CFB锅炉燃烧系统优化型PID控制器的研究∗
2022-02-18骆东松
骆东松 钱 强
(兰州理工大学电气工程与信息工程学院 兰州 730050)
1 引言
循环流化床锅炉是20世纪以来迅速发展起来的一种具有燃烧适应性广、颗粒物以及氮氧化物(NOX)排放低且脱硫效率高,并且稳定高效以及环保性能优越的清洁燃料燃烧技术,并在全世界越来越受到广泛重视。提高CFB锅炉效率的有效方法就是设计合理的燃烧系统,然而对于CFB锅炉燃烧系统的被控对象,它是一个多输入多输出变量,具有非线性、强耦合、大惯性的特点,比较难以控制的热工对象[1],经典的机理建模方法和常规的PID控制器难以满足燃烧系统的要求。
模糊控制器,虽然是有不错的容错性、鲁棒性、适应性;但其还属于是非线性控制,系统静差不能消除[2]。通过这些年的不断研究,很多研究人员提出了更好的控制器,不断的进行优化。
本文基于SSA算法和动态论域,同时结合模糊自适应PID和模糊控制,通过伸缩因子改变整个模糊论域的范围,从而更加容易整定PID参数,实现循环流化床锅炉燃烧系统良好的控制性能[3]。
2 循环流化床锅炉燃烧系统
CFB锅炉燃烧状态易受外界因素的扰动造成燃烧系统运行不稳定[4],造成这一现象的原因是CFB锅炉不仅非线性和大滞后[5],而且锅炉燃烧系统的对象比较多,它们之间存在严重的耦合,一个输入对象的变化会导致其它多个对象发生变化,这样使得燃烧系统动态特性较为复杂,相应地增加了控制的难度。如图1为燃烧系统变量关系示意图。
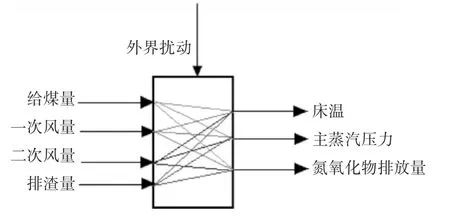
图1 燃烧系统变量关系示意图
图1对象中,床温显示了炉膛内部温度的情况,一定范围内的床温对于提高锅炉炉膛内脱硫脱硝的效率有一定的帮助,以及有利于颗粒物、SO2、NOX的排放。本文通过设计适应于CFB锅炉的SSA算法和动态论域的模糊自适应PID控制器,进行建模仿真。
本文研究的循环流化床锅炉是基于机理建模,同时得到实际实验验证,当锅炉在100%负荷下,在这里经过验证我们得到床温、主蒸汽压力关于影响燃烧系统的输入量一次风量与给煤量之间的传递函数矩阵模型[6]:

式中:床温用Tb表示、主蒸汽压力用p0表示、一次风量用 V1表示、给煤量用 M表示;Gtv、Gtm、Gpv、Gpm用来表示传递函数,s为拉普拉斯算子。
3 麻雀搜索算法原理
麻雀搜索算法(SSA),这个算法的提出是受到了一群麻雀寻找食物的启发,通过研究麻雀在寻找食物过程的同时还要躲避危险以防天敌,于2020年研究出的群智能优化算法[7]。
在一个种群里的每只麻雀,它本身有三种角色可以选择:第一是担当为种群寻找食物的领航员即发现者;第二是作为跟随者进行觅食;第三是为团队进行危险预警。它们中的每一只位置表示为X=(x1,x2,…xD),适应度值表示为 fi=f(x1,x2,…,xD)。假设种群中有麻雀M只,里面既有发现者又有跟随者,一般能作为发现者的,这些麻雀应该是它们当中位置最好的PM只麻雀,则剩下位置不是最好的麻雀作为跟随者,有M-PM只。
3.1 更新发现者位置
每代发现者的位置都会发生变化,其更新变化公式为
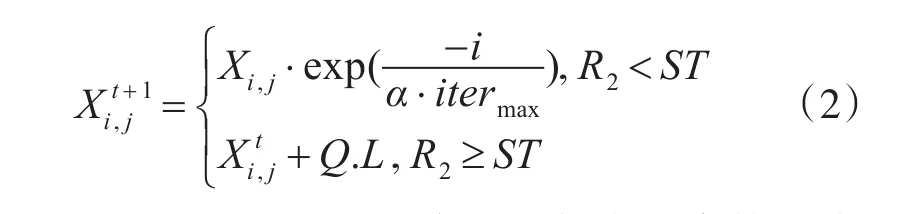
式(2)中,t、itermax分别表示当前迭代数和当前最大的迭代次数;Xi,j表示第i个麻雀在j维中的位置信息;ɑ是一个随机数,其取值范围为∈(0,1];R2表示的是预警值,ST表示安全值[8]。Q是一个随机数,且服从正态分布;L是一个1×d的矩阵且L里面元素的值全部为1[9]。更精确地描述如下:
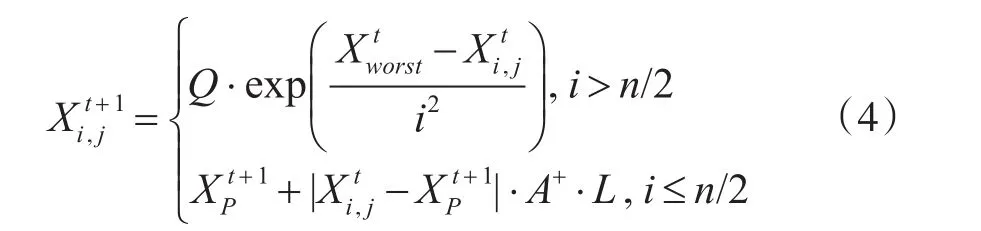
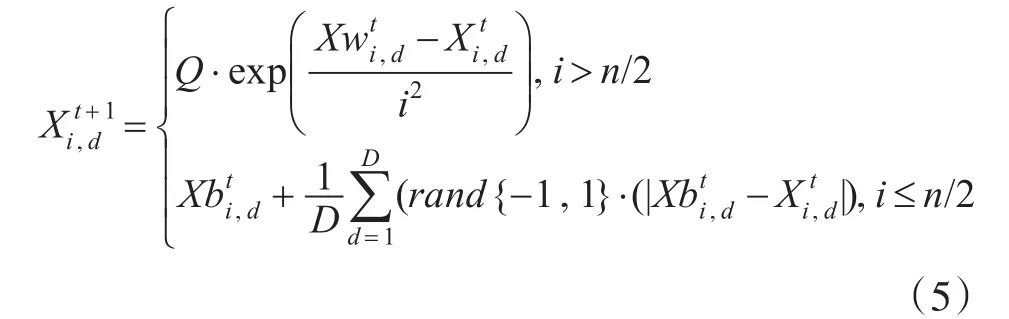
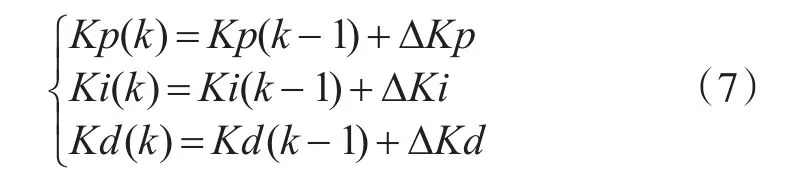
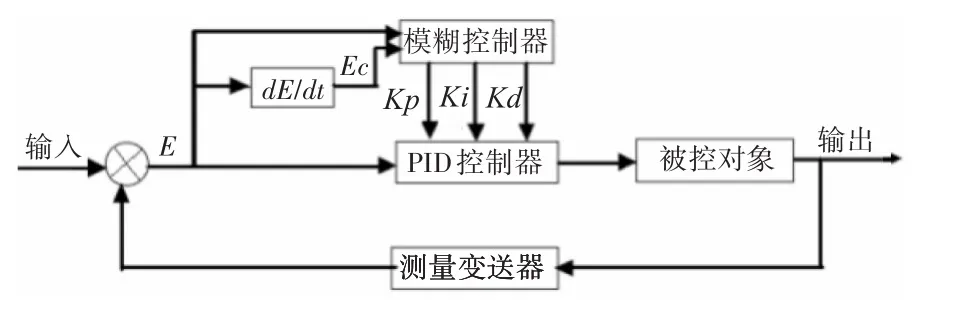
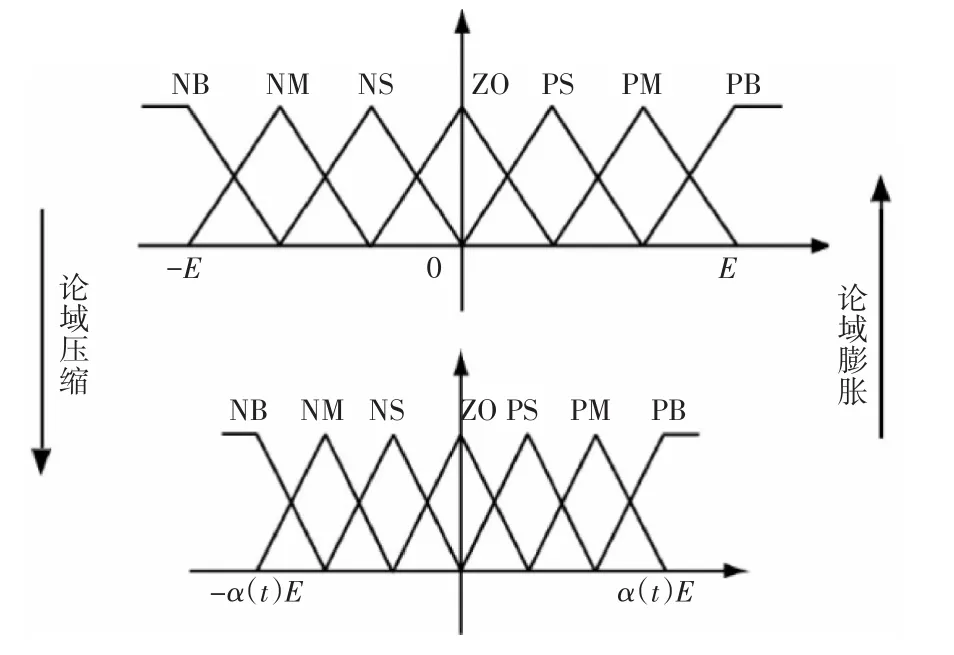
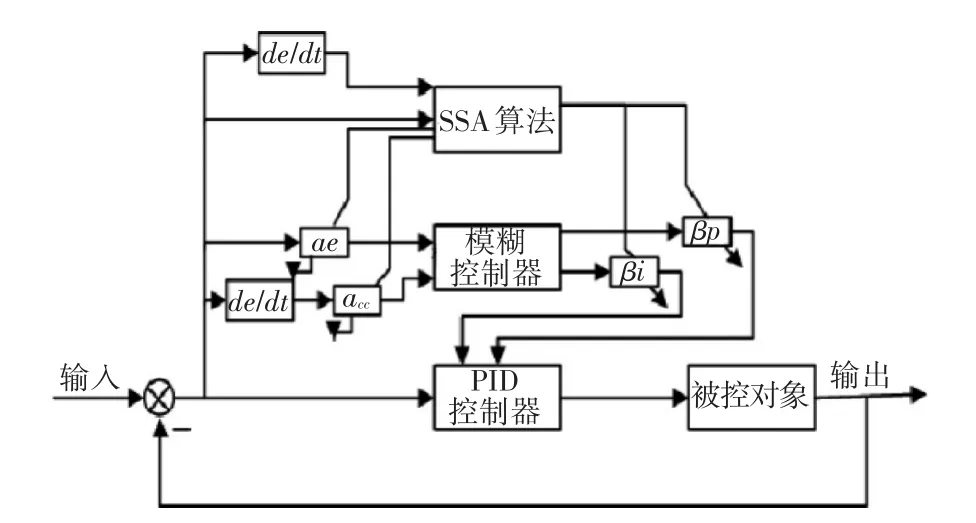
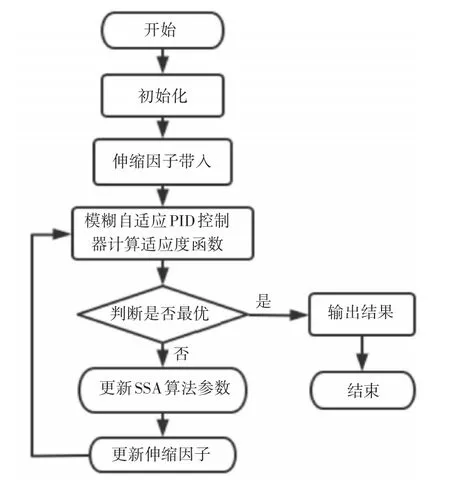
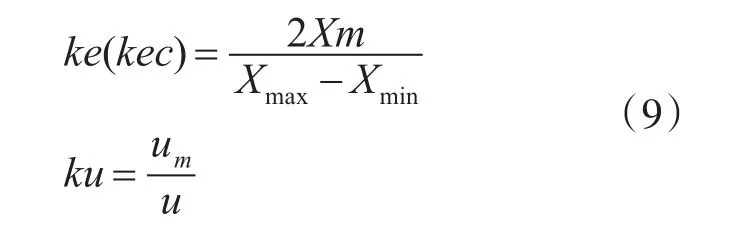
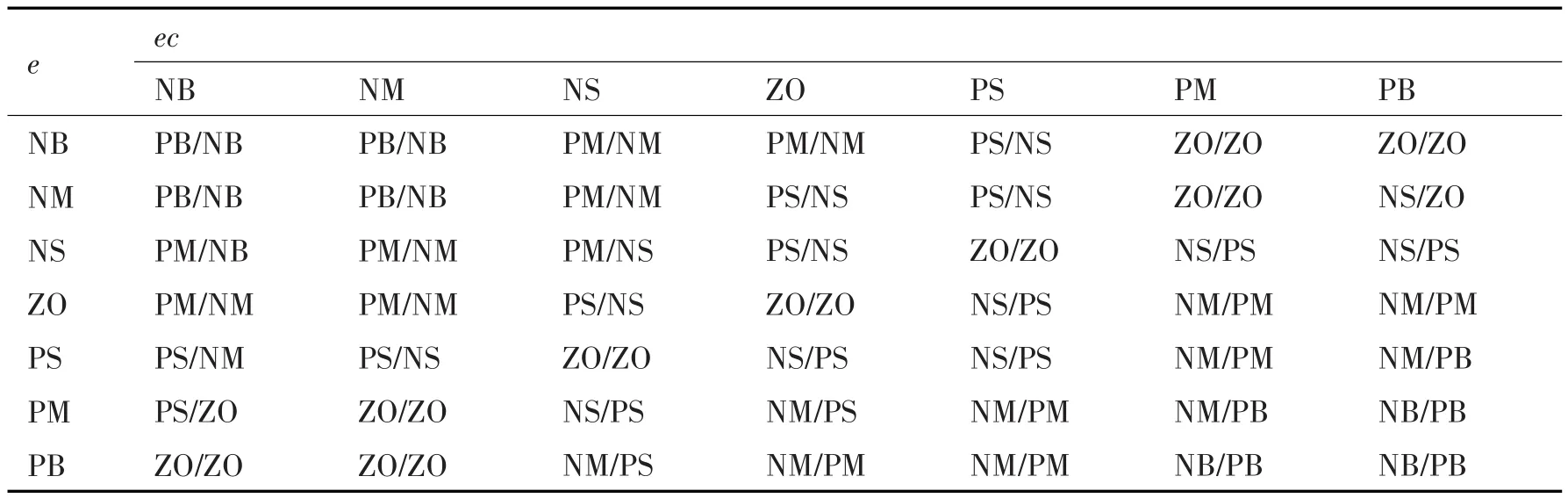
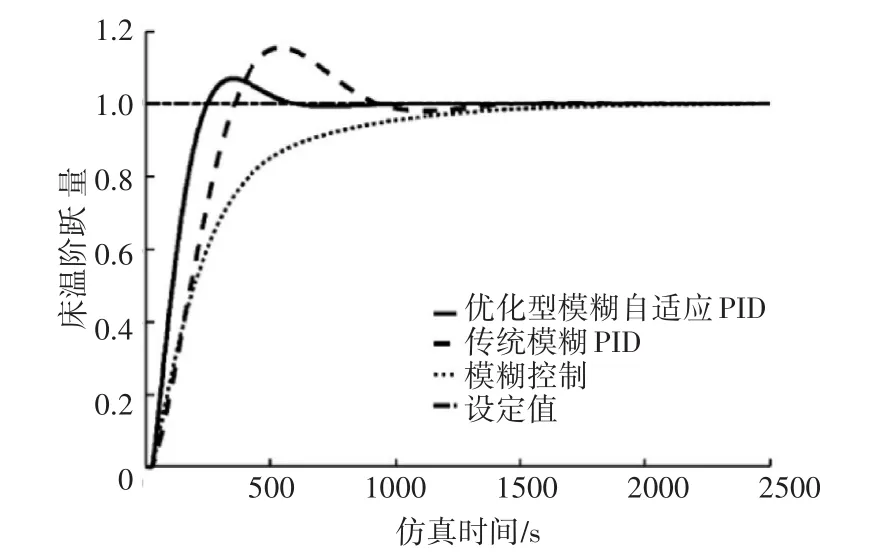
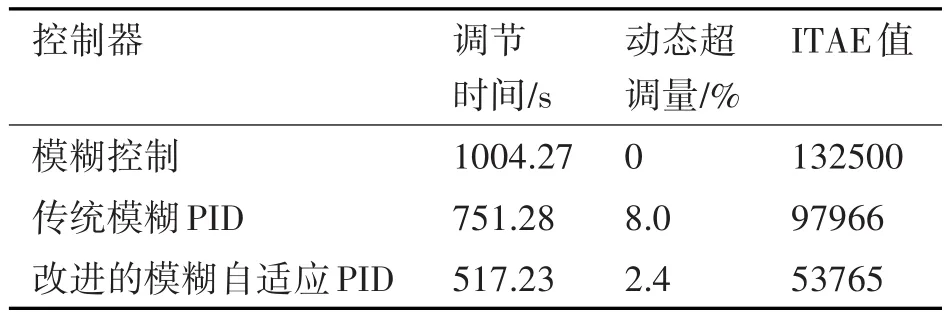
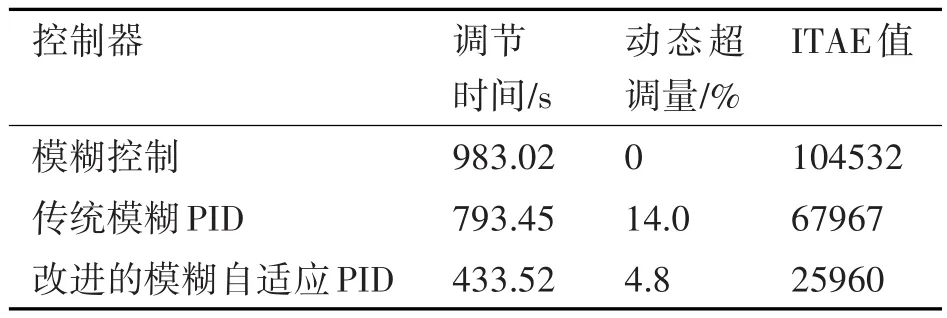
当R2≥ST时,说明危险出现,并且被种群中的麻雀发现。此时,发现危险的麻雀向种群内其它同伴发出预警,这个时候种群就会放弃当前的位置,转而寻找安全的位置进行觅食。当R2 跟随者要执行式(3)和式(4)。跟随者一旦看到发现者找到比现在好的食物,跟随者就会与发现者抢夺食物而离开现在的位置,并且如果获胜,跟随者就获得了食物,如果失败就需要继续执行式(3)。跟随者的位置更新如下: 式(4)中,Xworst、XP都代表位置,分别表示为全局的最差位置和发现者此时的最好位置。A中的元素取值均为-1或1且满足A+=AT(AAT)-1,A是维度1×d的矩阵。当i>n/2时,表示第i个跟随者没能得到相应的食物[10],此时为了生存,需要飞向其它地方寻找食物。简化其位置更新公式为 式(5)中Xw、Xb分别是目前种群中,个体的最差位置和最优位置。当i>n/2时,其值为一个标准正态分布随机数与指数函数的积,当种群收敛时,其取值符合标准正态分布随机数。当i≤n/2时,其值为该麻雀与最优位置每一维距离随机加减,然后加上当前最优的麻雀位置,将总和均分到每一维上[11]。 为防止在觅食时捕食者的出现,种群中一部分麻雀在进食的同时另一部分麻雀在进行放哨;当这部分麻雀发现危险出现时,会及时警告种群中的其他同类,此时种群内所有的麻雀都会飞往新的、没有危险的地方。种群内个体位置更新公式如下: 式(6)中,β是随机数,K也是随机数,并且β符合标准正态分布,K的取值范围为-1~1;ε的取值很小,为了避免分母的值一直不变;fw在这里表示适应度值,并且这个值是麻雀在最差位置时候的。从式(6)可以理解,当担任预警任务的麻雀在目前最好的位置时,它会飞往附近的一个地方;否则,它将飞往最优位置附近。 模糊自适应PID控制器,通常既有模糊控制器的优点又有PID控制器的优点,所以它是由这两者相结合的。并且模糊自适应PID解决了之前传统的PID存在的主要问题,传统PID因为Kp、Ki和Kd参数固定,使得它不能随误差进行调整;模糊自适应PID将模糊规则应用在参数Kp、Ki和Kd上,进行适当整定,使被控对象具有练好的静、动稳定状态。这种PID控制比传统的PID控制更加容易而且效果更好,尤其是当被控对象存在较大的时变性和非线性的时候,这种控制器比较适用[12]。其表达式为 式(7)中,误差信号E、以及它的微分Ec作为控制器的输入,ΔKp、ΔKi、ΔKd这三个量为控制器的输出。这里要对控制器的初值进行相应的整定,否则由于控制器本身的复杂结构和规则会产生很大的局限性。 图2 模糊自适应PID控制原理图 传统的模糊PID控制器,不仅具备模糊控制的模糊性而且具备PID控制的简洁性;但是不足之处在于,在模糊论域、模糊控制规则固定、模糊变量数量有限的情况下,存在局限性[13]。为了解决上述问题,引入动态时变的模糊论域,对伸缩因子进行改变,以此实现模糊论域实时的自适应调整,从而得到全工况的优良性能。图3是模糊论域的示意图,模糊论控制的初始论域范围用E来表示,在此,我们用7个级别,分别为NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大),将输入和输出变量相应地划分;α(t)是伸缩因子随时间的变化。 图3 模糊论域示意图 图4中,误差用e表示,误差变化率用ec表示,伸缩因子α∈[0,1]。当e和ec的作用逐渐缩小时,可通过α将论域缩小到[-αE,αE]的范围。这样做起到了增加模糊控制规则,同时提高了敏感度。相对应地,刚开始e与ec作用较大时,可通过α将论域扩为(-αE,αE),此时的 α∈(1,∞),这样减少调节时间,有利于系统的响应加快[14]。 图4 优化的模糊PID示意图 图5 算法流程图 在设计基于麻雀搜索算法优化的动态论域模糊PID控制器的过程中,主要在于控制指标要采用麻雀搜索算法,之后建立与e、ec有关的适应度函数;建立被控对象模型子程序,计算每个采样周期内当前适应度函数优化比例因子,计算值为下一次优化的输入值。 采用麻雀搜索算法,然后对量化因子和比例因子寻优,其中将e基本论域取值为-14到14之间,ec基本论域取值为-7到7之间的值;依据模糊PID控制器的初值,设定∆Kp、∆Ki的基本论域。由经验公式法,得初值δ=0.48,Ti=289,Td=0.001[15]。控制器传递函数为 为了计算方便将∆Kp、∆Ki的值设为[-0.7,0.7],[-0.014,0.014]。 由式(9)可求得Ke、Kec的值分别为0.5和1;Kp、Ki的值分别为0.1和0.001。 模糊控制规则如表1所示。 表1 模糊控制规则 待优化的伸缩因子公式为 进行主蒸汽压力和床温设定值跟踪试验,选择输入信号为单位阶跃信号,2500s仿真时间,采样周期为0.01s。图6和图7是三种不同控制器的响应曲线。 图6 主蒸汽压力实验曲线 图7 床温实验曲线 表2 主蒸汽压力性能 表3 床温性能 从实验结果看,本文提出的麻雀搜索算法和动态论域的优化型模糊自适应PID控制器,其动态响应及动态超调量都有了极好的改变,提高了响应速率的同时,降低了动态超调量,具有很好的动态性能及稳态性能,同时具有良好的跟随性,解决了系统静差不能消除的问题,提高了在实际应用中的效果。3.2 更新跟随者位置
3.3 侦查预警行为

4 模糊自适应PID
4.1 模糊自适应PID原理
4.2 优化的PID控制器设计
5 仿真实验
5.1 优化的PID控制器的实现


5.2 仿真结果

6 结语