车牌自动识别系统的设计与实现
2022-02-19兰州职业技术学院梁宏炜
兰州职业技术学院 梁宏炜
随着人工智能技术的迅猛发展,文字识别、图像识别技术都得到了快速的发展,这也为开发车牌自动识别提供了技术支持。本系统运用先进的图像处理、模式识别和人工智能技术,能够即时精准地快速识别出车牌中包含的所有的汉字、数字和字母,并直接提供识别结果,从而使得对于机动车辆的自动化监控和管理成为了现实。本系统采用Visual C#作为开发平台,结合开源、跨平台的计算机视觉库OpenCV搭建了交叉编译环境,采用模块化的设计理念,利用模块化的编程方法对各个基本功能模块进行设计与开发,得到了一套可视化的车牌自动识别系统软件。该软件系统密切贴合生活,可以克服多种环境干扰因素,快速高效地完成各种车牌的自动识别。
车牌自动识别系统是计算机视觉、图像处理和模式识别的研究热点,是中国智慧交通的重要组成部分。可以进行交通流量检测,车辆定位,高速公路收费和汽车防盗的自动化监管。对于保障城市治安和道路交通安全,防止交通拥堵,实现智慧交通具有现实的积极意义。尤其是在疫情防控期间,更要求对一些特殊停车场所、大院及政府机关、居民小区进行严密的车辆管理,对机动车外出时段实施严密监控,对各类车辆进行零接触的登记和识别,提高安全管理水平及管理效率。
1 系统设计原理
车牌自动识别通过视频采集接口,抓拍在道路上行驶的汽车图片以实现车牌号码的车辨识,然后对动态采集到的图片经过预处理技术以克服图像干扰,从而提高了辨识效率。接着对于预处理过的图像进行边缘检测,并划分出每个字符的矩形区,再对它进行二值化处理,最后将规整好的文字块送入汽车字符识别系统以完成辨识工作。识别过程采用Sobel微分子算法对号牌部分进行初始数据处理,然后通过甄别号牌图块,将包含号牌信息的图块的特征信息添加到训练好的SVM识别模型器中,从而可以确定真正的车牌号码;文字分割与识别部分主要采用人工神经网络中的模型(ANN)取轮廓求外界矩形的方法达到提取文字图块的目的,再对于获得的文字图块采用ANN训练模型来确定牌号[1]。它的基本过程是:车辆图片收集—图片预处理—车牌定位—号牌切割—文字识别—输出识别结果。流程如图1所示:
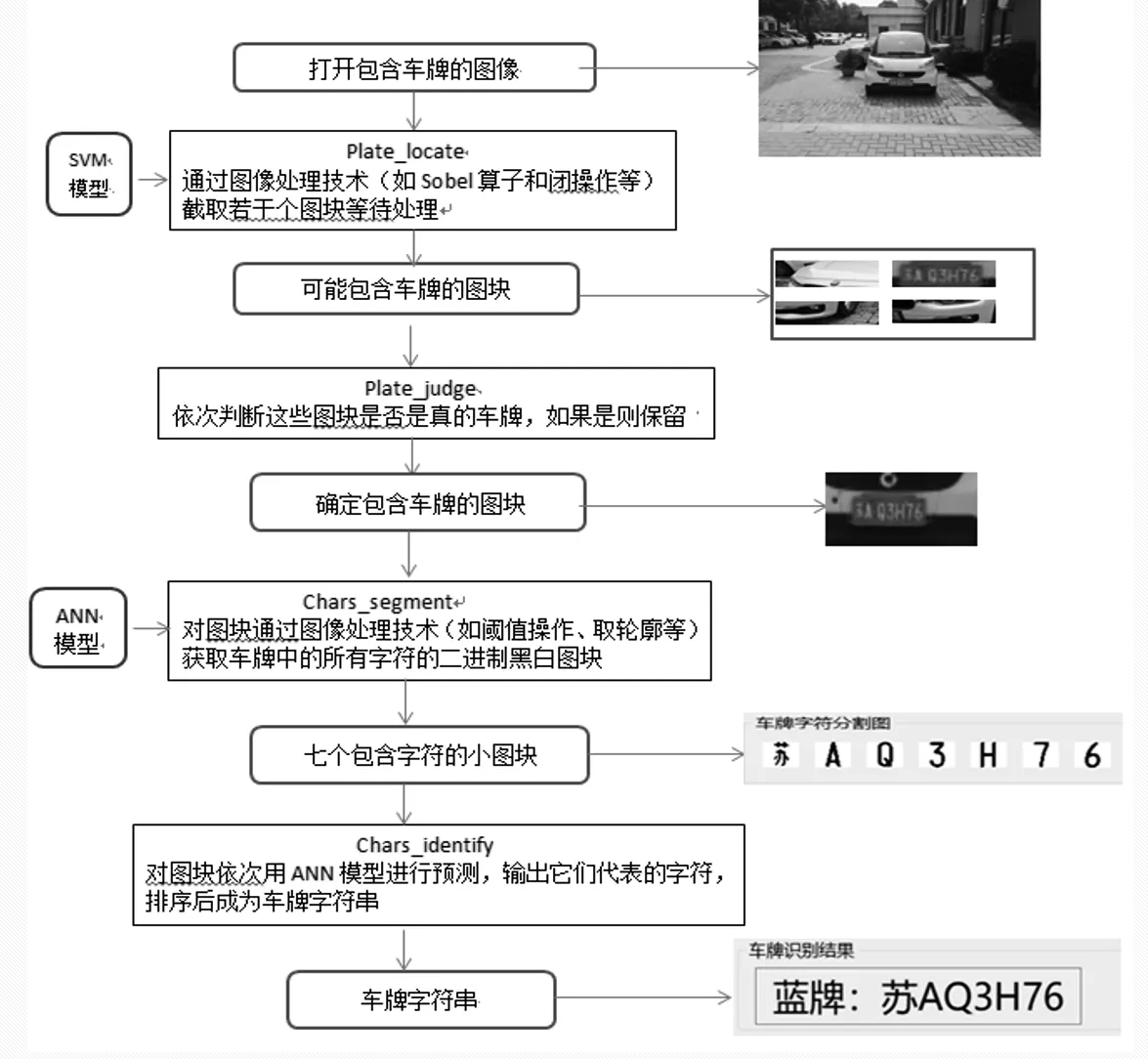
图1 系统流程图Fig.1 System flow chart
2 图像识别的算法设计
通常一个车辆图像所承载的信息很多,虽然有些信息能区分出不同的车辆比如车牌信息,但有些信息却代表了不同车辆的共同特性比如车体颜色和环境特征。所以我们必须在进行车牌的识别之前就要做出适当的特征提取,也就是需要从车辆图片中去掉无用的信息,只保留车牌模块这个有用的信息。这就要求我们要计算号牌部分的两种简单的字符特征:梯度分布特征和灰度统计特征。
2.1 梯度分布特征
该特征用来表示图像在水平位置和竖直位置上的梯度图像,可以通过把梯度图像分成各个不同的区块,实现对梯度图像中每个区域亮度差值的运算,下面是具体的运算步骤:
(1)首先把字符由RGB模式转化为灰度,再把像素大小归一化到16×8。
(2)重新定义传统的Soble水平检测算子:
x_mask=[-1,0,1;-2,0,2;-1,0,1]x_mask= [-1,0,1;-2,0,2;-1,0,1]和竖直方向梯度检测算子y_mask=x_maskTy_mask=x_maskT。
(3)对原图片依次使用mask_xmask_x和mask_ymask_y进行图像过滤处理,就可以得出SobelXSobelX和SobelYSobelY。
(4)对滤波后得到的图像,先统计算图像总的像素和是多少,然后再把它划分成4×2。的网络,就可以得到各个网格内的图像值的总和[2]。
(5)统计出每个网络内总灰度值占全部图像的比率,并把它们一起写入一个特征向量中,再把两个方向上分别得到的向量合并到一起就得到了最终需要的特征向量。
2.2 灰度统计特征
要图像先归一化为指定的尺寸,然后读取像素中每个点的灰度值作为特征向量即可。
(1)将图片由RGB模式转变为灰度值图片;
(2)将图像归一化尺寸为8×48×4,并将图像扩展成一行以便形成特征向量。字符识别过程如图2所示:
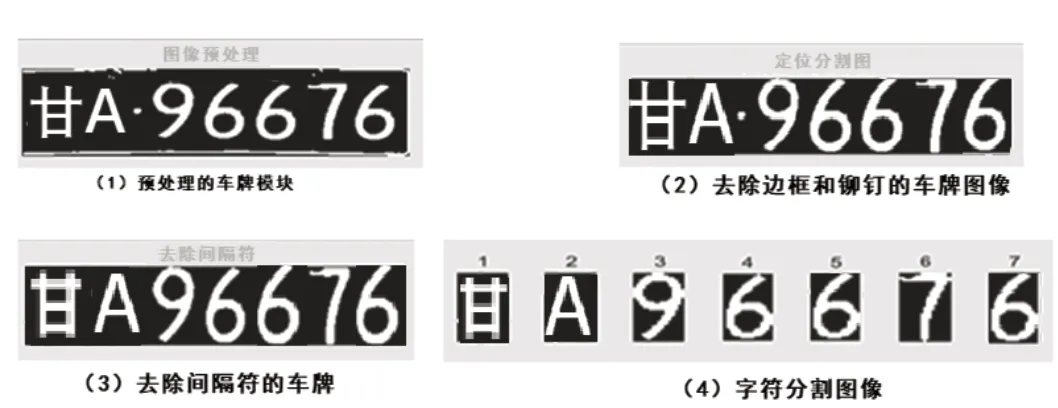
图2 字符识别图Fig.2 Character recognition diagram
3 系统技术优势
系统解决了车辆在不同特征场景中进行识别的技术关键、并根据车辆自身的特点、字符的特性,对车牌检测技术中包含的车牌定位、字符分割和字符识别三大模块做了细致的研究和改善工作。与目前现有领域相关技术相比,本系统设计在以下几个方面都具有明显的技术优势:
(1)采用人工神经网络中的多层感知机模型,算法设计科学合理,对于车牌区域的检测以及车牌字符的分割都具备了较高的准确率,且辨识速度快、辨识精确率高[3]。识别结果如图3所示:

图3 车牌识别效果图Fig.3 Effect diagram of license plate recognition
(2)对于非均匀光照的不同角度牌照的识别具有明显的技术优势。充分考虑到光照的变化规律及其所定位出的车辆周围环境和自身干扰等各种因素,提出了一种全新的将车牌进行二值化处理的方案,这种方案融合了Sobel算子法和迭代法。它的二值化效果良好,解决了有噪声影响、非均匀光照或不同角度的辨识问题,并且牌照在匹配过程中去除冗余背景图像有良好的适应性。不同光照和不同角度的识别结果分别如图4、图5所示:

图4 不同光照的车牌识别结果图 Fig.4 Results of license plate recognition with different illumination
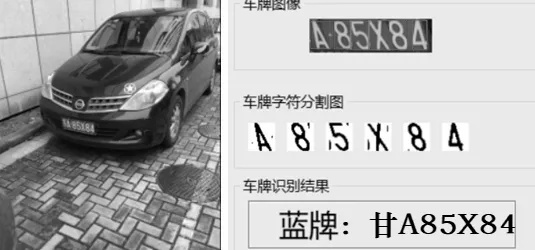
图5 不同角度的车牌识别结果图Fig.5 Results of license plate recognition from different angles
(3)在汉字相似字符的识别中,识别速度和准确率都具有显著优势。我们国家对于各种不同类型的车辆规定了不同的牌照格式,不同汽车牌照的字符颜色和号牌底色的组合也不尽相同。在日常生活中最常见的号分别是蓝底白字牌照、黄底黑字牌照以及白底黑字牌照。由于标准汽车牌照都是由汉字、英文字母和阿拉伯数字构成的,而汉字的识别与字母和数字的识别有很大的区别。为了解决这一问题,系统采用了基于欧拉数的模板匹配技术,该技术可以把模板图像根据欧拉数分为不同的分组,这不但大幅缩减少了不必要的文本匹配过程,还提高了一些相似文字的辨识度,这都提高了最终的文字辨识别品质。同一字符的不同识别结果如图6所示:

图6 同一字符不同形式的识别图Fig.6 Different forms of recognition map of the same character
4 系统测试
给系统输入不同场景、不同拍摄角度、不同拍摄距离和不同光照强度下拍摄的300张彩色图像,大小为1200×1600,进行识别测试。车牌定位、分割和识别的成功率可达98.5%,98.1%和99%,系统识别平均耗时712ms。测试结果如表1所示:
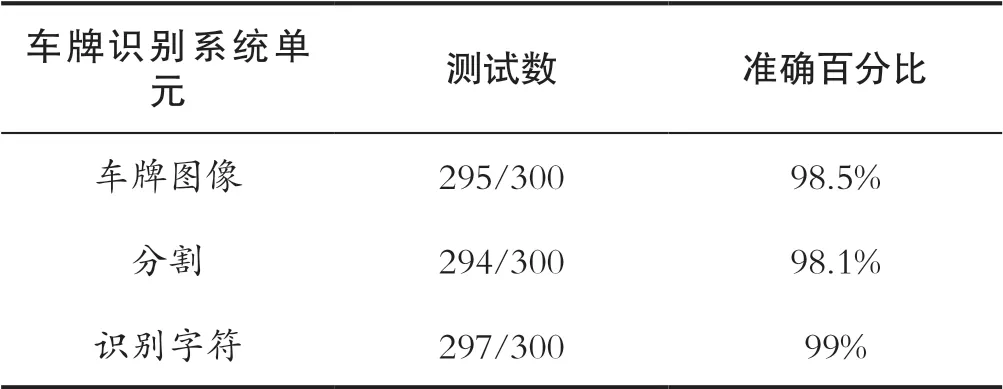
表1 系统测试结果表Tab.1 System test result table
5 结语
本系统运用先进的人工智能技术和的图像处理技术,改进了以往传统的车辆识别技术辨识精度低,识别速度慢,识别率受环境因素的影响较大的不足,能够即时精准地快速识别出车牌中包含的所有的汉字、字母和数字,并直接提供识别结果,这使得对于机动车辆的自动化化监控和管理变为了现实,对于进一步研究如何将人工智能技术应用于智慧交通领域具有一定的借鉴意义。
