智能航运的研究现状与展望
2022-02-12严新平刘佳仑李诗杰王腾飞
严新平 ,刘佳仑 ,张 煜 ,李诗杰 ,王腾飞
(1.武汉理工大学智能交通系统研究中心,湖北 武汉 430063;2.武汉理工大学交通与物流工程学院,湖北 武汉 430063;3.国家水运安全工程技术研究中心,湖北 武汉 430063)
引 言
航运是以船舶为载运工具,以港口为节点,以海洋、江河、湖泊等水域为通道的运输方式,主要承担载运量大、位移距离远的客货运输,其运输能力与适应性强,通航所受限制小,运输成本低,相较于公路、铁路、航空、管道运输,具有较强的货物适应能力,在能耗、效率、生产、建设、维护等经济技术指标方面表现出良好特性。作为基础性产业在国际贸易和国民经济中占据着重要的战略地位,承载着建设交通强国、海洋强国、制造强国等重要战略,是综合运输体系的重要组成部分,在促进流域经济发展、优化产业布局、服务对外开放等方面发挥着不可或缺的作用。智能航运包括智能港口、智能船舶、智能航道、智能监管和智能服务等五个要素。本文将主要阐述了智能港口的自动化集装箱码头工艺系统、船舶自动系泊系统、船舶靠离泊拖轮智能控制系统、港城协同智能集疏运系统、港口物流与运营系统的技术现状,分析了智能船舶的“航行脑”系统与智能航行分级方法,提出了适合未来发展方向的新一代航运系统。
1 港口智能技术的研究现状
1.1 自动化集装箱码头工艺系统
自动化集装箱码头能够提高码头作业效率、降低码头人力成本,主要分为堆场垂直岸线的“岸桥+自动导引车(AGV)+自动化轨道吊(ARMG)”、“岸桥+跨运车+ARMG”以及堆场平行岸线的“岸桥+集卡+ARMG”三种工艺系统,如图1所示。
目前全球已建成自动化集装箱码头30多个,主要是堆场垂直岸线的端装卸,多采用“双小车岸桥+AGV+ARMG”作业方式。2015年,青岛港、上海港先后开始规划建设自动化集装箱码头;2016年,厦门远海码头14,15号泊位建成国内第一个全自动化集装箱码头并投入运营;2017年,上海港洋山四期码头全面启用,成为世界规模最大、技术最先进的自动化码头。此外,堆场平行岸线的边装卸,2021年10月在天津港第二集装箱码头公司实现,采用“单小车岸桥+ART+双悬臂ARMG”,ART是人工智能水平运输机器人,采用地面集中自动解锁。
1.1.1 港口装卸设备远程操控技术
岸桥的远程操控分为两个陆侧与海侧两个方面:陆侧应用远程操控系统检测拖车位置、拖车倾斜角度和吊具倾转角度,控制吊具防摇系统调整吊具姿态匹配拖车或集装箱位置,结合视频识别和激光扫描定位,实现自动着箱;海侧应用远程操控系统的船型扫描和的定位系统,结合TOS系统生成的船图,自动识别船上箱位,建立高精船图。利用多种识别技术包括激光扫描和视频识别等,融合在智能吊具上,结合已形成的高精船图,实现精确定位。装卸时只要在人工辅助下就可实现自动化作业
国外集装箱码头装卸设备的远程操作智能化发展也是近年热点。鹿特丹港的码头中,APM码头是世界上第一个采用远程控制岸桥的集装箱码头。新加坡大士港(PSA)基于光学摄像头,激光传感器和通信协议网络实现轨道式龙门起重机(ARMG)的自动化操作。ARMG起重机为全电动,具有再生驱动系统,可在集装箱下降过程中将电力返回电网。在人工智能计划平台的协助下,操作人员可从指挥中心同时监控多个ARMG,预测和优化港口的堆场作业。厦门远海集装箱码头通过中控室的远程控制台RCS和远程维修操作控制台进行ARMG的远程管理控制。其中操作员可以通过RCS操作面板的手柄摇杆操控,ARMG大车进行、小车移动,以实现远程集卡的装卸箱。除此之外,还可以通过操作按钮远程控制ARMG上的作业动作,例如吊具开锁倾转。控制台上的语音麦克风可以与现场进行通话和广播,可以使集卡司机配合作业任务。ARMG则会通过本机PLC系统解码ROS的控制指令,并完成相应的装卸作业。
1.1.2 智能网联集卡技术
智能网联集卡即采用“无人智能集卡”来进行集装箱水平运输。“无人集卡”指智能网联车辆,采用自动驾驶技术,可通过对原有的车辆进行改造并与调度系统对接来实现,如图2所示。相较于AGV方案而言,智能网联集卡无需对港口场地进行大面积改造,车辆灵活性好,路线可根据地图随意规划,且车辆选择油车、电车皆可,成本较低,又避免了AGV充电难的问题。
厦门港内拖车应用环境感知及高精地图,实现高精定位,结合智能操作系统,实现内、外拖车按作业顺序的精确运行。应用环境感知、高精地图、高精定位及自动驾驶技术实现内拖车的无人驾驶。内拖车通过环境感知系统、本地采集的高精地图、融合卫星定位的高精定位、自动驾驶等技术,实现港区作业内拖车无人驾驶。无人驾驶系统充分与ECS系统交互,利用设备的各种信息协同,实现集装箱码头作业场景的车路协同。
1.1.3 5G技术在智慧港口建设中的应用
在港口通过建设5G+北斗专用融合通信网络和多维覆盖、实时感知的泛在物联网络,实现5G港机远程控制、5G智能理货、5G无人水平运输。
福建厦门港远海码头完成了基于5G智能理货场景的实际应用;广西防城港9号集装箱泊位,借助5G网络和监控设备,实现了实时监控和自动化数据采集;浙江宁波舟山港梅山码头完成了5G+边缘计算的龙门吊远程作业控制试点;河北唐山港完成了基于5G的无人集卡车辆的场景落地。
1.1.4 基于智能传感的跟踪定位技术
码头内部装卸设备的高度自动化离不开先进的跟踪定位技术,跟踪定位技术可以为港口提供各机械设备的实时数据,具体技术为差分GPS(DGPS)、激光和雷达系统、星基增强系统(SBAS)、远距离无线电导航系统(eLoran)、北斗系统等。
西门子公司开发的已经获得专利的局域定位雷达技术(Local Positioning Radar Technology)已成功应用在HHLA集装箱码头Burchardkai。星基增强系统SBAS,比如欧空局接收卫星导航系统(EGNOS),覆盖欧洲大陆,被用作已有的GPS或者GNSS的补充。为了应对GPS的干扰问题,英国和爱尔兰灯塔局在多佛港应用了eLoran,作为独立于GPS之外的备用系统。荷兰鹿特丹港的INTIS系统全面应用EDI和电子商务系统,开发了可对船舶实施全程监控追踪并进行信息处理的IVC90信息跟踪系统、VOIR信息编辑系统和IRAS航运信息综合特种分析系统。加拿大温哥华港务局为所有 TLS(Truck Licensing System)登记集装箱卡车免费安装GPS定位装置,收集实时位置信息,并推出手机APP,给用户提供实时的港口码头操作业务的画面。港务局目前正在开发公共数据界面系统(CDI,Common Data Interface),来连接物流利益相关方,优化物流运输过程。
1.2 船舶自动系泊系统
自动系泊是船舶完成自动靠泊控制后需要进行的一个重要步骤。传统的船舶系泊方式是用粗大的缆绳将船舶固定在码头上,系泊作业时需要一定数量的带缆工人和带缆艇。这种依靠系缆工人的传统系泊方式下,工作效率低、工作环境差,作业困难,存在很大的安全隐患。而自动系泊技术的应用能够极大地改善靠泊工作人员的工作强度,解放生产力,让航运全程无人化的步伐再次向前迈进一步。主要分为有缆自动靠泊系统和无缆自动靠泊系统,如图3所示。有缆自动靠泊系统通过机械手臂将船舶缆绳系在码头岸基,当船舶离港时,机械手臂自动将缆绳松开,缆绳绞车将缆绳回收。无缆自动靠泊系统不需要缆绳固定,通过机械手配合吸盘将船体固定。
船舶自动系泊系统的关键技术包括:动态遥控牵引与拖带负载监控技术、系泊作业机械臂装置互操作技术、系泊过程动力定位与姿态感知技术、系泊系统轻量化设计技术、磁力吸附与真空防撞技术。
瑞士的 CAVOTEC公司最早在2003年在澳大利亚墨尔本和德文波特港口建立了无缆自动系泊装置 MoorMaster(如图4所示),并采用了相关专利技术来适应局部潮汐引起的位移变化。CAVOTEC公司还根据不同港口需要定制设计无缆自动系泊装置,为黎巴嫩、南非等国家港口设计了大型能源船舶无缆自动系泊装置,为挪威、澳大利亚黑德兰港设计了大型散货船舶靠泊装置。在2017年,CAVOTEC公司在芬兰赫尔辛基港推出了最新的无缆自动系泊装置。该系统能在-25℃下正常工作,是目前世界上最先进的无缆自动系泊装置。
荷兰的M am p aey公司采用自动系泊程序,并能持续、实时地监控和控制船舶,其机械手臂能自由升降、俯仰和滚转运动,能结合海况环境实现摇摆和偏移,并在系统中增加了冗余和故障保护组件,提高设备安全性。图5是该公司设计的智能系泊设备(IDL),该系统使用磁性阵列,在主控单元、PLC控制器和通讯模块的系统架构下,通过3个矢量液压缸实现对目标船系泊的自动控制。Mampaey岸基固定式磁力和机械手磁力系泊设备的示意图如图5所示。
1.3 船舶靠离泊的拖轮智能控制系统
传统的船舶靠离泊拖轮作业主要存在以下问题:一是依靠操船人员瞭望,作业过程中要求操船人员精神高度集中,加重了人员的精神压力和工作负担;二是拖轮视线受影响大,易发生船体刮擦和碰撞;三是顶拖过程中船舶受力情况复杂,船舶摇摆容易造成碰撞;四是拖轮未能按照轮驳公司希望的经济航线完成各项任务。为改进上述问题,世界各国都开始了拖轮智能控制系统的研发,其中三类典型的成果如图6所示。
船舶靠离泊的拖轮智能控制系统关键技术包括:拖轮智能调度技术、拖轮自主随航与锚定技术、多拖轮靠离泊协同技术、拖轮自主伴航技术、多拖轮牵引力再分配技术。
瓦锡兰Intellitug智能拖轮项目是由技术提供商瓦锡兰牵头,与PSA Marine、劳氏船级社、新加坡近海和海洋技术中心合作,由新加坡海事和港务局与海事创新和技术基金支持。该项目以PSA Polaris号港作拖轮为载体,以自动识别系统、全球定位系统、光/热成像摄像机、自动识别系统接收器、K波段高分辨率雷达、运动参考单元为航行态势感知及定位手段,以自研动力定位系统为位置及动力分配手段,以智能学习算法为导航及避碰手段,以自主船舶模拟器及实船海上试航为测试手段,最终实现船舶的辅助决策与自主航行。
中国电科36所旗下控股的中电科(宁波)海洋电子研究院有限公司研发了基于北斗导航的港作拖轮智能航行系统,成功应用于天津港轮驳公司4艘智能拖轮,实现多目标船舶航路设计和优化、基于激光雷达的近距避碰安全预警、基于电子围栏和作业区的油耗统计及航迹管理、船岸通信和远程传输等功能。
水利行业能力建设成效显著。深入开展以为民务实清廉为主要内容的党的群众路线教育实践活动,全面贯彻落实中央八项规定,深入学习党的十八届三中全会精神。水利行业廉政风险防控工作持续推进。基层党组织建设扎实推进。水利新闻宣传工作成效突出,水情教育工作取得积极进展,水利精神文明建设和机关文化建设成果丰硕。基层人才队伍建设和高层次人才选拔培养得到加强。
1.4 港城协同的智能集疏运系统
港口与所在城市的港城融合发展对集疏运提出了更高要求,而传统水平运输载体的集卡尽管具备服务灵活等优势,但给城市交通带来了巨大压力,探索立体智能化、绿色低碳化运输已成为港口集疏运发展的大势所趋,近年来出现了用于集疏运的智能空中轨道、无人集卡专用道等[1],如图7所示。
港城协同智能集疏运系统的关键技术包括:枢纽型港口陆侧交通需求预测与交通组织、港口集疏运系统综合交通规划仿真、面向多式联运和节能降碳的集疏港铁路规划设计、面向特大型港口集疏运的地下集装箱物流系统规划、集装箱港口站场间的智能空中轨道集疏运系统规划、全程运输链业务协同的港口集疏运信息共享平台、统筹港口集疏运与城市交通流的综合交通控制技术及管控平台、集疏港铁路大宗货物重去重回的运输组织技术、港口综合交通枢纽多种运输方式衔接的标准化技术。
上海洋山深水港区集疏运体系采用了节流和开源两种策略。节流策略是通过“削峰填谷”的方式,降低高峰日以及高峰小时交通量,如在东海大桥的陆端临港地区规划一个港外集装箱中转堆场,集卡只须将货物送到临港的中转堆场即可。开源策略是采用无人驾驶、编组运营的方式,降低车头时距,提高港区道路通行能力,如在既有道路的单向3车道中选择2条作为无人集卡专用车道、1条作为社会车辆和特种集卡专用车道。
1.5 港口物流与运营系统
当前港口物流与运营存在以下问题,一是信息孤岛严重、信息链不贯穿、数据资产浪费,二是供需信息不对称、港口资源配置有待优化、集疏运结构有待改善,三是软件系统存在卡脖子难题,Navis N4系统在国内码头占比过高,因此,有必要研发我国自主可控的港口物流与运营系统。
港口物流与运营系统的关键技术包括:港口物流数字化运营技术(如生产运营的区块链技术、港口生产状态数字孪生技术、港口基础设施的BIM数字化技术、5G、IOT、大数据、云计算等信息基础设施建设)、港口物流智慧化运营技术(如生产计划智能决策与智能调度、生产运营设备智能管控、生产运营状态在线监控、商业智能辅助决策系统、生产运营管控系统集成平台)、以及港口物流运输结构及其资源优化技术(如智慧绿色港口顶层设计及其物流资源整合、智慧绿色港口物流系统新型工艺及其仿真评价、智慧绿色港口物流系统智能决策技术及其评价、智慧绿色港口集疏运体系规划设计及其优化决策、智慧绿色港口多式联运规划设计及其优化决策)。
港口社区系统(PCS,Port Community System)是一种组织间系统(IOS),它是通过电子方式集成港口社区内公共和私人参与者、技术、系统、流程和标准的异构组合。PCS提供关键的IT/IS服务,并在港口运营的组织之间建立电子通信联系,这些组织包括托运人、航运公司和远洋承运人、码头运营商、货运公司和各主管部门(例如,港务局,海关当局,水警,兽医等)。根据港口规模大小,连接到PCS的港口数量从一个到多个不等。PCS的核心目标是通过提供用于交换港口相关信息、文件的公共信息平台,来促进无纸化运作。这些信息和文件是有效管理港口操作和程序所必需的,例如与海关处理、进出口报关、运输有关的订单、危险品申报等。因此,PCS的目标是长期改善管理和物流流程。在国外港口中,比利时安特卫普港的港口社区系统(APCS)电子通讯平台,提供了一系列针对无纸化运输管理的应用程序,其信息控制系统(APICS)能够引导港内和海运航道上船舶航行。鹿特丹港务局加入BIM Basis Infra,实现了数字基础设施的信息交换;深圳妈湾港应用了数字孪生管控系统;武汉阳逻国际港使用了集装箱水铁联运系统;青岛港采用了智能空中轨道集疏运系统。三种典型的港口物流与运营系统如图8所示。
2 船舶智能技术的研究现状
2.1 智能船舶发展概况
近年来,智能船舶成为国内外航运领域研究机构、学者关注的重点,已开展了船舶智能系统、智能航行、岸基远程驾控、船舶编队航行等研究与试验工作,目前正在积极发展智能船舶相关理论、方法、技术与产品。
2015年,中国船级社发布了《智能船舶规范》,是世界上第一部完整的智能船舶规范,明确了智能船舶在智能航行、智能船体、智能机舱、智能能效管理、智能货物管理、智能集成平台等方面的技术要求;2018年,工信部启动高技术船舶科研项目——智能船舶1.0专项,开展散货船、油轮和集装箱船的智能化技术研发,示范船获得了智能航行、能效、机舱等智能船舶符号;2019年,科技部启动了国家重点研发计划项目——基于船岸协同的船舶智能航行与控制关键技术研究,项目内容包括研究支撑船舶智能航行的岸基信息支持、通信及网络安全和远程驾驶技术,开发内河船舶重点航段的智能航行系统、沿海船舶航线智能优化及自主航行系统。2020年,工信部启动了高技术船舶科研项目——绿色智能内河船舶创新专项,开展内河船舶技术体系架构研究,明确智能化、绿色化技术发展路径,并开展示范应用。2021年,国家重点研发计划“综合交通运输与智能交通”专项示范项目64TEU集装箱船“国创号”正式下水,是我国首艘自主研发、设计、建造,拥有完全自主知识产权的内河绿色智能集装箱船。
2.2 船舶智能航行的难点与关键技术
2.2.1 船舶驾驶过程技术分析
船舶在水域中航行是具有六个自由度的运动,体现出规则地域化、非一致性、不稳定性、控制力不足等特征,故当今船舶智能航行存在以下问题:一是船舶的航行记录无法与多变的环境相匹配;二是单纯基于参数训练的黑箱模型(如Deep Learning)很难直接应用于船舶驾驶过程;三是货运船舶尺度大、运动惯性大、操纵控制难度大,控制精度的实用性有待提升。针对船舶驾驶过程的技术分析如图9所示。
2.2.2 “航行脑”系统与船舶智能航行分级
作者及其团队率先提出了“航行脑”系统的概念,认为智能船舶技术的核心是智能航行,通过研发“航行脑”系统,探索“机器脑”对“人脑”的替代和机器对船员驾驶行为与决策逻辑的学习,实现船舶自主航行的感知、认知、决策等功能[2],如图10所示。船舶智能航行分为5个等级,针对具体功能的分级描述如表1所示。值得关注的两个核心要点是:“航行脑”系统是否能够做出与人相近甚至优于人的决策?“航行脑”系统是否能够自行执行自己生成的决策?
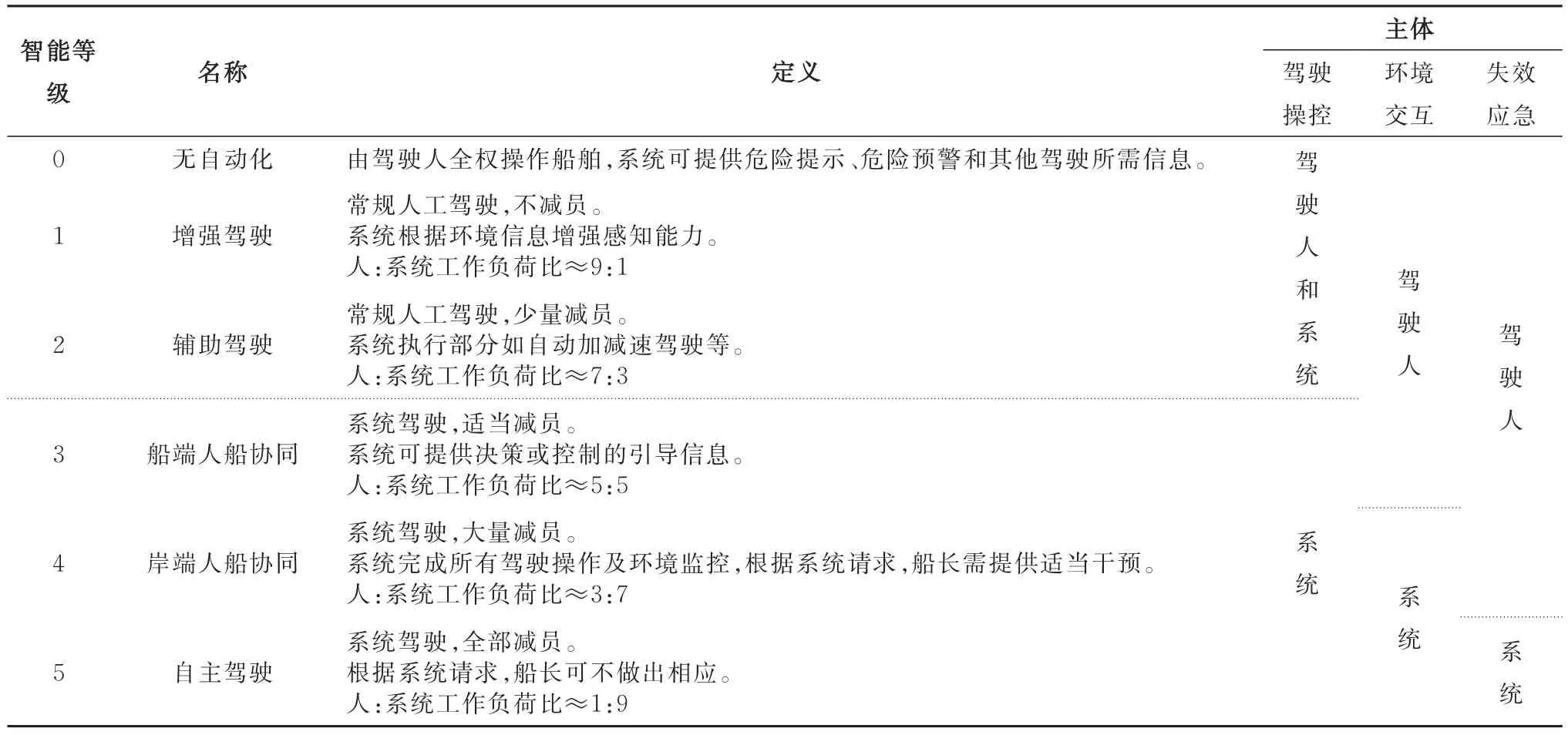
表1 船舶智能航行的功能分级描述
2.2.3 船舶智能航行的难度及其关键技术
船舶智能航行存在态势感知精度低、存在盲区,船岸通讯不稳定,数据融合复杂,状态操控复杂,避碰决策困难,运动控制鲁棒性低等难题[3],针对这些难题的关键技术包括:全息感知技术、船岸通讯技术、远程驾控技术、避碰决策技术[4]、运动控制技术、编队航行技术。
2.3 船舶智能航行——辅助驾驶
辅助驾驶系统融合多源导航信息,并对多源信息做出初步甄别,实现目标匹配与重构,在雨天、雾天和夜间等能见度不良情况下也能具备良好的感知能力,基于船岸协同的辅助驾驶系统如图11所示,武汉理工大学研制的船舶辅助驾驶系统已在江苏南京板桥汽渡、浙江舟山渡轮等推广应用[5]。
日本吉野航行辅助系统基于虚拟现实增强技术实现对航行环境的认知和对自身运动态势的感知,具体技术路径是感知船舶的距离、速度、转向点等必要航行信息,通过AR技术叠加到驾驶室显示屏的实时视频图像中,在能见度不良情况下,驾驶员将系统虚拟信息同现有助导航仪器结合,实时监测目标船舶和自身的航行动态信息与预测数据,从而实现辅助驾驶,如图12所示。
2.4 船舶智能航行——远程驾驶
远程驾驶系统通过岸基控制中心对船舶进行远程控制,实现船舶的远程航行。操作者可通过增强现实技术观察船舶周围的情况,船上船员在应急情况或必要时可接管船舶的操作。2020年,比利时SEAFAR公司在一条长度为135米的驳船Zonga号上进行了远程驾驶过闸试验,通过船端/基础设施侧多源信息融合,实现协同感知,岸基控制中心实时集成分析船舶运行状况,具备同时管理和操作多条船舶的功能;2021年,在集装箱船Deseo上实现了由泽布吕赫港到安特卫普港的全航程远程操作,相关功能与技术指标如表2所示。
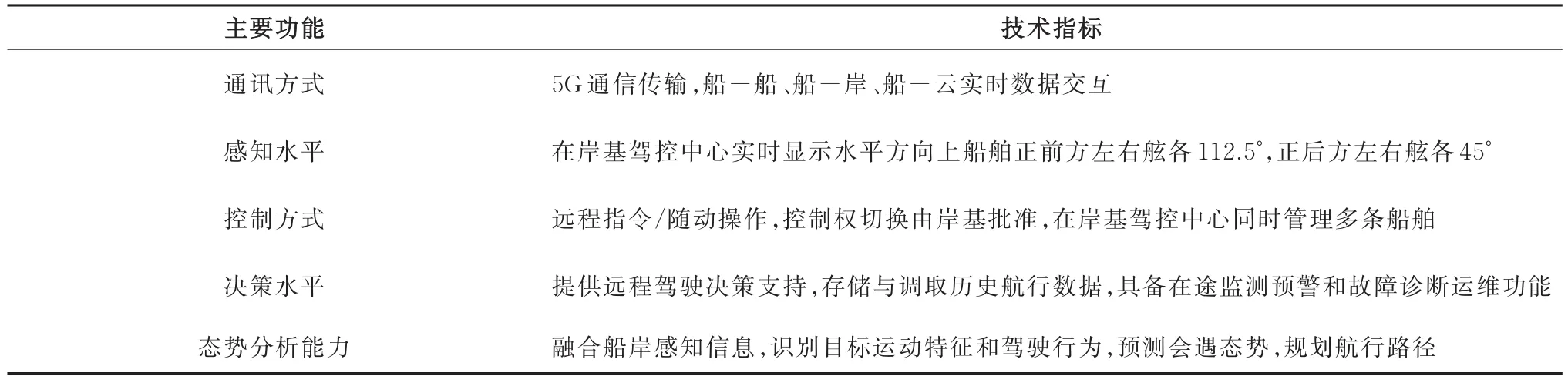
表2 船舶远程驾驶功能与技术指标
2020年,武汉理工大学承担了欧盟地平线2020计划中的SAFEMODE项目——远程驾驶船舶驾控人员测试与评价(Operator Assessment of Remotecontrol Ships),旨在深入研究远程驾驶人为操作的可能性、限制和安全余量,为人因分析提供测试验证平台[6],如图 13所示。
2.5 船舶智能航行——自主航行
自主航行是船舶智能航行的高级阶段,武汉理工大学研发了基于“航行脑”系统的7米船模自主航行系统[7-8],完成了船模白天/夜间自主离泊、自主航行、自主掉头、自主靠泊等试验,如图14所示。同时,以欠驱动船舶自主控制为目标,开展了基于学习模型预测控制的受限水域航道船舶路径跟随方法研究[9],如图15所示。
3 未来新一代航运系统展望
在水路交通未来发展环境方面,“双碳战略”将促进绿色航运发展,船员短缺将推动智能航运发展,航运系统韧性提升将改进航运安全。
比利时SEAFAR公司已开展船舶岸基远程驾控研究,欧盟NOVIMAR项目围绕船舶编队运输的概念、虚拟仿真、模型试验、实船试验开展了研究。
未来新一代航运系统将以信息物理系统为基础,成为绿色智能船舶[10]、数字生态设施、岸基支持系统、韧性组织运营的集合体,旨在实现船舶、港口、航道和客货等分散物理单元的信息互联共享,呈现“岸基驾控为主、船端值守为辅”的运输船舶组织运营新范式,如图16-17所示。
4 结 语
(1)目前已实现的港口自动化系统主要应用在大型集装箱作业港口,而在内河港口的应用尚少。多货种的港口装卸作业自动化、智能化作业系统的研制成为未来发展重点。
(2)港区智能综合交通系统研发是未来关注的重要方向,主要包括港区内部交通系统和港区外部集疏运系统。
(3)国内外智能船舶技术尚处于积极开发和探索阶段。面向运输船舶的单一智能功能已开展应用,如感知增强、安全辅助驾驶、能效控制等智能系统,其主要目的在于提升营运船舶的安全性、降低能耗、优化航速、控制能效。
(4)船舶智能航行应按照辅助驾驶、远程驾驶、自主航行的技术趋势逐步发展。就智能船舶的发展方向而言,应优先在内河和近海船舶上开展应用示范,尤其要注重与绿色动力技术的同步发展。
