机场仪表着陆系统检验RPAS的设计
2022-02-17张梓航
张梓航
(北京理工大学珠海学院,广东珠海,519088)
0 引言
目前的飞行校验由喷气式飞机和涡轮螺旋桨发动机驱动的固定翼飞机完成,该飞机执行许多复杂的飞行动作,同时捕获和验证通信导航信号的完整性。校验飞机携带超过270kg的航空电子传感器和设备,可以进行几乎所有的飞行校验任务。然而集成电路技术的进步大大促进了航空电子和校验设备的小型化发展,使飞机任务载荷大大减轻,减小了校飞任务对平台的要求,使无人机飞行校验方案成为可能[2]。同时,无人机进行飞行校验具有进一步的优势。首先校验飞机几乎所有的飞行轨迹都是空中固定的直线、弧线或轨道,这些轨迹可以通过无人机事先编程进行自主飞行。目前受固定翼飞机的飞行轨迹限制,一些轨迹只能进行直线飞行,而无人直升机或多旋翼无人机具有垂直上升和定点悬停等特点,这可以实现空中信号的更精确的校验。其次,当前校验飞机飞行要求空域较大,需要机场净空停航配合,降低了飞行校验的效率,而无人机携带、运输方便,可垂直起降,要求空域小,而且通过减小一些不必要飞行轨迹和分阶段飞行来简化校验飞行方案,可以大大提高飞行校验的效率。另外,无人机系统可以不依赖于目视导航,因此不限于日光或晴天的视觉飞行规则[3],无人机可以在机场处于诸如深夜或由于起雾而关闭的最低限度运行的条件下飞行;而且任务模块概念和数据链路技术的发展,可以大大减少校验系统的规模和成本。
综上,航空电子和校验设备的集成化发展以及无人机系统的可编程性、可操作性、不依赖于目视导航等技术特点,大大提高了无人机进行飞行校验的可行性。
1 仪表着陆系统建模
仪表着陆系统由下滑信标台、航向信标台和指点信标台组成[4]。目前校验飞机进行下滑信号校验时主要按三条轨迹飞行,分别校验不同的项目。飞行方案如下:
(1)下滑角,入口高度,下滑角下限告警和下滑结构的校验。具体飞行轨迹如图1所示。
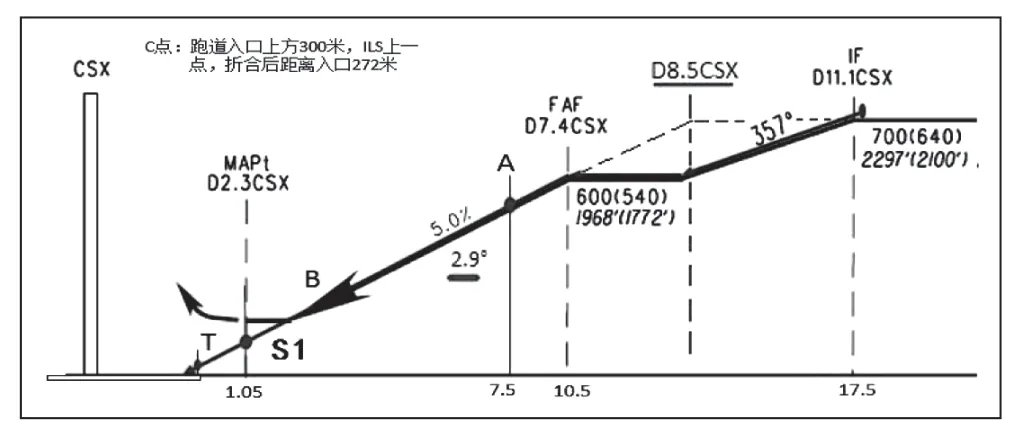
图1 飞行轨迹一示意图
图1中S1所示,从中间进近定位点开始按照ILS程序做进近飞行,按照进近航线飞行至跑道入口。利用校验飞机获取的精确定位信息,结合下滑道的理论构型以及检测到的下滑信号数据,计算出偏移误差,最后通过平均拟合的方式对A、B两点间的下滑偏移误差曲线进行处理,得到一条能够表征下滑道的直线,该直线与地平面的夹角即下滑角;同时拟合出距离跑道入口1830m~300m的最佳拟合直线,该直线延伸至跑道入口时,相对于跑道入口地平面的高度即为跑道入口高度。当ILS等级为二、三类时还通过测量A点之外,A点到B点及B点到T点的示值来检测下滑道结构;等级为一类时,通过检测A点之外,A点到C点的示值来检测下滑道结构。校验项目的标准值及容限要求如表1所示。
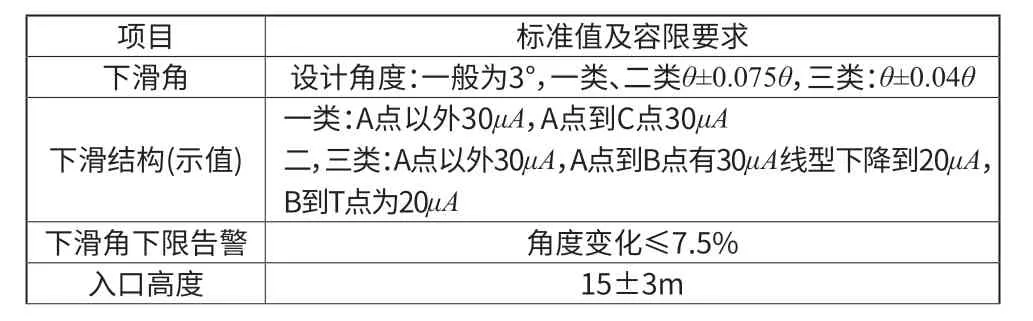
表1 飞行轨迹一校验对象的标准值及容限要求
(2)通过一条飞行轨迹完成下滑道宽度,宽度对称性和下滑道宽度告警的校验,如图2所示。
对这些参数校验目前有两种校验飞行方式。第一种飞行方式如图2中S1所示,飞机以场高1200m,距离下滑信标33.3km做水平向台飞行,检测下滑道上下两侧75μA所对应的角度,从而获得相应的参数数据。第二种飞行方式如上图S2、S3所示,以下滑道上下75μA偏移值进行飞行,通过ILS A点至B点之间,下滑道上下两侧75μA下滑偏移值的记录以及曲线的计算,获得两条75μA点迹的平均直线,通过两条直线的角度关系获得相应参数的数据。该动作检测的各项数据的指标要求如表2所示。
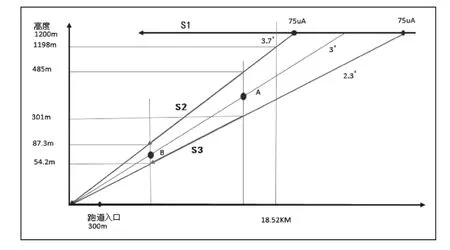
图2 飞行轨迹二示意图
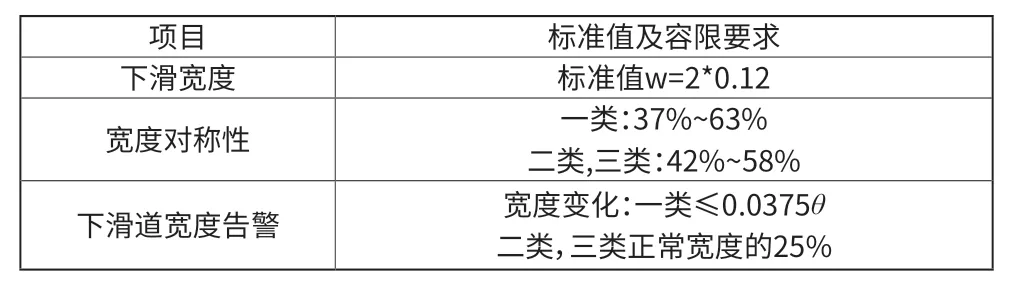
表2 飞行轨迹二校验对象的标准值及容限要求
(3)对下滑余隙及超障余隙校验的具体飞行轨迹如图3所示,此飞行轨迹是场高450m,从下滑道下方0.45θ至上方2θ范围内进行向下滑台水平飞行,测量下滑信号偏移值,计算出上下两侧余隙信号的最小值。参数的标准要求如表3所示。
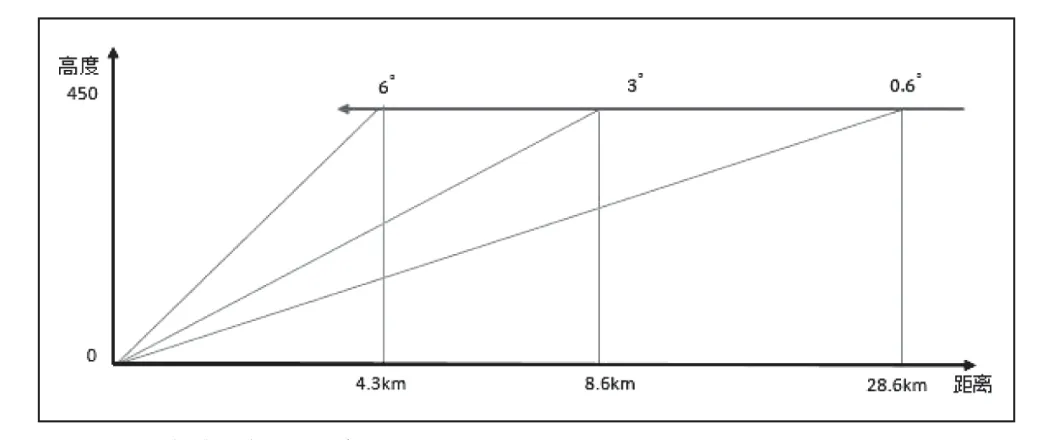
图3 飞行轨迹三示意图

表3 飞行轨迹三校验对象的标准值及容限要求
2 校验系统设计
2.1 无人机系统组成
校飞无人机系统结构如图4所示,系统包括多旋翼无人机本体、动力系统、导航控制系统和任务系统。
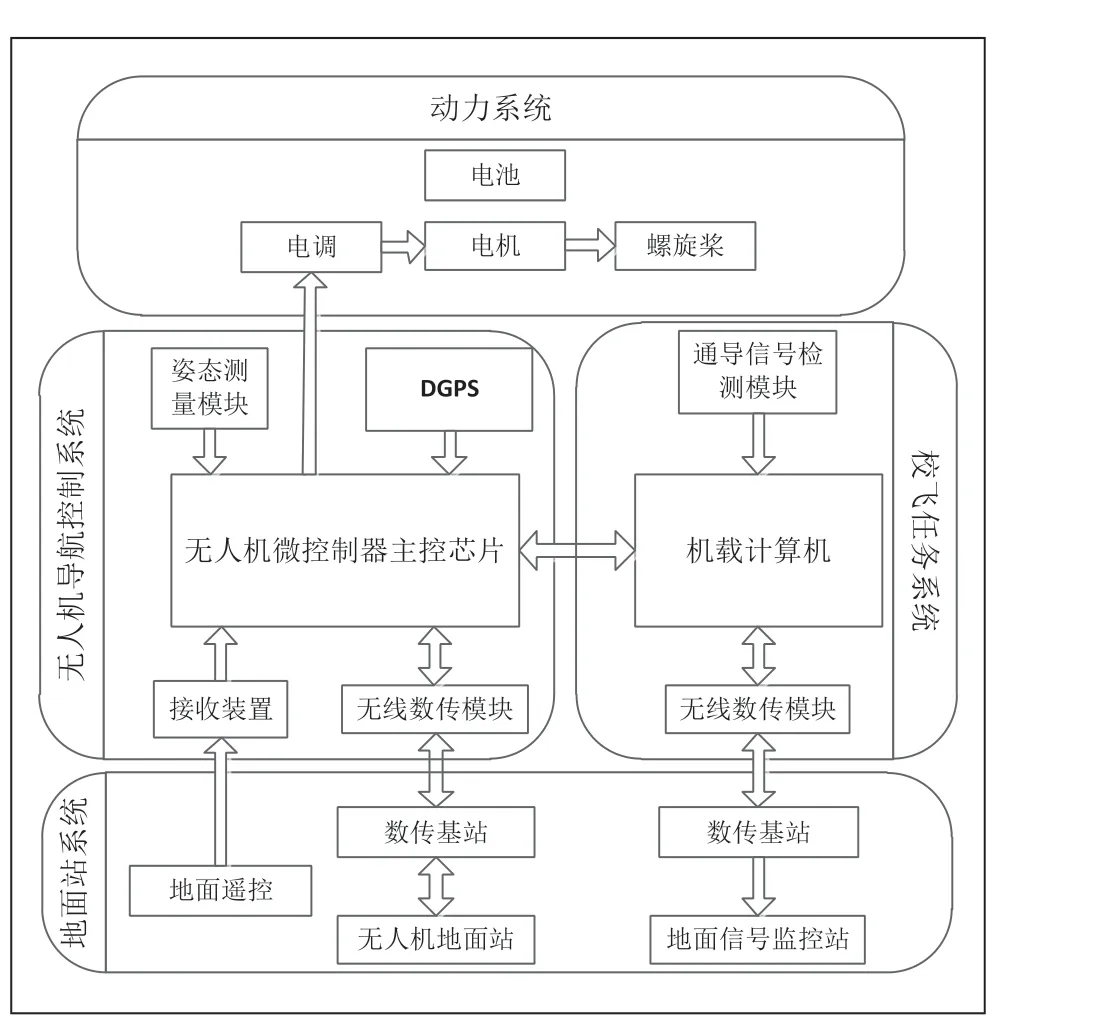
图4 无人机校验系统组成图
总体布局设计是完成多旋翼无人机总体方案初步设计工作的最终阶段,是多旋翼无人机总体设计的重要工作内容之一。
机体布局采用X字型结构,可降低整体的重量并提高飞机的机动性能。采用旋翼位于上方的布局设计,不仅可在降落时保护旋翼,又可以保证飞机上有足够空间安放下滑信号校验设备。多旋翼无人机的机体尺寸对其惯性和有效负载有很大影响,并最终影响无人机的机动性,即最大可达角加速度和位移加速度。nr个螺旋桨的旋翼无人机的机体最小半径R与最大螺旋桨旋转半径rmax存在如下关系:

在设计多旋翼无人机时,需要将重心设计到无人机的中心轴上。多旋翼无人机在前飞状态下,重心在桨盘平面的下方会使前飞运动稳定。受阵风干扰状态下,重心位置在桨盘平面上方可以抑制阵风干扰。然而实际飞行中,若机体重心在靠上的位置,无人机某个运动模态下很不稳定。因此在加装校验设备负载和电池时,将重心位置配置在桨盘平面周围,可提高无人机的飞行稳定性。
2.2 无人机校验轨迹及流程设计
结合校验任务及旋翼无人机性能特点,采用快速扩展随机树算法(RRT)[5]进行无人机校验轨迹规划,并通过弗洛伊德(Floyd)算法[6]对产生的路径进行平滑处理,最终得到最优旋翼无人机校验路径。设计轨迹示意图如图5所示。
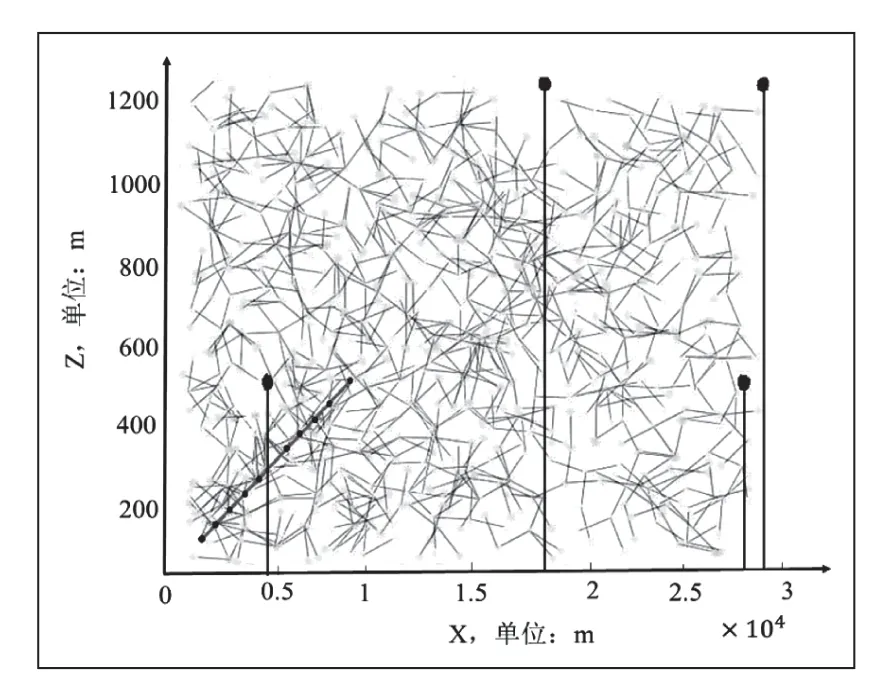
图5 无人机校验路径规划图
由于采用旋翼无人机进行飞行校验还处于研究阶段,并没有统一的操作规范。根据当前对ILS进行飞行校验的经验及无人机特点,对旋翼无人机进行飞行校验操作流程总结如下:
2.2.1 作业前准备
(1)确认待作业区域气象条件是否满足无人机飞行的技术指标要求;
(2)根据航线涉及区域向空管部门报请空域申请;
(3)现场考察,对杆塔高度、位置进行确认,规划相应的检测起降点;
2.2.2 作业任务
(1)打开遥控器和地面站软件后,为无人机上电,查看系统自检是否通过,查看通信状态;
(2)检查无人机各传感器数据,校准数据和姿态;
(3)地面站设置检测航线,并发送给无人机;
(4)无人机起飞然后按照规划航线自主检测;
(5)飞行过程中,检查无人机速度,姿态,油门,地空数据通信链路以及GPS定位 数据是否正常;
(6)完成检测任务,无人机返航降落,记录相关数据。
2.2.3 作业结束
(1)检查系统各部分状态是否正常,保存检测数据,填写无人机检测记录;
(2)分析检测数据,并根据相关规程判断 HA&G程度。
系统检测整体流程图如图6所示,地面站检测流程图如图7所示。
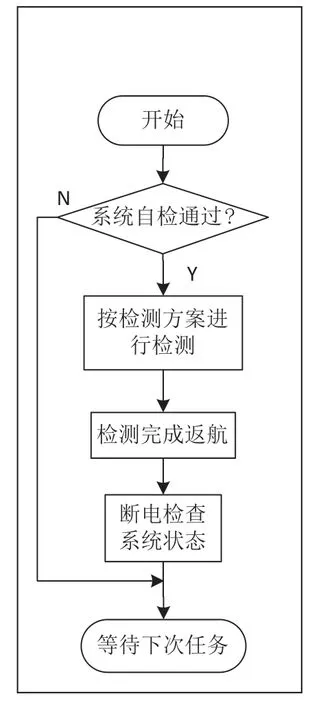
图6 系统检测流程图
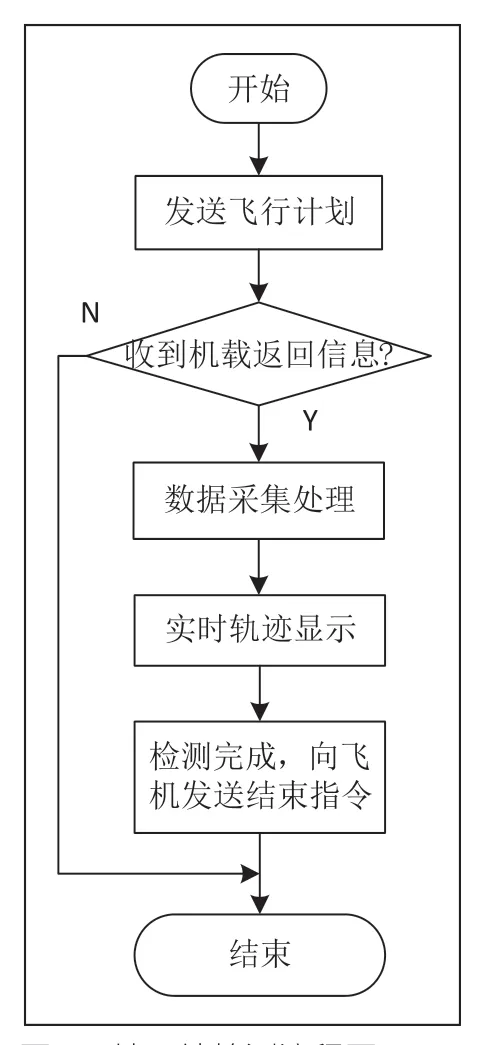
图7 地面站检测流程图
2.3 无人机组合定位算法设计优化
合定位系统松散、降维、间接、输出校正的方法对无人机定位进行设计,组合定位系统原理图如图8所示。
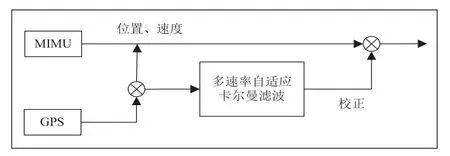
图8 组合定位系统原理图
经分析可得组合定位系统的量测方程,即位置、速度组合定位系统的量测方程为:


为量测噪声向量。
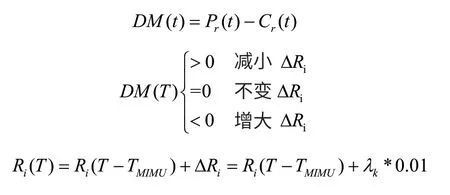
设计多速率自适应卡尔曼滤波算法的步骤为:
Step 6:量测噪声理论和实际值的一致性:
Step 7: 计算T-1时刻的量测噪声协方差修正系数βT,利用梯度检测函数计算e。
Step8:计算e:

通过比较e和ε的大小,确定量测噪声协方差调整大小λk。

Step9 :滤波增益的更新:

Step10:位置信息的状态估计:
Step11:状态估计协方差更新:
利用基于GPS测量间隙的无缝融合方法提高无人机定位的实时性[7]。GPS测量间隙利用加速度计输出数据定位[8]。但是加速度数据具有不确性噪声,采用位置前馈加速度校正该时刻的加速度信息,然后通过积分得到速度和位置,从而提高无人机定位信息的实时性,定位结构图如图9、图10所示。

图9 水平方向前馈校正图
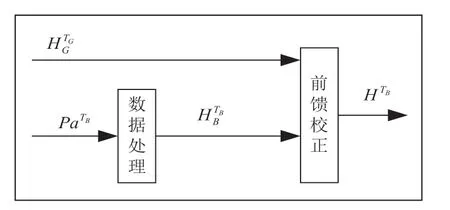
图10 垂直方向前馈校正图
其中的前馈校正利用的加权平均的方法将滤波后的加速度计和T时刻的加速度进行融合,融合后得到的加速度积分得到速度,再次积分得到位移信息。基于GPS前馈校正的无缝融合方法研究能够实时的修正无人机定位信息,保证无人机定位的实时性。
3 实验验证
项目主要研究用旋翼无人机在高压输电线与下滑信号共存的实验环境下,按照正常校验流程,检测下滑信号所受到的电磁干扰程度。使用研究所自主搭建的八旋翼无人机平台进行算法的验证,实验无人机的示意图如图11所示,下滑信号校验设备如图12所示。

图11 实验用八旋翼无人机
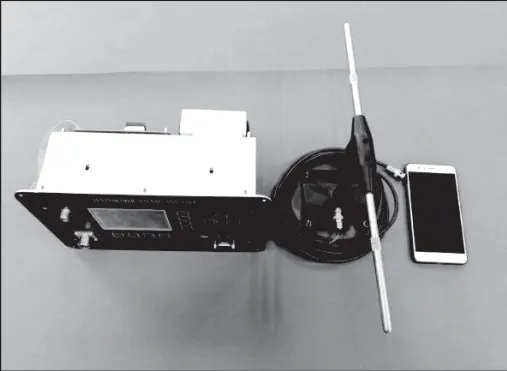
图12 下滑信号外场测试仪
在进行模拟飞行校验之前,需要验证校飞无人机在下滑信号辐射场内飞行的安全性[9]。将已经搭建测试完成的信号发射天线启动,控制校飞无人机在下滑信号辐射场内飞行,如图13所示,观察无人机的飞行状况。实验结果表明,下滑信号不会对无人机飞行造成影响,无人机可安全稳定飞行。

图13 模拟校验实验
校飞轨迹由近跑道端(即下滑信号发射端)0.6km开始,垂直起飞上升到31米高,悬停定点飞行8s,继续向远离信号发射天线端飞行,当飞行到水平距离1.0km,高度52米时,悬停定点飞行8s,然后原地降落。如此反复进行其余部分的信号测试。飞行过程中,机载计算机实时采集下滑信号和无人机的位置信息,并本地保存。图14示出了第一阶段测试的结果。
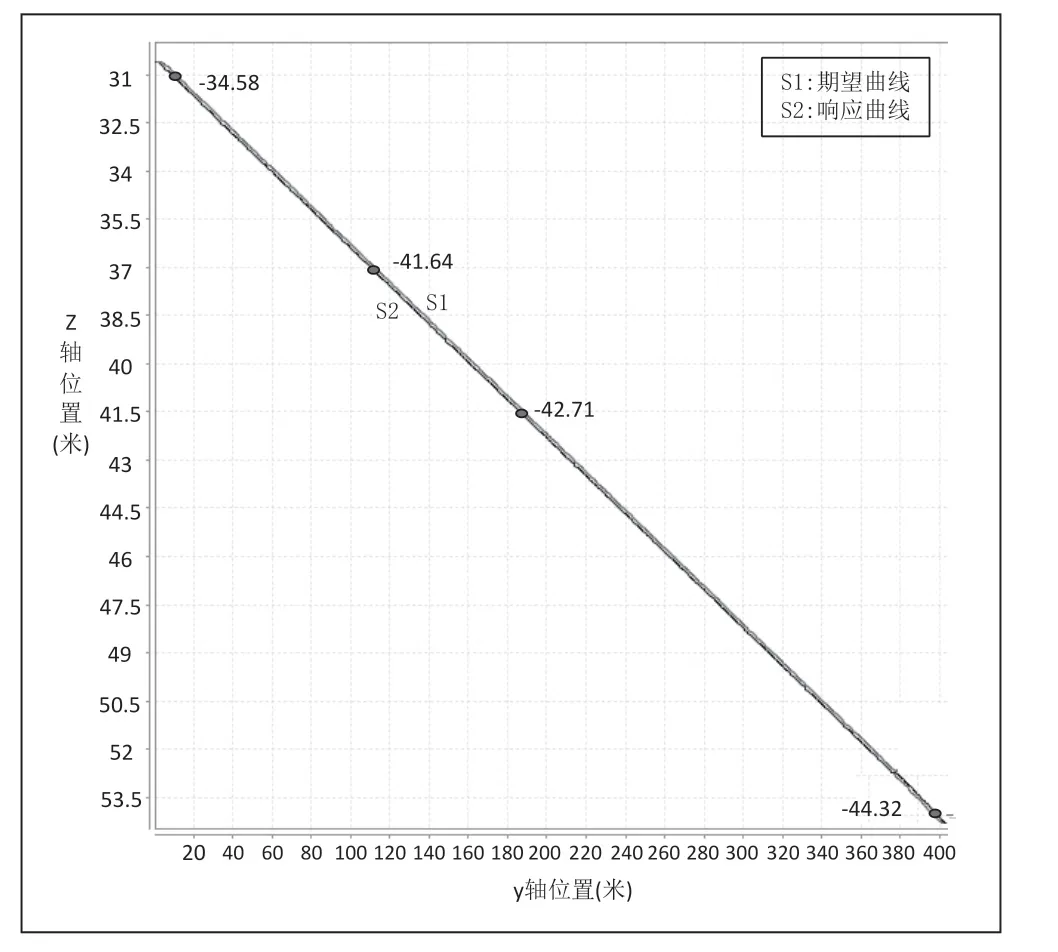
图14 信号强度变化曲线
图14中,横坐标为z轴位置(飞行高度),纵坐标为y轴位置(前飞距离),由目标曲线S1和响应曲线S2的关系可知,无人机的飞行轨迹精度较高,为校飞任务提供了精确空间位置信息。理论上信号强度随距离变大而减小,且是非线性的关系[10]。图中曲线上的特殊点示出了对应位置的下滑信号强度,可见随距离天线越远信号强度越小,信号强度趋势正确。
基于无人机PAPI灯光校验系统包括旋翼无人机校验载体和地面站两部分。在实现精确定位与精确高度控制的基础上,旋翼无人机垂直起飞,机载计算机实时对三轴增稳云台挂载的前置摄像机拍摄到的PAPI光束图像和旋翼无人机的位置数据进行处理和存储,并将数据实时传送回地面站。机载计算机实时的识别PAPI光束颜色,当检测到PAPI光束的颜色由红色变为白色时,记录当前旋翼无人机的实时飞行高度,综合水平距离数据计算得到当前PAPI灯具的仰角,实现PAPI灯光的校验。
实验所采用PAPI灯为瑞士ADB公司生产的PAPI灯具。电源:系统由恒流2.8A~6.6A串联灯光回路供电隔离变压器,功率300W。无人机在指定校验点垂直起飞,实时识别灯光颜色并记录当前无人机位置,当灯光颜色变化时,记录并计算当前无人机位置,得到灯光角度。地面站实时显示并存储位置及图像信息,出示校验报告单。
检测数据链、无人机性能、地面站等各系统工作正常后,确定校验点。以PAPI所在位置为原点(0,0,0),校验点为(15m,0,0)即灯具前15m为校验点,无人机垂直起飞,如图15(a)。同时地面站显示数据及测得角度如图16所示,16(a)图为校验无人机垂直起飞过程,当前位置坐标为(14.55m,0.44m,1.82m)表示具PAPI灯具的距离为14.55m,沿Y轴漂了0.44m,当前高度为1.82m,没有检测到灯光变化。16(b)图为检测到灯光变化,并实时记录当前角度为2.51°,误差为1'。
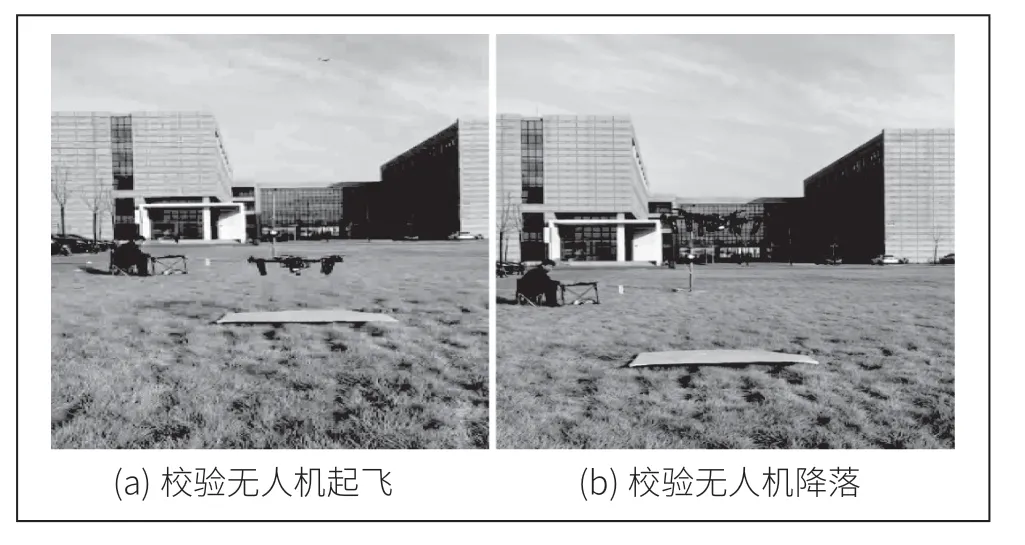
图15 校验无人机校验PAPI灯具飞行实验图

图16 校验无人机校验PAPI角度地面监控软件图
通过以上实验分析可知,根据校验原理以并在允许校验误差范围内,以无人机代替真实校验飞机对PAPI进行校验,可得当前PAPI灯具角度。满足PAPI检验任务要求的旋翼无人机载体的位置及高度控制精度误差要求,实验证明此校验方法可校验PAPI灯角度。
4 结论
针对当前飞行校验中存在的诸多问题,对旋翼无人机用于飞行校验的可行性进行了分析论述,主要从系统组成、校验轨迹设计和定位算法优化等几个方面,解决了将无人机用于飞行校验的关键技术问题。完成了对无人机校验系统流程及轨迹设计,提高了校验效率。建立了无人机位置、速度组合数学模型,采用了GPS与SINS组合定位的方式,设计了多速率自适应卡尔曼滤波无缝融合的组合定位算法。最后,以PAPI无人机校验实验为例进行介绍,验证了上述分析设计的可靠性与有效性,为将无人机用于飞行校验提供了一定的工程支持。