枸杞智能喷药机的控制系统设计与试验
2022-02-13殷文豪施爱平
殷文豪,施爱平
(江苏大学农业工程学院/现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
枸杞子(Lycium chinenseMiller)在红果期鲜嫩多汁、香甜可口,极易遭受病虫害的侵袭。在枸杞病虫害初发期即5 月上旬时,枸杞木虱、瘿螨及其他虫螨严重影响枸杞叶片的生长发育;5 月中旬时,蓟马、瘿螨和其他害虫等为害枸杞夏梢和幼果;病虫害盛发期(6—7 月)正值果实采收盛期,枸杞蛀果蛾会吃食枸杞子,影响枸杞的收成。因此枸杞病虫害的防治尤为重要[1-3]。
目前精准农业发展迅速,基于多传感器的喷施技术研究已有一定进展[4-20]。通过对宁夏枸杞种植园实地调查和查阅相关文献发现,目前针对枸杞的智能化对靶喷药技术研究缓慢,大多数枸杞种植园仍然采取均匀施喷的办法,并未考虑植株个体的差异,从而造成病虫害防治效果差和农药残留重等问题。有小部分种植园采购了国外的智能喷药机,但这些机具安装时需要加装转换支架,通用性不强且维修和售后成本较高。
基于此,本研究设计了一种智能化对靶喷药控制器,该控制器基于3WJF-600 型牵引式双臂喷药机,能够自适应枸杞植株的生长状态,建立植株树冠体积疏密度模型,实现变量对靶喷药,从而提高枸杞喷药机的喷药精度和智能化程度。
1 喷药机控制系统
1.1 设计要求
宁夏枸杞高0.8~2.0 m,种植行距一般为2 m。传感器安装在距离一行中心位置0.5 m 处,每侧安装5 个传感器,相互间隔0.3 m,两侧传感器间隔1 m。
1.2 控制系统设计
控制系统主要包括单片机、液位传感器、霍尔式流量传感器、防水型超声波距离传感器、速度传感器和脉冲变送器和触摸屏等,如图1 所示。系统通过GPS/北斗测量拖拉机行驶速度,控制系统能够实现仅在拖拉机行驶时打开喷药系统,由拖拉机行驶速度调节喷药量大小,再由布置在药箱支架两边的2组共10 个防水型超声波传感器不间断地测量各边枸杞植株的树冠大小、冠层密度等信息,将测得的信息传回控制器;单片机通过构建的枸杞植株模型和拖拉机行驶速度,输出相应的PWM 方波信号,通过PWM 脉冲变送器生成4~20 mA 的控制电流信号,调节各阀门,以实现流量控制和对靶喷药。该喷药系统通过霍尔式流量传感器可以实现实时喷药量和总喷药量统计,方便后期管理。

图1 控制系统整体结构
该系统的执行机构主要由喷药系统、柱塞泵、变量阀门、分流阀、压力表和扇形防滴漏喷头等组成,如图2 所示。程序初始化后系统首先读取药箱液位,若液位偏低则发出警告;液位正常则提示用户输入工作参数,即目标喷药量。之后由控制系统检测拖拉机行驶速度和植株相关参数,并建立模型,再通过调节电动阀门控制喷药量。喷药系统流程如图3所示。

图2 喷药系统整体结构

图3 喷药系统流程
2 喷药系统算法设计
2.1 植株树冠体积计算
枸杞植株外轮廓是类椭球体,因此,通过拟合其高度方向上的轮廓曲线(图4),再使用积分的方法即可求得树冠体积V。
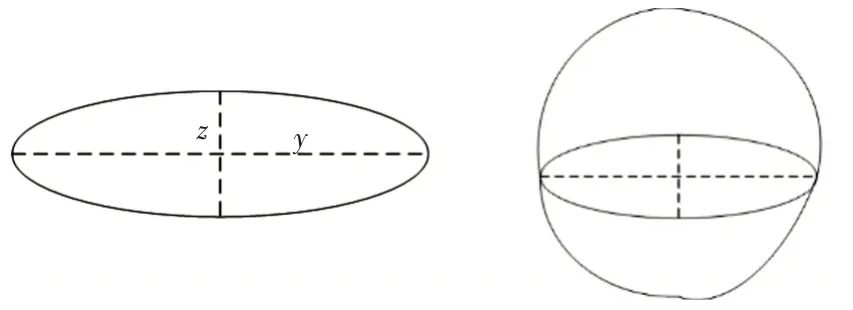
图4 枸杞树冠示意图

式中,y为高度方向上切面椭圆的半轴(m);z为高度方向上切面椭圆的另一个半轴(m);h为树冠高度(m);dx为树冠高度方向上的变化率。
对于半轴z,其在第i个传感器处的长度为:

式中,v为拖拉机行驶速度(m/s);t2为该传感器最后一次检测到树冠的时刻;t1为该传感器第一次检测到树冠的时刻。
对于半轴y,用传感器到行心距离减去测得的距离最小值即可求得:

式中,min[Y]为传感器测得距离的最小值(m)。
2.2 树冠疏密度
对于采样率为λ的第i个传感器,当其检测到树冠后,将测得距离小于0.5 m 点的个数记为n,记n和总采样数的比值为疏密度,则有疏密度f(i)。

式中,n为第i个传感器的有效采样数;λ为传感器的采样率。对5 个传感器求平均疏密度f。

2.3 加权树冠体积
为避免在植株树冠过大枝叶较疏或树冠体积小枝叶较密的情况下造成误喷,将树冠疏密度与树冠体积的乘积定义为加权树冠体积W。

式中,W为加权树冠体积(m3)。
2.4 单株喷药量
对于种植密度为D的种植园,有单棵植株种植空间上的喷药量q。

式中,q为单棵植株种植空间上的喷药量(L);Q为均匀喷施下的每公顷喷药量(L/hm2);D为枸杞园的种植密度(棵/hm2)。
单株喷药量s为:

式中,s为单棵植株喷药量(L)。
规定拖拉机标准工作速度为5 km/h,则当拖拉机正常工作在速度v时,有实际喷药量S,

式中,S为不同行驶速度下的单棵植株喷药量(L)。
3 试验
为了验证控制系统的可行性和实际效果,在宁夏回族自治区吴忠市进行试验。
雾滴沉积量能够反映喷雾的均匀性和雾滴覆盖情况,本研究根据枸杞植株的高度分别采样,对于高度大于50 cm 的较大植株分别设置上、中、下3 个采样层,将3 组水敏纸分别布置在枸杞植株的不同高度上,分别为10、30、50 cm;对于高度在30~50 cm 的中等植株,分别在30 cm 和10 cm 处设置2 组采样层;高度小于30 cm的较小植株只在15 cm处设置1组采样层,同时将较大植株减去部分树枝重新进行试验。每个高度上分别在叶片正反面各布置1 张水敏纸,拖拉机以5 km/h 的速度牵引喷药机施药,统计每次试验的雾滴沉积量,每个植株试验5次。雾滴样本如图5 所示,统计数据如图6、图7、图8 和图9 所示。

图5 雾滴样本

图6 较大植株露滴沉积量
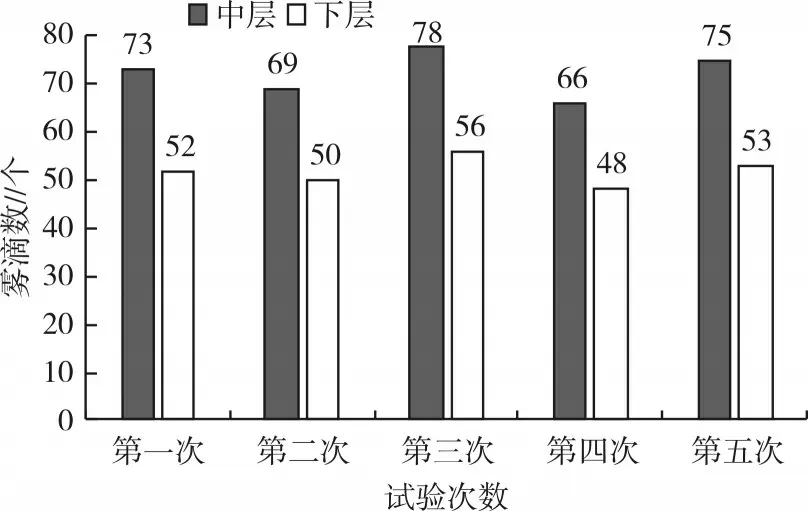
图7 中等植株露滴沉积量

图8 较小植株沉积量
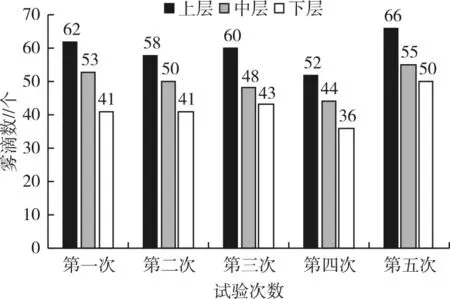
图9 剪枝植株沉积量
从现场试验来看,智能控制系统实现了对靶喷施,当不存在目标植物时及时关闭阀门,有效减少了农药浪费。对于株高较大的枸杞植株,喷药机控制系统能够识别出树冠大小并将药液充分喷洒至树冠的各部分;对于较小的植株,控制系统也能够减小喷药量并且关闭上面一组喷头。从试验数据来看,大小不一的植株叶片所附着的雾滴数较为均匀;密度小于正常植株剪枝植株的叶片雾滴数明显减少。
4 小结
本研究针对枸杞植株设计了一种智能喷药系统,通过加权树冠体积的模型算法计算出一种喷药量模型,实现了对靶喷药。试验结果表明,当拖拉机行驶速度为5 km/h 时,变量喷药能够根据枸杞植株的大小和疏密度来变量调节喷药量,相比均匀施喷能够有效减少农药使用,有效减少农药残留,且喷施均匀性较好。
