巡检机器人在昆明安石路综合管廊智慧化上的应用
2022-02-10赵晓强梁仕贤董亮凌琪
赵晓强,梁仕贤,董亮,凌琪
(1.昆明经安市政建设投资有限公司;2.中冶京诚工程技术有限公司)
1 引言
综合管廊即地下城市管道综合走廊,即在城市地下建造一个隧道空间,将电力、通信、燃气、供热、给排水等各种工程管线集于一体,设有专门的检修口、吊装口和监测系统,实施统一规划、统一设计、统一建设和管理,是保障城市运行的重要基础设施和“生命线”。
在国家政策推动、城市管理升级的双重驱动下,地下综合管廊的建设正以前所未有的速度推进,成为改善城市环境、保障城市运行安全、有效拉动投资、打造经济发展新动力的重要举措,是提高城市综合承载能力、提升城市运行水平、解决“马路拉链”等问题的有效途径。
昆明经开区综合管廊主要建设区域为新建道路,规划建设管廊长度约为80km。其中,安石公路市政化改造工程建设内容包括市政道路6806.45m,地下综合管廊8372m。地下综合管廊工程建设主要包括电力、通信、给水、中水、污水、燃气管线和一座监控中心。管廊断面为(2.2m+3.4m+1.7m)×3.3m三舱,全长为8099m,共计45个防火分区。
设于地下的城市工程管线是城市基础设施的重要组成部分,一旦失控,将对城市生产、生活造重大损失,严重影响城市运营。为增强城市“生命线”运行的安全稳定,利用智能化手段对综合管廊监测、监控、管理和应急指挥,实现全生命周期的管控,为管廊以及廊内管线与人员提供基本的安全保护,信息技术的应用引领城市管廊建设步入“智慧时代”。
2 管廊巡检情况分析
当前,国内综合管廊运维管理与作业经验、技能相对缺乏,巡检维护以人工作业为主,手段及装备的信息化、智能化水平偏低,人工投入大、响应速度慢、安全保障有限。随着城市综合管廊运营规模的不断增加,运维工作量激增,以人工为主的运维方式难以满足经济性及安全性要求。
①管廊内阴暗潮湿、通风不好、易聚集有毒有害气体,对巡检人员健康和安全不利。
②管廊距离较长,巡检内容较多,人工巡检劳动强度较大。
③巡检易受人员主观因素影响,存在巡检不及时现象。
3 巡检机器人应用
3.1 技术思路
为了进一步提高综合管廊的防灾减灾能力,保障综合管廊的安全运行,提高巡检的工作效率,在综合管廊实现了固定、离散在线监测的基础上,安装巡检机器人,以现代技术手段实现对重点综合管廊的不间断巡检,取代人工巡检。同时,还可以逐步实现对综合管廊内突发性事件的现场处理,在第一时间采取最有效的处理措施,相对传统的人工干预,有快速、安全、高效的优势。
巡检机器人是由移动载体、通信设备和检测设备组成,采用人工遥控、半自主或全自主控制模式,用于综合管廊巡检作业的移动装置。巡检机器人是城市地下综合管廊实现数字化、智能化运维的一项重要手段,是管廊运维发展的一大趋势。
根据目前综合管廊的巡检现状和需求,设计思路如下:
1)实现管廊巡检全覆盖
有效解决在线监控系统在管廊监控过程中存在的固定化、盲点多、离散式等问题;
2)提高人工巡检效率,减少工作人员出入廊内巡检时间
从辩诉交易案件与认罪认罚案件的共同点上来看:一方面,无论是辩诉交易的案件还是认罪认罚的案件,律师介入的目的都在于保证被告人认罪的自愿性、明知性和理智性,确保被告人选择认罪认罚或做出的有罪答辩是出于自身内心的真实意思表示,而不是迫于外界的压力或受到强迫、威胁的情况下做出的;[11]另一方面,律师在这两种案件中都要积极参与控辩双方的“控辩协商”过程并且在这一过程中律师还扮演着极其重要的角色。除了以上提到的共同点之外,二者之间的差异则更为明显。
巡检机器人系统将有效提高地下综合管廊的运行管理效率,及时发现管廊内设备的各项参数异常和故障情况,大大减少管廊灾害和事故的发生。
3)与其他系统联动
通过高速网络通信系统,实现机器人、在线监控、运维管理等系统之间的协调联动,并由智慧管控平台统一调度控制。
3.2 系统架构
智能巡检机器人系统通过对智能巡检机器人的自动远程控制和手动控制,把采集的数据接入、存储、图形化界面展示、GIS定位及立体展示;系统通过WEB服务将采集数据对外共享;并实现对智能巡检机器人进行遥控、任务配置、视频访问、数据访问。如图1所示,系智能巡检机器人统采用三层架构。
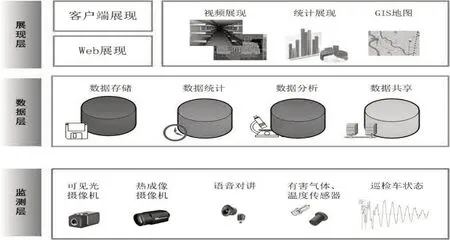
图1 综合管廊巡检机器人系统架构图
监测层:监测层通过摄像头、热成像摄像头、气体检测仪表负责采集原始数据。
数据层:数据层负责将获取的原始数据分类统计、存储和分析。在本层,归一化之后的数据经应用服务系统存储于数据库中,作为历史数据进行保留;应用服务系统在存储数据的同时,把数据分发给专家分析系统、告警分析系统和联动分析系统,各个系统根据自己的业务逻辑对需要的数据进行处理,生成结果后返回应用服务,以便显示给最终用户或触发报警、联动设备。
表现层:该部分直接面向操作人员,通过客户端向操作人员呈现系统的各类信息,例如视频、检测数据、地图、报警信息等,可以列表视图、GIS视图、图形展示、曲线展示、历史记录查询、历史数据分析、数据导出等形式显示给操作人员。
3.3 功能模块加载
智慧管廊机器人搭载了高清摄像头、红外热像仪、云台、气体检测传感器、温湿度传感器、实时对讲平台、声光报警器、超声停障系统等(见图2、表1)。
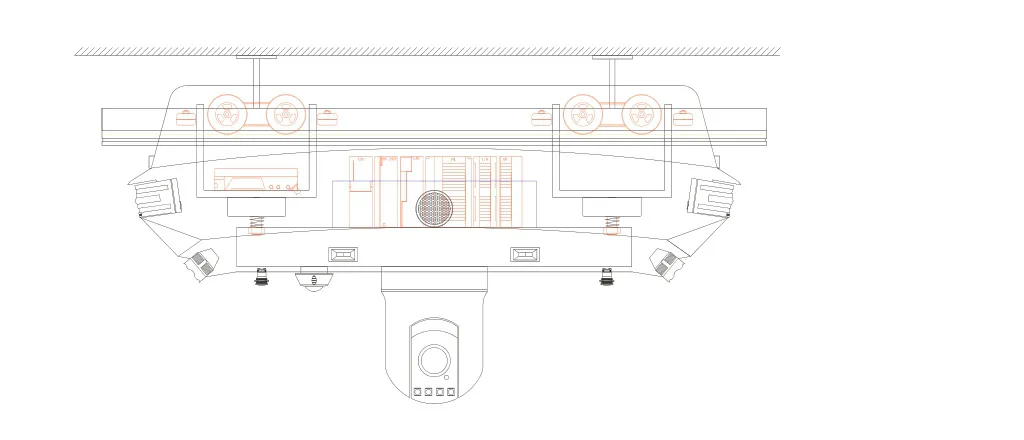
图2 挂轨式机器人本体
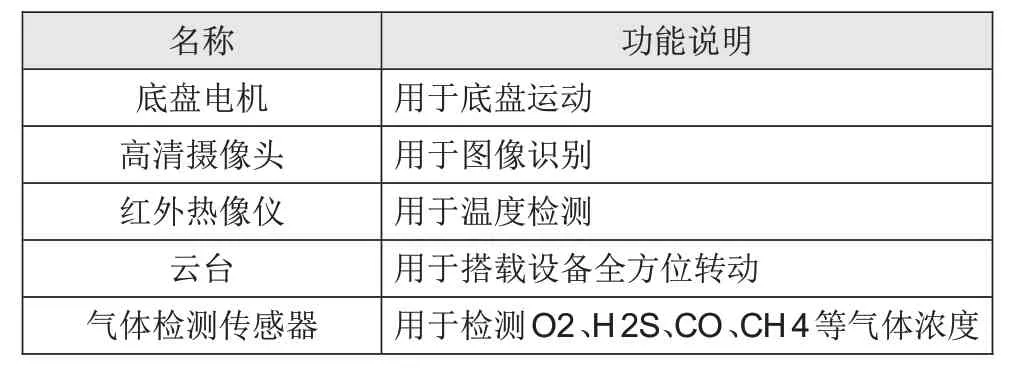
表1 设备及功能
续表
3.4 功能设置
①远程可控自动行走,定位RFID、避障、行走障碍处理、姿态调整。
②巡检机器人的运行速度应满足巡检功能要求,运行速度0m/s~2m/s可调,可根据自行巡检、紧急事件高速行走、遇人跟踪进行自动速度匹配。
③通过在轨道上镶嵌齿状条带,增加摩擦力,实现机器人在小于20°的坡度上能够平顺运动。
④刹车定位,实现机器人在水平轨上最大刹车距离小于1m。
⑤转弯半径最小2m,并具备弯道自动减速通过功能。
2)智能巡检
①多种巡检模式:定时巡检、周期巡检、不间断巡检。
②能够根据巡检任务自行巡检,在巡检点可以精准定位,紧急事件能够高速到达,遇到障碍能够自动停车告警,以及遇到人员智能减速跟踪探测。
③智能视频:能够通过高清视频加可见光照明灯,以及全方位云台和大倍数光学镜头控制,实现视频智能监测。
④通过红外热成像监视综合管廊内发热体红外热辐射成像测温,并自动进行事故预警。
⑤综合管廊3D成像:通过红外激光雷达对综合管廊做剖面扫描,并形成综合管廊3D图像。
⑥综合管廊环境监测:通过温湿度、有害气体含量、空气含氧量、综合管廊内烟雾探测,实现管廊环境数据监测。
3)交互式对讲指挥功能
通过机器人上加载的高增益拾音器、高音喇叭和高清摄像机实现平台与综合管廊人员的音视频信息交互。
3.5 机器人安装
机器人安装在综合舱顶部中心,轨道式安装,机器人底部距管廊地面不低于1.9m(见图3)。
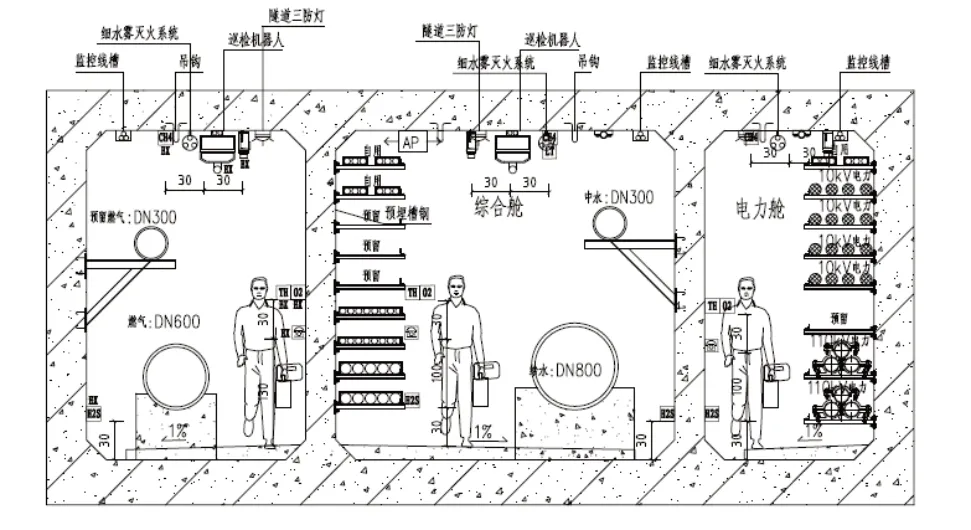
图3 机器人安装示意图
3.6 穿越防火分区
综合管廊设有防火分区,每隔一定距离安装一套防火门。解决穿越防火分区是巡检机器人在综合管廊中应用绕不开的问题。在昆明安石路管廊项目上,设计一套供综合管廊巡检机器人通过的防火门,安装在防火隔断的顶部,并配备联动控制系统,当巡警机器人的位置接近防火隔断时,防火门自动打开,待机器人通过后,防火门自动关闭。
3.7 与综合管廊智慧管控平台深度融合
巡检机器人是综合管廊智慧管控的重要组成部分,综合管控平台和机器人软件应进行深度融合和对接。作为数据采集终端和执行机构,巡检机器人应接受智慧管控平台的任务,并在任务执行过程中向平台反馈视频图像、红外图像、环境数据、实时对讲、故障报警等,管控平台对数据进行实时分析,并进行报警和决策。针对多个机器人协同巡检作业,综合考虑巡检机器人行进速度、巡检任务时间估算、充电器安装位置、充电时间等多个因素,采用路径优化算法,对每个机器人的巡检路径进行智能排班。
4 结语
巡检机器人在昆明安石路管廊智慧化中的应用效果良好,大大提高了巡检的自动化程度,提高了巡检的效率,降低了人员的危险。