基于激光雷达的机房可视化预警系统研究
2022-02-13陈健钱星桥
陈健 钱星桥


摘要:变电站机房目前使用的视频监控装置缺少自动识别、主动监测的功能,导致工作人员在机房内作业时误入屏位误操作的事件时有发生,严重影响通信网络的稳定性。鉴于此,搭建了基于激光雷达的机房可视化预警系统,实现对机房内人员作业位置的自动感知,同时能实时分析移动轨迹,对误操作快速进行预警,防范机房设备安全风险。
关键词:安全风险;激光雷达;机房可视化;自动预警
中图分类号:TN958.98;TM63 文献标志码:A 文章编号:1671-0797(2022)03-0028-04
DOI:10.19514/j.cnki.cn32-1628/tm.2022.03.008
0 引言
随着我国信息化进程的快速推进,关键信息基础设施作为事关国家安全和社会稳定的重要战略资源的地位日益凸显。为了更好地应对威胁关键信息基础设施的网络入侵和网络攻击事件,贯彻落实《中华人民共和国网络安全法》中关于提升关键信息基础设施保护的要求,信息网络的关键信息基础设施需要建立全面的监测预警机制,实现“全天候、全方位”感知网络安全态势,变被动防护为主动监测与积极防御。
根据往年变电站的网络安全工作,发现部分机房内作业人员因工作经验不足等原因,不仅未按工作计划到相应屏位进行作业,还误入其他机柜对在运行设备进行开关、测试等误操作,严重影响通信网络的安全稳定性。
目前变电站视频监控的人机交互性差,只能被动监视,缺乏分析处理能力,不具备主动告警功能,无法协助运维人员在第一时间对机房设备误操作进行响应。为此,搭建了一种基于激光雷达的机房可视化预警系统,该系统可用于变电站机房可视化展示和监控,通过动态、实时的智能化数据轨迹分析,对人员进出屏位作业、机房环境变动实现响应告警,提高管理人员对机房情况的响应速度,有利于保障设备安全,防范网络风险,实现机房运维智能化。
1 基于激光雷达的机房可视化预警系统简介及优势
使用基于激光雷达的机房可视化预警系统,可实现对机房内计划作业范围的扫描测绘,同时自动识别人员进出作业、机房环境变动,通过高覆盖率、高精确度、高动态化、高实时性的图像采集和分析处理,生成响应告警,高效应对突发情况,实现机房运维智能化。
1.1 智能识别定位
激光雷达及UWB定位设备结合使用,可对进入监控范围的作业人员进行自动化识别及定位,精确度高,可靠性强;能自动智能核查感知环境变化,及时发现人员在机房内作业误入屏位误操作情况;无须人工操作,能克服目前人工核查视频监控低效和不完整的问题。
1.2 实时射线判断
基于射线算法,对人员实时定位及预设电子围栏等坐标信息进行快速处理,第一时间侦测出人员定位超出计划作业范围的情况。
1.3 设备风险预警
实时监测基于射线法判断结果,结合激光雷达所探测画面,实现实时风险评估、风险态势可视化展示、风险数据管理,当实时风险值大于阈值时,通过多种方式快速告警,以便及时处理设备风险。
2 基于激光雷达的机房可视化预警系统的设计与实现
2.1 体系结构
本系统按其功能可分为Web操作层和设备读取层。其中,Web操作层为用户交互层,采用B/S架構开发,用户通过浏览器直接访问系统进行相关操作;设备读取层为设备交互层,通过串口连接UWB定位设备,并持续获取定位信息,判断位置与围栏关系,进行数据处理入库。
Web操作层前端采用jQuery作为js组件库,Bootstrap作为界面库进行界面和前端逻辑开发,后端采用Python语言和flask库进行开发;设备读取层采用Python语言开发,用pyserial库控制物理串口;系统采用MongoDB作为存储数据库,驱动高并发数据读写。
系统总体架构如表1所示。
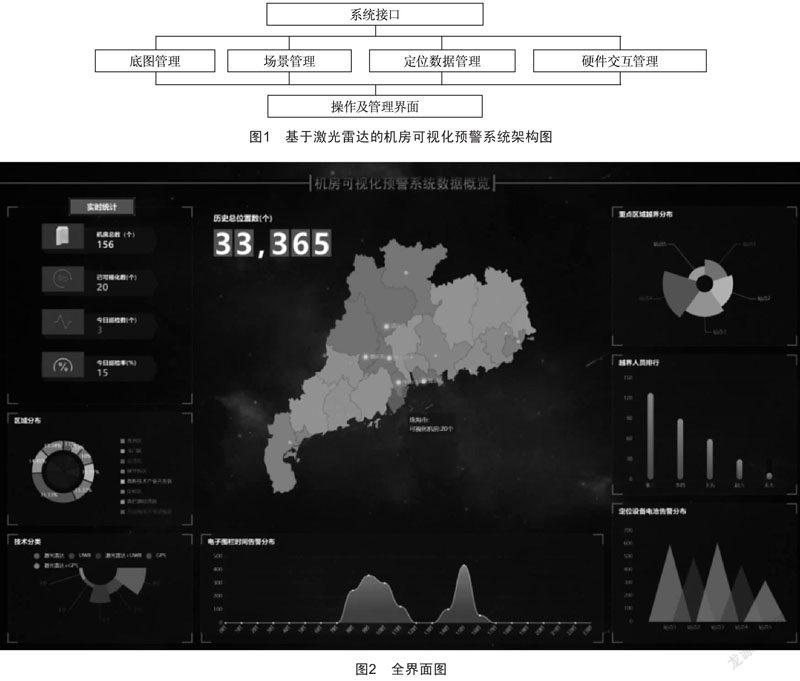
本文设计的基于激光雷达的机房可视化预警系统可分为系统接口、功能模块和操作及管理界面三大部分,架构图如图1所示。
(1)系统接口:提供基于激光雷达的机房可视化预警系统与网管系统服务器及工作站系统间接口[1],传输预警信号。
(2)功能模块:包括底图管理、场景管理、定位数据管理、硬件交互管理4个模块。
(3)操作及管理界面:通过操作及管理界面完成4个功能模块的信息展示和运维操作,实现检查终端硬件信息和系统状态等功能。
全界面图管理如图2所示,主要功能为维护位置展示的底层背景图像。该模块按照实际的物理环境绘制或拍摄平面图,按照一定的比例导入平台,平台自动识别图片分辨率、长度与宽度,计算实际大小,并维护保存和展示。
场景管理如图3所示,主要功能为将实际需要建模或巡视的物理场所、基准点、围栏坐标等进行数据关联,建立平台可视化场景,并以此为基础进行实时位置展示。
该模块通过预配置的基准位置、定位标签信息,简单拖放的电子围栏操作,实时按真实坐标展示的点位轨迹,电子围栏清晰可见的区分和告警展示,为整个系统提供了完善的交互和统计功能。
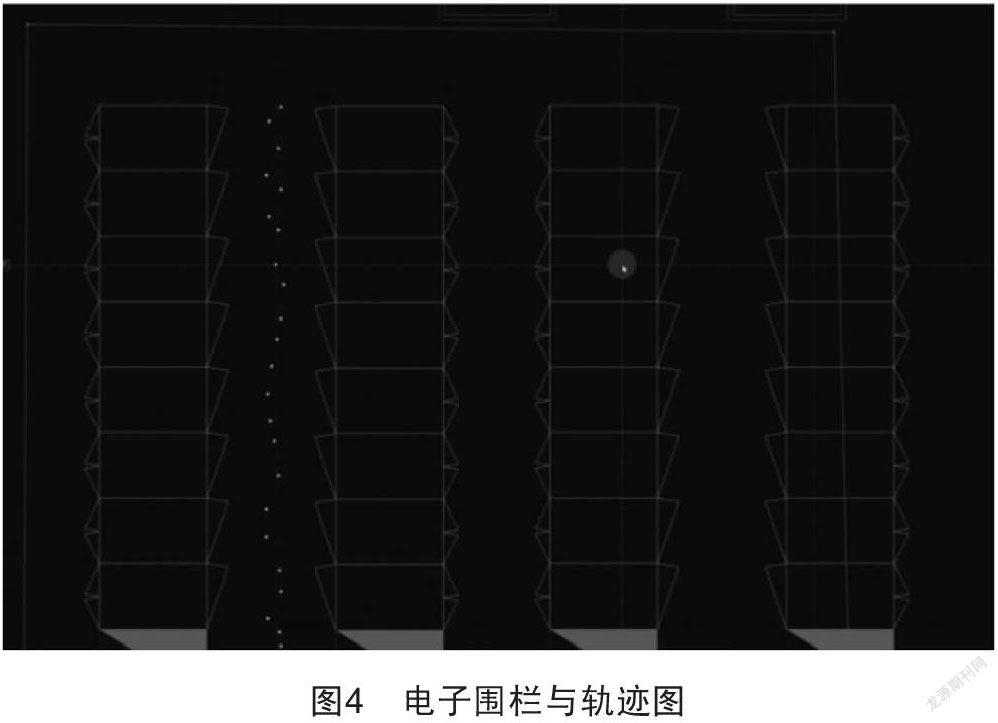
定位数据如图4所示,主要功能为定位数据存储、快速搜索和统计,包含是否位于围栏内的实时判断结果。
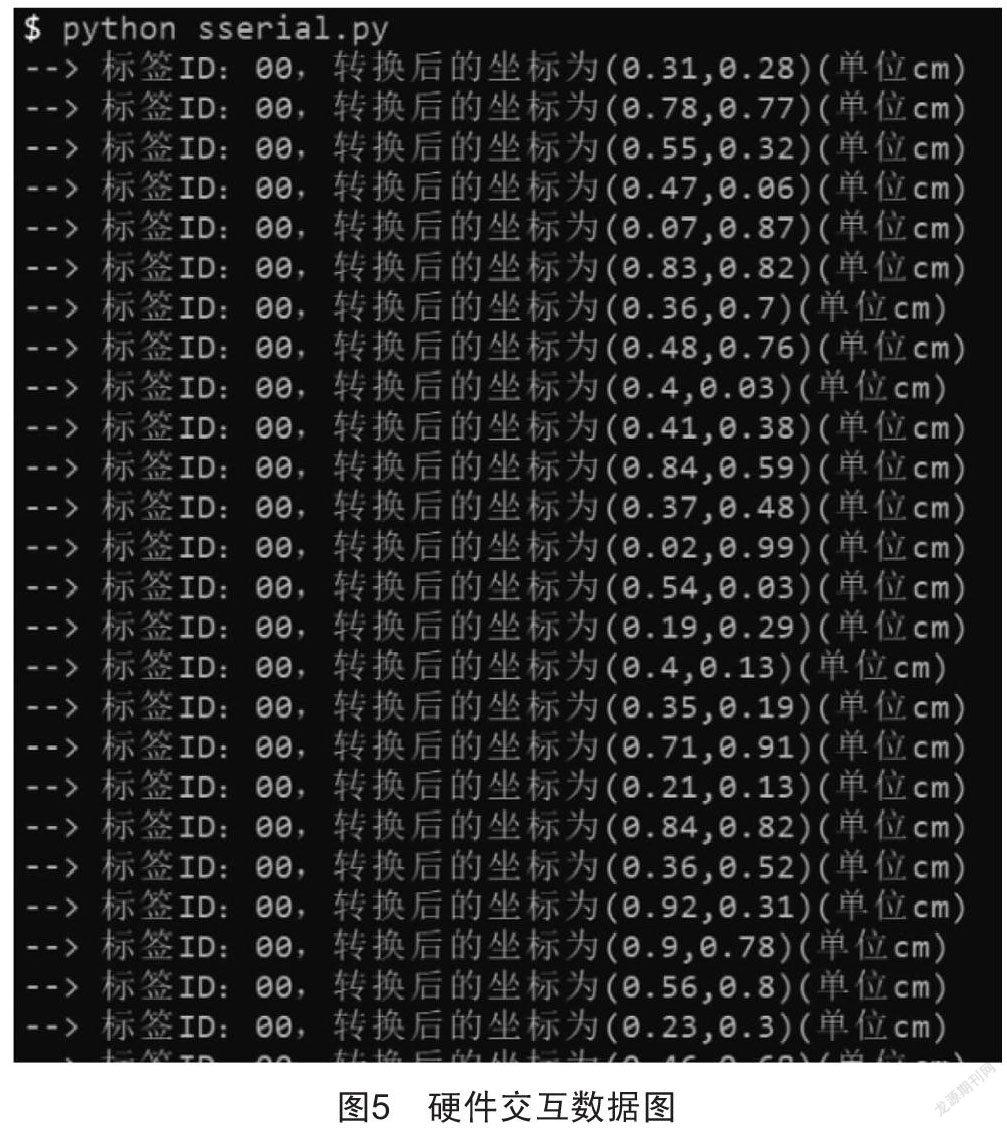
硬件交互如图5所示。通过物理串口访问UWB定位基站设备[2],发送循环定位获取指令,实时获取定位信息,并通过射线算法计算定位是否位于电子围栏内,将结果全部存入数据库。
2.2 软件的实现
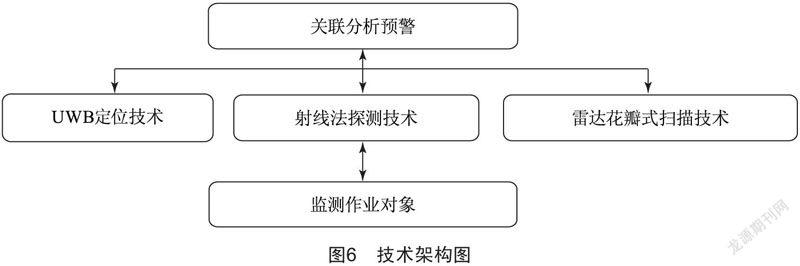
技术架构图如图6所示。对进入监测范围的监测对象进行快速识别定位,自动建立监测对象与系统内定位点坐标的对应关系[3],并对超出预设电子围栏范围的定位发出预警。对监测范围同时进行可视化管理,对人员进出屏位作业、机房环境变动等情况进行实时追踪,并动态化计算风险态势,追踪风险行为,及时发现风险动作。
3 成果展示
本硬件系统共包括4个模块:光束操纵模块、成像模块、预警模块和激光测距模块。
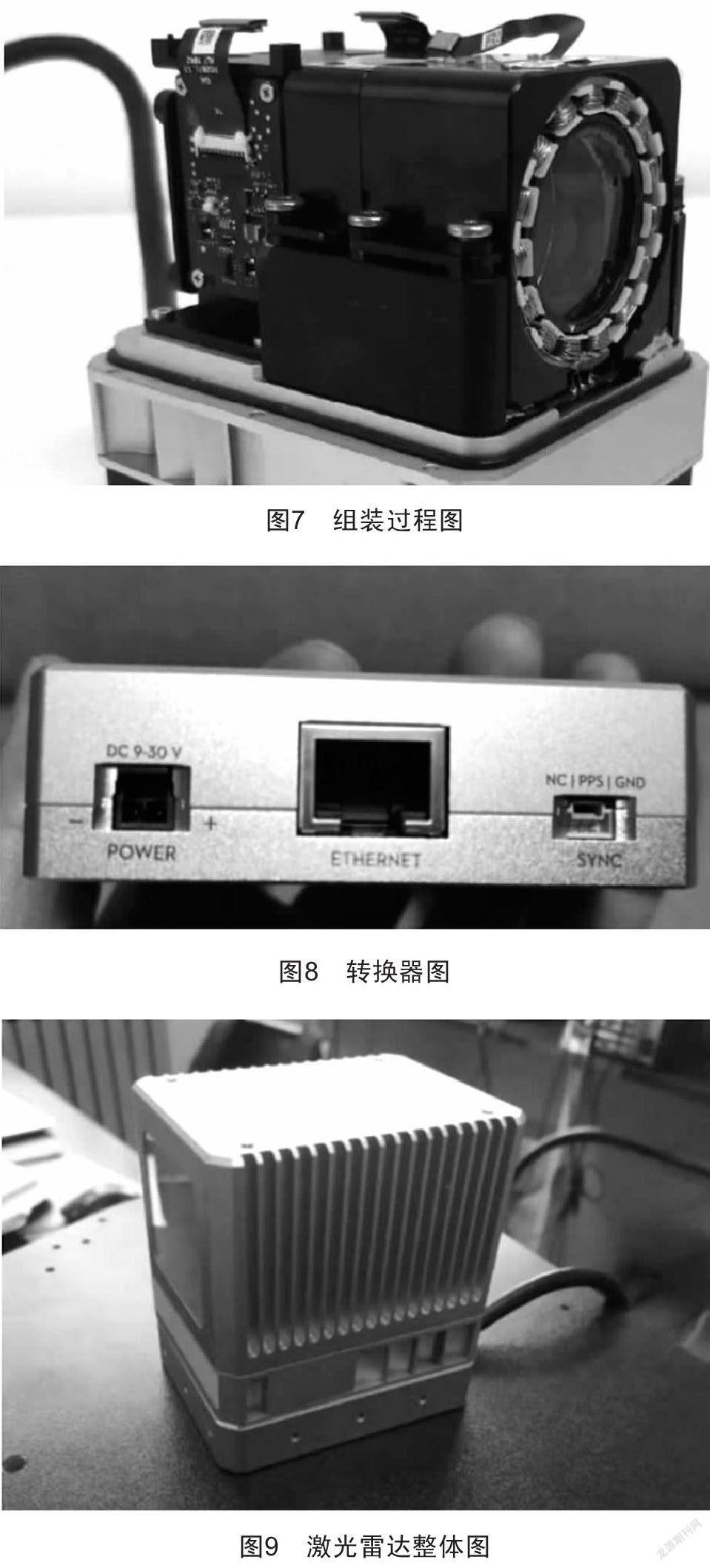
根据设计组件进行激光雷达监控系统的组装:
(1)首先对雷达本体进行组装,组装过程图如图7所示。
(2)将雷达连接到转换器,转换器如图8所示。
(3)使用以太网电缆将计算机和转换器连接到路由器,再将转换器连接到外部电源,完成组装。激光雷达整体图如图9所示。
4 结语
本文设计的基于激光雷达的机房可视化预警系统投入使用后,运维人员能够通过该系统及时掌握变电站机房内作业设备风险情况;同时,智能化监控能力的提升,使运维人员的作业更能满足机房监控需求,还能避免人力、物力资源的浪费,满足可持续发展要求,堵塞作业漏洞,最终实现通信设备安全及网络稳定,防范安全风险。
[参考文献]
[1] 祖琪,王丹,高明华,等.基于激光雷达的巡检机器人导航系统研究[J].电子测试,2018(22):32-33.
[2] 邓凯,任志敏.基于UWB技术的室内外一体定位系统设计[J].山西电子技术,2020(1):61-64.
[3] 陈旻哲,熊诚,刘守印.基于UWB的室内停车场高精度定位系统设计[J].单片机与嵌入式系统应用,2018,18(4):32-38.
收稿日期:2021-11-30
作者简介:陈健(1986—),男,广东清远人,硕士研究生,高级工程师,研究方向:电力通信。
钱星桥(1998—),男,广东珠海人,助理工程师,研究方向:电力通信。
