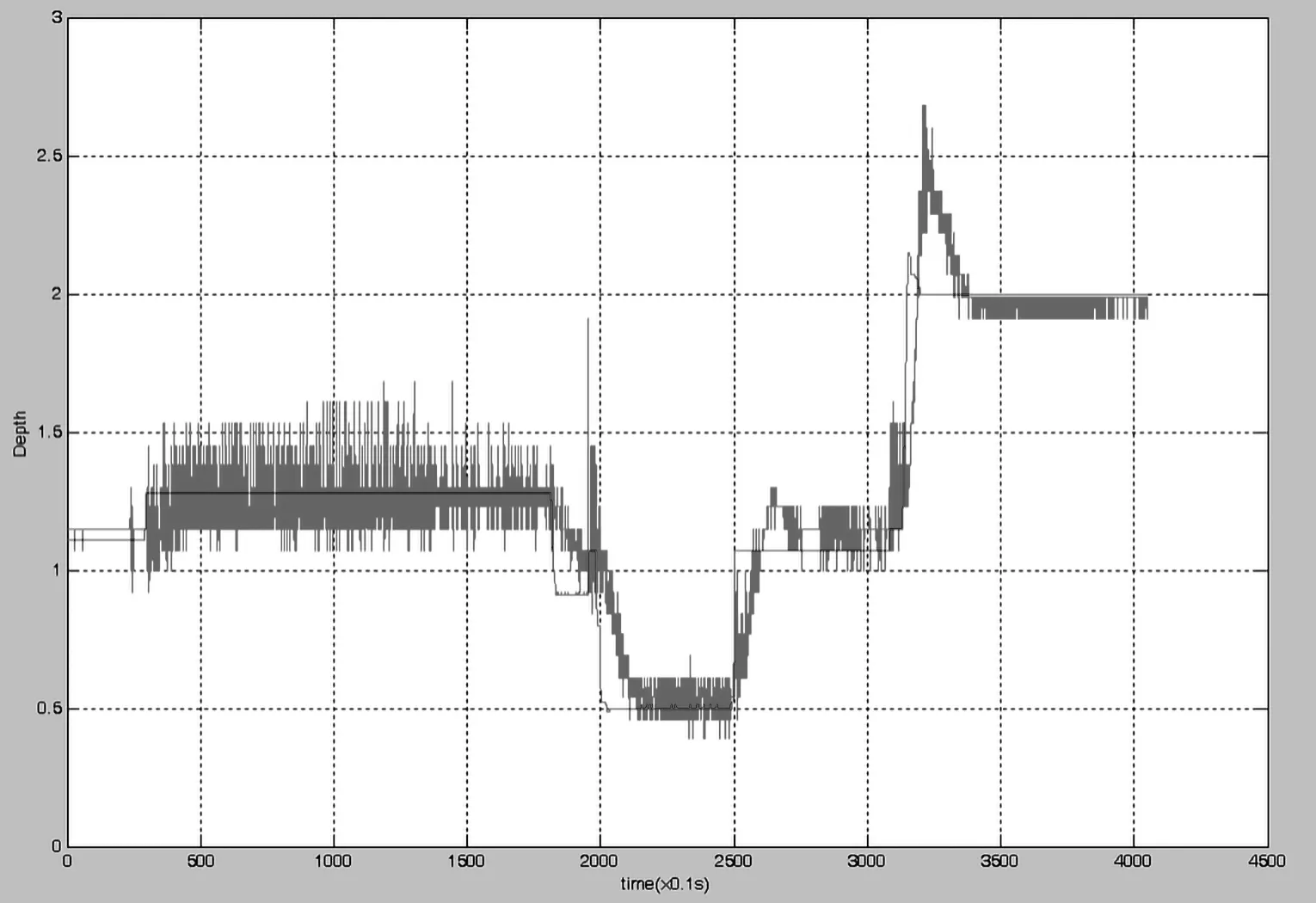
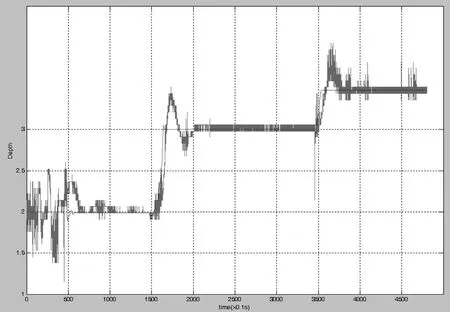
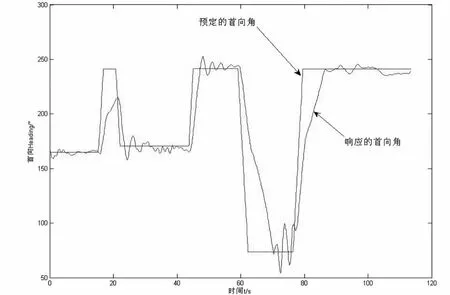
外形尺寸: 重量:<25KG; 结构:箱式,带拉杆; (2)便携式控制盒。 外形尺寸: 重量:<5KG; 结构:箱式; (3)绞车。 外形尺寸: 重量(含脐带电缆):<25Kg; 结构:带滚轮,便于移动; (4)最大进退速度:12m/min; (5)摄像:水平分辨率(彩色/黑白):480/570线; (6)推进力:前进方向推力≥1.5KG;垂直方向推力:≥1.5KG; (7)云台俯仰角度:-90°~+90°; (8)脐带缆:50m; (9)系统便与清洗、去污,外部结构尽量平滑;水下照明和摄像头有保护装置,避免与容器的碰撞,避免灯罩玻璃碎片的脱落; (10)便于安装、起吊,即投放和回收,包括故障等紧急情况下的起吊和回收; (11)水下使用电压≤36V。 浮游器本体即系统所有水下执行机构,为了保证可靠性,采用水面采集、控制和驱动的控制方式,驱动方式均为一对一[9-10]。浮游器本体上包括的执行机构有个推进器、直流伺服电机、机械手关节电机、直流防爆电机、云台电机、直流电机、和摄像机调焦电机。其中,浮游器本体上包括的传感器有HMR3000罗盘与姿态传感器、深度传感器、漏水检测探针,对于主要的水下传感器,也将其信号直接回传后再进行采样。 对浮游器本体,控制系统提供3种控制模式:手动、自动(正常模式)、应急。手动和自动控制模式下,操作人员通过控制处理器进行浮游器控制,在应急状态下,允许切断控制处理器,由操作人员直接控制水下电机。 水面支持设备包括控制箱、便携式控制器和脐带绞车。其中便携式控制器可以与控制箱分离,在10m范围内活动。 控制箱是浮游器控制中心,所有的输入、输出、计算、控制及驱动都是控制箱发出的。具有功能如下:电源输入、脐带电缆输出、水面摄像机输入、自动/手动控制模式切换、推进器应急控制、运动自动控制、用于水下数据显示的视频显示器和综合显控系统,其中综合显控系统包括电源、主控计算机和控制电路、视频字符叠加器,实现的功能包括:(1)浮游器操纵控制指令生成和下行发送;(2)自动控制规律的计算:基于PID的自动定向、定深功能,以及推力分配功能;(3)浮游器视频数据合成与显示。来自水下摄像机的视频被送往显示器显示,通过视频字符叠加,在显示器上同时显示浮游器状态信息如深度、首向、纵横倾、操纵状态、时间、客户字符等。 便携式控制器是为方便操作人员在水池旁观察操作使用,具有体积小,重量轻和操作方便等特点,具有信号指示灯、云台俯仰控制、机械手伸缩控制、机械手卡抓控制、光强度控制、运动手动控制、垂直控制旋钮和运动自动控制等功能。 水下浮游式遥控探测器的电控系统用于实现整个系统的能量分配、设备控制、航行控制和状态监测功能。水下浮游探测器控制系统主要包块三部分:便携式控制盒、控制箱和浮游式潜水器本体,原理图如图2所示。控便携式控制器、漏水与绝缘在线检测及推进器驱动器与控制箱都是通过串口相连接的,制箱内主控计算机模块是多串口计算机,主控计算机有丰富接口,传感器及操作信息直接与其相连,省去了很多外围电路,简洁了电路,减小了系统体积,使得控制箱小型化成为可能。现场控制计算机和本地控制计算机具有同样的操作功能,通过本地控制计算机对现场控制计算机进行通讯实现远程控制,如带灯按键、拨动开关、操纵杆、电位器等控制操作。现场控制计算机通过接口电路可实现视频监控相机调焦电机的运行、漏水报警、罗盘和深度计的反馈,通过调光器实现双水下灯供电和控制,通过驱动器实现4个推进器、机械手和云台的操纵。 图2 控制原理Fig.2 Control principle 电控系统由基本航行控制系统、应急航行控制系统、手臂手爪控制系统、视频监控系统、照明控制系统、云台控制系统、漏水与绝缘检测系统、电源系统等8个系统组成。考虑到辐照环境下的可靠性,水下系统非常简单,主要的功能都被集中到水面实现,因为基本航行控制系统和应急航行控制系统与电控系统的核心内容。 基本航行控制系统包括450智能控制板、推进器驱动器及对应4台推进器、传感器信号采集模块、控制面板信号采集模块。这些模块通过RS485总线组成局部网络,共同实现浮游器的运动控制,与基本航行控制系统对应的控制面板控件为:自动控制控件、手动控制控件。 除了基本航行控制系统以外,浮游器还配置了1套应急航行控制系统,用于4路独立双刀常开触点继电器控制,实现常规/应急切换隔离与非智能I/0控制。 为了使控制软件中的各模块相互协调稳定的工作,让系统智能控制板的时序资源得到充分的使用,必须对软件结构与时序进行考虑和良好的设计。 主控器的软件结构如图3所示。与硬件电路模块相对应,系统软件的模块划分为: 图3 主控制器软件结构图Fig.3 Software structure diagram of main controller (1)主模块:软件入口和综合管理。 (2)显示模块:参数视频显示管理。 (3)姿态传感器信息处理模块:HMR3300信息采集与预处理。 (4)远程通讯模块:远程便携控制单元与本地控制单元的数据通讯。 (5)绝缘漏水通讯模块:绝缘漏水板与本地之间的数据通讯。 (6)I/O口信息采集模块:控制面板和传感器信息采集与预处理。 (7)定时器模块:实时时序控制。 (8)推进器控制模块:推力控制指令生成。 (9)部件控制模块:机械手臂、手爪、云台、摄像头等部件的控制指令生成。 在实时控制模块中,定义了三个时钟,时钟1(系统时钟,0.1ms):通过调用I/O信息采集模块实现控制面板数据的采集及传感器信号的预处理任务,通过调用部件控制模块,生成各部件的控制指令;时钟2(50ms):通过调用推进控制模块,完成推力指令生成任务;时钟3(200ms):调用显示模块,通过串口USART2,在发送中断中发送视频叠加信息,通过串口USART3,在发送中断中,发送呼叫数据至绝缘漏水板。姿态传感器模块是使用ARM控制器中的接收中断,当串口USART1有接收到由电磁罗盘发送过来的当前的水下机器人姿态信息时,便发生中断,处理接收数据。远程通讯模块是使用ARM控制器中的中断,当串口USART6接收到远程控制单元发送的控制数据时,在接收中断中处理接收数据;收到远程控制单元的呼叫后,在发送中断中发送绝缘漏水数据至远程控制单元。绝缘漏水通讯模块使用ARM控制器的中断,通过串口USART3,在发送中断中,发送呼叫数据至绝缘漏水板;在接收中断中处理收到的绝缘漏水数据。I/O口信息采集模块,通过使用ARM芯片的DI及AI,完成各数字量及模拟量的采集及预处理。 为验证水下浮游探测器的主要功能和稳定性,本文对浮游探测器的自动定深功能与定向性能进行了测试。 水下浮游探测器系统深度的测量误差为±0.1m,测试时通过给定一任意目标深度,根据软件界面显示数据,来观察定深效果,再改变水下浮游探测器目标深度值,保存水下浮游探测器的目标深度和实际深度数据,画出定深曲线如图4和图5所示: 图4 定深图1Fig.4 Depth determination drawing 1 图5 定深图2Fig.5 Depth determination drawing 2 观察结果如下:目标深度1.1m、显示深度1.15m、深度显示数据变动范围为1.00~1.23m。由上面两个图可以看出,水下浮游探测器具有良好的定深特性。 自动定向功能测试是通过改变水下浮游探测器目标首向角,保存水下浮游探测器的目标首向和实际首向数据,画出定向曲线进行,定向曲线如图6所示。 图6 定向曲线Fig.6 Orientation curve 根据实测效果可知,水下浮游探测器具有较好的动态首向稳定性,而静态首向稳定性仍需改善。 本文在现有水下浮游探测系统的基础上,总结经验,分析原有设计缺陷,对现有水下浮游探测器系统进行改进,通过研究与开发,最终形成一套水下浮游探测器系统,该系统能够自由定深、运行平稳,携带摄像系统,监视、监测和记录余热排出热交换器水箱目视检查全过程,自带照明,满足本身摄像及作业所需要的光照强度,并能执行异物拾取等任务,能够满足余热排出热交换器水箱目视检查的要求。水下浮游探测器系统的研制与开发,是核辐射环境下水下监控机器人开发的一次有效尝试,可以胜任多种作业任务,如核电站堆内构件检查、核电站堆内构件维修与更换的监控、核电站主管道内部目视检查、核电站换料水池及乏燃料水池的目视检查及异物拾取等,同时该系统还可以应用于其他非核领域相关设备的水下目视检查及水下异物拾取,其应用前景非常广泛。3 系统硬件设计
3.1 浮游器本体设计
3.2 水面支持设备设计
4 浮游探测器控制系统
4.1 控制原理及电控系统组成
4.2 基本航行控制系统
4.3 应急航行控制系统
5 系统软件设计
6 现场测试
6.1 自动定深功能测试
6.2 自动定向功能测试
7 结语
