三维激光扫描仪在地下空间测绘中的应用
2022-02-12倪荣雷
倪荣雷
浙江煤炭测绘院有限公司 浙江 杭州 310021
引言
伴随着城市化水平的不断提高,城市快速发展与土地资源有限的矛盾日益突出[1]。作为城市的战略资源,城市地下空间可以用来建设地下交通、人防、地下商业等,具有较高的经济效益和社会效益,对城市的可持续发展具有重要意义。合理、高效地开发地下空间,促进地上地下协调发展,是提高城市土地利用效率、降低城市中心密度、扩大容量、改善城市生态环境的有效途径。
1 三维激光扫描系统概述
测绘地理信息服务是一项技术性很强的工作,既要选择测绘基准,又要确定测绘内容,还要有具体的操作技术要求和正式规范,这些都需要技术标准的约束和支持。在作业环境、测量精度、测量速度、三维建模等方面,传统的地下空间测量方法都不能令人满意。三维激光扫描技术是继GPS技术之后的又一次测绘技术革命,它集主动、高度紧凑、数字化、快速、非接触、实时、动态等特点于一身[2],是近几年发展起来的一种新型测绘技术,它集三维激光扫描技术的优点,将获取方法、服务能力和测绘数据水平推向一个新的高度。
三维激光扫描系统主要包括相位和脉冲两部分,其中包括激光发射模块、激光接收模块、伺服电机控制模块、图像采集模块、旋转滤波器、定时器、微处理器、电路板及软件等。周期性地控制激光束的发射,激光接收模块接收目标反射信号,通过石英定时器精确稳定地计算出激光发射与接收信号的时差。最终,在微处理系统中对原始数据进行处理,获得了仪器到采样点之间的空间距离。扫描系统由伺服电机控制系统以预设的角速度和方向驱动,同时控制摄像机进行图像采集,最后利用距离、角度、图像等信息,计算出点云的三维坐标和纹理。
1.1 通过系统运行平台分类
航空激光扫描系统:机载扫描系统适合远距离目标点和影像数据。该系统将激光扫描仪、GPS定位、惯导系统、高分辨率数码相机等集成在一起,是一种在飞行器平台上运行的高精度探测技术,该系统利用激光扫描和航空摄影测量原理,快速、高效地获取扫描区域的三维坐标和纹理信息。所收集的数据可产生精确数字高程模型(DEM)、数字地面模型(DSM)和数字正交(DOM)地图。车载式激光扫描系统:该系统主要集成了激光扫描装置、数码相机、GPS定位模块和惯性导航系统,安装在汽车、船舶等移动平台上。该系统主要用于点云数据采集、图像数据采集、轨迹记录等功能。扫描仪的各个组成部分是扫描仪工作效率的关键。扫描仪的精确度和视场角度的大小直接影响现场数据的可靠性和数据采集的效率。地表固定扫描系统:主要包括扫描设备、控制器、存储和供电系统、高分辨率摄像机、内控校正系统等。扫描仪是一种水平和垂直旋转镜的仪器,测量每一个脉冲信号从漫反射目标区依次扫描激光脉冲信号,测量每一个脉冲信号从漫反射目标的时间或相位差,记录水平扫描角度,垂直扫描角度和相邻两个脉冲信号的反射强度,并自动存储和计算点云数据。从扫描得到的数据和来自高分辨率数码相机的图像可通过数据传输模块传送到计算机。利用计算机软件处理点云和图像,可以快速生成点、线、面的三维模型和特征信息。手持激光扫描系统:可携带三维空间坐标在扫描范围内采集目标表面,手持扫描仪主要有三种工作方式:线缆扫描、点扫描、面扫描,一般用于测量物体的几何或曲面特征信息,通过三维模型重构扫描数据,生成物理数字模型。
1.2 三维激光扫描系统原理
采用漫反射原理激光扫描系统,保证了激光传输的信号在几乎相同的路径被扫描仪的接收器捕获。利用精确时钟获取时差,利用水平和纵向旋转电机预设速度和方向来驱动反射镜,计算目标与仪器接收器之间的距离S。该仪器记录了编码器中相邻脉冲间的纵向扫描角和水平扫描角α。用极坐标法把距离和角度变换成待测点w的坐标。扫描程序使用定制的工程坐标系,其中X轴定义在横向扫描平面上,Y轴与X轴垂直,在同一扫描平面上Z轴与横向扫描平面垂直。

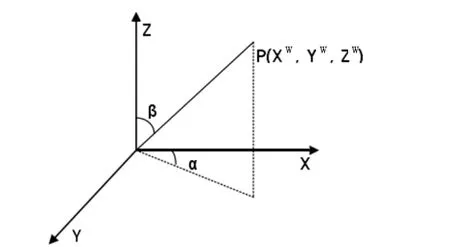
图1 扫描点坐标计算原理
该系统由激光测距仪、伺服电机、高清CCD点阵相机、微控系统、数据传输与存储模块、后处理软件等组成[3]。它利用激光测距和高精度时钟采集时间,在扫描区域内保存复杂的几何数据和图像。利用功能强大的后处理软件完成坐标输出,根据用户需要进行三维建模或提取特征信息。所以激光扫描仪需要两个模块来实现它的全部潜能:一个是扫描操作系统的模块,另一个是数据后处理软件。扫描装置配置的数据处理软件不仅能转换数据格式,还能进行数据登记和数据建模。当然,也可以使用第三方软件进行后处理。
2 地下空间测绘及其特点
2.1 地下空间测绘对象和内容
地下空间是一个广义的概念,它具有外延和内涵。地下空间是指规划区地表以下为满足生产、生活需要而开发、建设和利用的空间。地下空间设施是规划、设计、建设的具有特殊功能的设施或系统。地下空间是一种以地下空间及其设施为对象的地下空间测绘技术。对地下空间及其设施的分类有不同的规划。在规划方面,《地下空间规划国家标准(征求意见稿)》根据其主导功能,对地下空间的功能进行了规范,将其应用范围划分为七类:地下交通设施、地下市政公共设施、地下公共管理和公共设施。按照国家标准 GB/T28590-2012 《地下空间设施分类与规范》,地下空间设施按功能、主要功能特点和设施实体类别分为3类,以上两大类主要是地下空间功能和设施功能。测绘是人工确定、收集和表达物理地理要素的形状、大小、空间或面的中间位置,以及其属性,处理和提供所获得的数据、信息和结果。地下建筑是指除地下交通设施、综合管廊、地下管线、地下管线、地下管线、地下管线等以外的建筑及附属设施,其中,主要是为行人、车辆、停车设施等而建造的地下设施;综合管廊是指铺设二级及以上工程管道而在地下修建的专用隧道及附属设施,包括主干综合管廊、分支综合管廊和电缆管廊;地下管线是指地下给水、排水、燃气、热能、通讯、工业管线及附属设施;地下建筑指除地下交通设施、综合管廊、地下管线以外的其他地下空间建(构)筑物及附属设施。它综合考虑了测绘学专业基本特征、野外测绘生产经营模式、目标空间信息和属性信息的内容以及测绘成果的表现形式,使其更适合于专题或综合性。例如,地下空间的测量、制图、数据管理和结果应用(例如,地下公共管理和公共服务设施、地下商业服务设施以及地下物流和储存设施)具有相似的空间几何特征和表现形式,很容易按其性质划分设施类型和主导功能。地下空间测绘是为开发利用地下空间提供服务和保障的测绘地理信息活动,属于工程测量范畴,一般包括控制测量、状态测量、施工测量、调查等工作。
2.2 地下空间测绘的基本特点
地下空间测绘的特点是:①地下空间的特点。井下空间测绘中,在很多情况下,特征点只能确定为内角点,许多隐藏点难以直接测定,因此通常需要用相对测量来驱动测点的坐标高程。其测量方法受地下空间条件的限制。②地面和地下接触。由于地下空间的规划、建设和使用,必须考虑到相应的地面空间,即通过连接测量统一的下平面坐标系和高程基准。③主题与综合相结合。地下空间调查可以综合、专题、整体或局部地进行,按类型、功能、空间划分和所有权划分,进行专项测绘,根据需要确定专项测绘内容和成果要求。④目前对三维表达的要求越来越高,与地面地形相比,三维表达能够更加全面、直观地描述地下空间的位置特征及各设施之间的关系,三维表达是地下空间制图的基本要求。
2.3 传统地下空间测绘方法。
传统测量模式地下空间通常采用内角测量的方法;若不能直接测量内角,则用红外测距仪或钢尺测量点与被测点的距离。
2.3.1 内角测量方法。常用的地下空间内角测量方法有极坐标法、红外测距法、钢尺法等。如图2所示。
图2 内角测量方法
地下隐蔽空间边界的现场测量技术手段包括钢尺、冲击回波测厚仪、根据竣工图外推外墙厚度等。
2.3.2 反外推。因为地下空间的测量只能测量可见内角,所以有很多隐藏或封闭的部分不能被测量,因此,采用外推法进行内角可见测量。①地下空间周边边界定位计算的目的是准确计算空间建筑面积,确定地下空间周边边界的定位方法。②地下空间外部边界的位置选择原则是由内部可见角度坐标确定的。根据下面的格式,确定工程验收图纸上的外墙(不包括防水和抗震墙)的厚度,而在地下空间(包括地下室)中,房屋的长度只能测量内径,因为外墙的厚度不能测量,而外墙的厚度以竣工验收图上的标记为准,并据此计算地下空间的边长,周边边界点的确定应遵循水平面和垂直面相同的原则,以确保地下空间测量的准确性。
3 三维激光扫描仪在地下空间测量应用
地下空间测绘目的是获取地下空间边界的平面坐标和高度数据。三维激光扫描仪能快速获取被测对象表面的三维坐标,可以快速大量采集地下空间的点位信息。
3.1 三维激光扫描仪的工作流程
三维激光扫描仪用于地下空间的测绘流程,包括现场测量、控制测量、点云数据采集、点云处理、建筑物轮廓提取及三维建模。
3.2 点云采集
扫描工作前,应对地下空间进行全面调查,了解地下空间地面、地下接触通道及其位置,以及地下空间的总体分布。地下空间项目规模,依据控制点分布情况合理安排扫描测站线,留意扫描站的布局和目标布局:扫描站应该在一个安全的地方。视点宽,地面稳定,扫描范围要覆盖整个扫描对象,站数要尽量少。在目标结构复杂、观察困难、有线的情况下,应在拐角处适当增加扫描点。通过对线帧站的扫描,保证了相邻测量站间存在一定程度的重叠。在扫描空间中要均匀分布目标,相邻两个扫描站的公共目标数量不得少于3个。
3.3 点云处理
点云处理包括点云定位、坐标变换、分类降噪、分割细化等,由扫描仪采集的数据导入软件进行处理,点云数据登记,并可选取球体目标或特征点。及时将点云数据分配到不少于3个同名点,经分配后,内部匹配点间距误差不得小于规范规定的1/2。点云分类法是根据电磁波反射不同目标反射强度的信息特征,对点云数据进行分类,便于后期二维平面的绘制和三维建模。因为受到设备精度、操作人员经验、环境因素、电磁波衍射特性、被测物体表面特征和数据拼接匹配操作过程的影响,点云数据必然具有一定的降噪效果,需要通过过滤或人机交互来处理[4]。对海量点云数据进行直接处理不仅浪费大量的时间,而且消耗大量系统资源,保持适当的几何模型细节,对点云数据提取后的最大点间距应满足规范规定的间距要求,而不影响模型重建精度。
3.4 轮廓提取
描述建筑物形状的主要参数有:建筑物的特征面、 特征点及特征线。特征线是联系另外两个参数的纽带,特征点可由特征线相交得到,特征面可由特征线共面来定义。特征线一般包括建筑物的边界线、轮廓线等。利用软件的自动提取和人工手动提取相结合的方式将地下建筑物的轮廓线提取出来,用于绘制立面图、平面图等。
3.5 三维建模
利用三维激光扫描仪获取建筑物的点云数据和图像,在软件中生成建筑物的三维立体模型。由于可以将点云数据的坐标通过控制点转换到相应的建筑坐标系中,因此三维模型中的每一个点都有在规定坐标系下的真实坐标,可以直接对模型进行测量,在速度、精度、数据处理等方面具有很大的优势。
4 结束语
三维激光扫描技术是测绘行业发展的一个重要方向,其发展潜力很大,三维激光扫描仪作为测绘领域的主导产品,具有明显的优势,应用十分广泛。一般而言,三维激光扫描仪基本涵盖了测绘的各个领域,具有面积大、自动化程度高、速度快、测量精度高等特点。三维激光扫描仪在数据采集和数据精度方面的优势克服了传统测量在地下空间测绘中的局限性,结合相关软件,可快速、准确、高效地获取地下空间的平面图和三维模型,它的应用为地下空间测绘提供了一种有效的方法,对推进智慧城市建设具有重要意义。
