基于区域空间算法的虚拟检修区域误触报警方法
2022-02-17冯德权熊咏梅谢志奇刘海力黄敏
冯德权,熊咏梅,谢志奇,刘海力,黄敏
(乌江渡发电厂,贵州遵义 563100)
近年来,以互联网技术为核心、以“工业4.0”和“工业互联网”为代表的新一轮科技变革正在深刻影响传统产业发展。而工业4.0 相关的物联网、人机互动、三维模型、精准定位、智能穿戴等技术都得到了快速发展,也在医疗、运输、应急等众多领域得到了广泛运用,为实现发电行业的智能化安全监管奠定了技术基础。
综合运用高精度定位技术、网络通信技术、智能信息处理技术等高科技手段,结合发电厂厂房三维模型,实现生产区域佩戴定位标签的作业人员的所在位置在三维模型中实时展示,实现安全管理人员能实时监视区域内作业人员的位置和活动轨迹。
因此,该文在发电厂安全监管领域提出了以物联网技术为支撑,以发电厂安全管理业务深度结合为基础,实现发电厂的智能安全监管的研究课题,为有效应对当前安全生产管理中存在的问题,提升安全生产管理水平,最大程度减少事故发生的概率和损失,提供了解决方案。
1 区域预警与区域空间算法
1.1 骨骼动画与粒子特效
优秀的视觉效果能更好地吸引人的注意力、更高效地传递信息、提升使用感受。骨骼动画和粒子特效是区分与普通三维展示的重点技术。
在人员行走时,可以使用骨骼动画。骨骼动画是模型动画中的一种,当前有两种模型动画的方式:顶点动画和骨骼动画。在骨骼动画中,模型具有互相连接的“骨骼”组成的骨架结构,通过改变骨骼的朝向和位置为模型生成动画。
标识危险区域火情、漏水时,使用粒子特效进行模拟展示。粒子特效通过三维软件开发功能模块模拟现实水、火、雾、气等效果。
1.2 电子地理围栏与三维缓冲区分析
地理围栏(Geo-fencing)是LBS的一种新应用,就是用一个虚拟的栅栏围出一个虚拟地理边界。
当人员进入某一区域时,系统通过空间相交运算,实时判定是否越界。三维缓冲区分析,可以实现人员靠近危险区一定距离时就开始提醒风险。
1.3 七参数位置转换
由于室内场景相互独立,没有统一的坐标框架。人员的位置信息也是独立坐标系统,为了完成数据的融合,需要对位置信息进行转换。文中拟采用七参数位置转换模型来进行高精度转换。
两个三维空间直角坐标系在转换过程中,一般选用数学方程组参数模型,共计设计了7 个模型未知参数,即:
1)3 个坐标平移量(△X、△Y、△Z)
表示在三维直角坐标系内所处坐标原点存在的差值结果;
2)3 个坐标轴的旋转角度(△α、△β、△γ)
根据指定的旋转角度,完成3 个坐标轴的不同角度旋转,可以最终获得重合xyz轴的两个直角空间坐标系。
3)尺度因子k
代表在两个直角空间坐标系中,同段直线所代表的长度比,尺度比例k值一般为1。
以上7 个参数通常称为七参数。运用七参数进行的坐标转换称为七参数坐标转换。定位算法图如图1 所示。
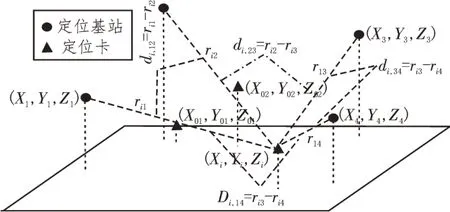
图1 定位算法图
1.4 基于WebSocket的信息快速响应
由于人员一直处于活动中,对人员的安全提醒必须做到尽可能实时,信息在系统中的传输需要尽可能的快速。文中拟用WebSocket 技术,最大限度地降低时间延迟。
WebSocket 作为实现单TCP 基础上的全双工通信协议,该通信协议在2011 年被定为国际标准,IETF 统一提出了协议标准RFC 6455,并在后续补充WebSocket 协议标准规范RFC7963,该通信协议在应用中定义W3C 为WebSocket API的标准。运用WebSocket 通信协议,可以简化系统服务器、客户终端二者之间的数据交流转换,允许服务器终端将数据简化并主动推送至客户端。在WebSocket API 协议内,只需服务端一次握手浏览器,即可建立双方之间的持久连接,实现两端的数据信息传输。
2 虚拟监测区域误触报警设计
2.1 误触报警系统设计功能需求
1)模块化系统设计,要求能够做到准确、实时且快速地采集检修区域的实际现场安全情况状态信息,并对信息进行确认后即可向中央控制器通报传输。还能够实时准确报告现场区域的险情,及时通知给监管人员;
2)用户端自动报警器能够完成现场检测传输线路及传感探测器组件本身的故障问题,并将检测区域故障及时传输给中央控制器组件;
3)需要提供报警器备用电源,对于突发停电问题可以采用自动化切换交流、直流供电,这样便可有效保障停电状态下,系统仍然可以保持正常有效的工作。
2.2 系统方案设计
文中基于坐标转换算法的虚拟检修区域报警系统,主要组件分别为定位模块、蜂鸣器(声光告警器)、电子开关等元件,如图2 所示。

图2 系统设计原理框图
该系统包括了检测电路、定位模块、控制频率模块、语音报警四大功能模块。该系统能够高效瞬时地成功检测人工无法发现的危险情况,将其转变为电路信号,实现报警器自动发出警报。控制频率功能模块能够根据差异化频率,获得相应频率警报,及时让工作人员了解检修区域内的具体情况。对于不同情况所产生的警报信号,经控制频率模块输入电路内,进而产生警报信号。然后经语音警报模块,将原本警报信号转变为语音警报。
3 系统整体设计
3.1 定位方案
UWB 高精度的人员定位系统的硬件主要由定位基站和定位标签组成。通过部署高精度定位基站,工作人员佩戴定位标签,结合人员定位软件系统实现对人员的精确定位。定位方案如图3 所示。

图3 定位方案示意图
3.2 实施架构
人员定位系统由定位硬件层、网络连接层、数据解算层和应用层组成。定位硬件层是无线定位系统实现定位功能的主体部分,包括定位基站和定位标签;网络连接层用于将定位微基站采集的数据回传到数据中心;数据解算层则是实现标签位置计算的关键;应用层针对可视化的需求,完成了业务层面的呈现。实施架构示意图如图4 所示。
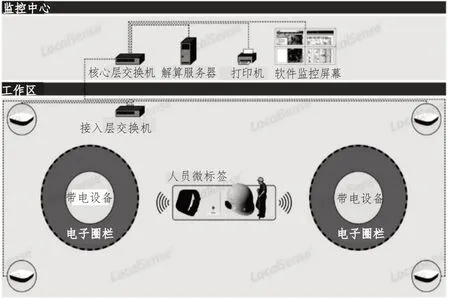
图4 定位设备实施架构示意图
4 系统详细功能实现
4.1 检测电路功能模块
检测电路功能模块作为运用坐标转换法进行误触检测的关键技术,在单稳态触发器处于稳态的情况下,一旦触发器接入外界脉冲,便会改变触发器状态为暂稳态。该功能模块采用多谐振荡器组件,成功接通电源后,将产生相应的幅值、频率波作为脉冲信号源,如图5 所示。通过系统定时功能,有效控制脉冲输出时间长短,在一定时间后便会转变原本的暂稳态为稳态,实现了差异化时间段。

图5 检测电路模块架构
4.2 定位模块
超宽带(Ultra Wide Band,UWB)技术作为近年来广泛应用的无线载波通信技术,能够运用纳秒级非正弦载波脉冲实现数据信息的高速传播,因此其所占的频谱范围很宽。相较传统通信技术有显著技术优势,经发送接收纳秒级、亚纳秒窄脉冲即可完成数据传输。
运用UWB 调制通过采用纳秒级脉冲宽度完成脉冲快速上升和下降,由直流覆盖脉冲频谱转为GHz,无需常规窄带转变RF 频率,在获得成型脉冲后即可直接经天线发射。想要调整频谱形状,可以根据脉冲的持续单脉冲具体形状,以及负载天线的特征来调整。使用脉冲宽度为纳秒级的无线脉冲信号作为定位载波,是无线定位领域的定位精度最高、性能最稳定的技术。UWB 定位系统如图6 所示。

图6 UWB定位系统技术物理层示意图
4.3 控制频率模块
在该检修区域误触报警系统设计中,系统运行会产生固定频段,为了能够成功发出相应报警声音,设计该段频率为1.2 kHz,结合该系统的设计需求,产生了1.2 kHz 频率段,此外系统选择了0.1 μF的电容组件。
4.4 语音告警模块
当检测到预警区域有人员进出时,系统自动推送告警并联动语音告警模块,通过告警声及告警光的方式警示区域人员,同时后台推送告警信息给安全管理人员,使其可以在第一时间通过实时视频的方式远程了解现场实际情况,防止安全事故的发生。
5 结束语
文中对发电厂安全生产的业务数据进行系统性的整合,即与发电厂现有的视频监控系统、Oncall 系统和多媒体安全生产教育培训系统的业务数据进行集成,实现安全监管业务信息互联互通、业务信息流的闭环管控和数据共享,综合应用物联网、三维模型、人员定位、智能穿戴以及视频智能分析的先进技术,实现生产环境安全风险的提前发现和预警,便于积极采取针对性控制措施,有效管控安全风险,预防安全生产事故,提升企业的本质安全,实现智能安全监管。