板球控制系统的抗干扰电路设计与分析
2022-02-16王小会李保印薛延刚
王小会,李保印,薛延刚
(1.兰州工业学院,甘肃 兰州 730050;2.中电万维信息技术有限责任公司,甘肃 兰州 730030)
0 引言
为研究非线性控制系统,寻找合适的检验平台成为越来越多学者研究的课题,而板球控制系统以其非线性、多变量、强耦合的优势作为研究自动化控制的媒介[1]。球体作为一种多变量非线性控制对象,研究其定点控制和轨迹运动对自动化控制有着重要意义。近年来,一些学者也做了许多关于板球系统的研究:Zhou等[2]采用OpenMV机器视觉模块,以其自带的STM32F765芯片为核心,集成的OV7725摄像机实时检测并计算球在板上的位置,通过串级PID控制器计算数据,输出PWM波控制舵机旋转角度,设计了一种基于OpenMV的板球系统;Zheng等[3]通过研究板球系统的控制问题,运用顺序细化算法的分段路径规划跟踪技术,提出了一种基于BPS的鲁棒快速视觉跟踪解决方案,设计了一种板球控制系统;Cao等[4]采用四线电阻屏获取球的位置,使用HC05蓝牙模块与手机通信,通过点击手机屏幕随时改变小球的定点,同时通过板球系统按钮或手机APP控制指定的轨迹运动,设计了一种基于PID算法的板球控制系统;Jian等[5]采用Mega 2560作为主控制器、运用OpenMv图像处理模块、舵机执行模块、显示模块和机械结构试验台完成硬件设计,采用PID控制算法,设计了一种基于图像识别的滚球控制系统;徐涢基等[6]采用STM32控制器作为主控芯片,以0V7670摄像头实时采集小球的位置信息,通过对小球速度采用比例-积分-微分算法,对小球位置采用比例-微分算法,设计了一种串级PID算法,共同对小球进行控制。这些文献都研究了板球系统,但对系统硬件电路所产生的干扰信号没有考虑。干扰信号是影响板球控制系统稳定性的重要因素。球体控制是否能够精确地完成相应的要求,取决于系统受到外界干扰大小,所以设计板球系统的抗干扰电路很有必要。
1 干扰源分析
在传播的过程中,信息有时会被阻断或在传递过程中发生改变。这些因素使人们接收不到完整有用的信息。信号是表示信息的物理量,对有用信号的接收造成损伤就是干扰。干扰源、传播路径和敏感器件是导致干扰的3个基本要素。干扰会使器件本身的灵敏度降低,重点是会对有用信号产生影响,进而使实验数据出现很大的误差。
2 抗干扰措施
2.1 单片机系统抗干扰
单片机内部元器件在工作中会造成干扰,并通过电源线、信号线、地址线、分布电感和分布电容进行传输,可通过接地、屏蔽、隔离、滤波、抑制反电势等方式减少干扰。
(1)接地:对于高频电路,采用多点串联方式;对于低频电路,则采用单点并联方式。
(2)屏蔽:使用铜、铝、钢等金属材料制成的屏蔽体来屏蔽单片机周围的电磁场和辐射场。
(3)隔离:一种是通过电源线和信号线分开走线,远离高频导线,适用于小信号、低电平的物理隔离方式。另一种是对收发信号的设备采用光电隔离,让设备输入端与输出端的电流构不成流通的回路。
(4)滤波:在带有负载的电路中,有时负载变化会产生噪声电压,噪声电压可以用电容、电感等储能元件来抑制。
(5)抑制反电势:电流通过含电感量的元件或设备时会产生反电动势,可通过并联二极管和稳压管或并联电阻和电容等方式抑制反电动势。
2.2 图像采集电路抗干扰
图像采集电路是监测小球在平板上的运动状态和位置,是整个系统最为重要的一环。OV7725摄像头在图像二值化处理时,它的边沿检测关系采集到的图像是否完整。当图像信号发生跳变,电压比较器的输入端会形成幅度差。在幅度差超过某一阈值时,电压比较器输出端会发生电平跳转,从而输出方波形式的图像信号。
2.3 驱动电路抗干扰
驱动电路通过上位机PWM信号对电机进行控制。如将PWM信号由信号线直接输入,舵机在运动过程中可能会出现抖动现象,降低舵机转动的精度,可以在信号发送端和接收端加上光耦隔离电路以消除抖动干扰。光耦隔离电路原理如图1所示。

图1 光耦隔离电路原理
2.4 电源电路抗干扰
板球系统采用的电源是开关电源,在使用时会产生电磁噪声干扰。在电网线路的外部干扰中,共模信号具有高频、高幅特点。它会通过导线产生电磁辐射,对电源造成的较大干扰。抑制这种干扰需要在交流电源输入端采用EMI滤波器,其电路原理如图2所示。
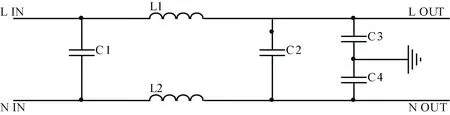
图2 EMI滤波电路
3 实验结果
对板球控制系统进行未加抗干扰电路和加抗干扰电路控制实验。将小球放置在60 cm×60 cm的平板上,以平板的长度作为横坐标,宽度作为纵坐标。小球由初始位置(10 cm,50 cm)进入目标位置(30 cm,30 cm),并在目标位置处停留,保持稳定,实验测试结果如表1所示。
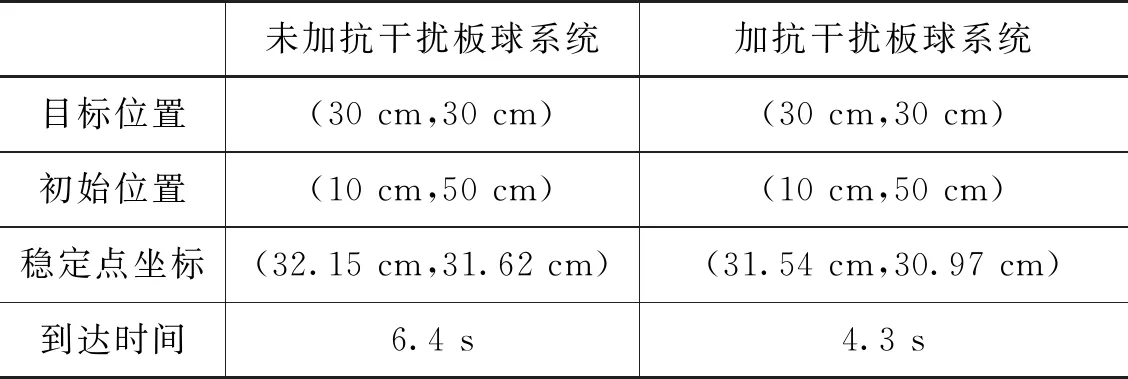
表1 板球系统控制实验数据
根据表1的结果及板球系统实物控制实验,未加抗干扰电路的板球系统,小球运动时振动幅度较大,而且到达目标位置并保持稳定的状态需要较长的时间。而加入抗干扰电路的板球系统控制小球进入目标位置并保持稳定的状态需要较短的时间,比未加抗干扰电路的板球系统少了2.1 s,距离目标位置更近,优于未加抗干扰电路的板球系统的性能。
4 结语
加入抗干扰电路之后,板球系统的快速性、准确性、稳定性等性能均优于未加抗干扰电路的系统,所以板球控制系统加入抗干扰电路后,控制性能得到很大提升。
